Изобретение относится к автоматизированным системам управления технологическими процессами (АСУ ТП) с помощью управляющих вычислительных машин (УВН) и может найти применение, в частности, в АСУ ТП широкополосных станов горячей прокатки.
Известна система автоматизированного управления, включающая датчик параметра, УВМ, станцию управления, локальный регулятор и исполнительный механизм, в котором УВМ решает только информационные задачи, а собственно управление осуществляется локальными регуляторами или вручную, причем зада-,5 ние для регуляторов устанавливают вручную .
Недостатком этой системы является трудоемкость ручной установки задания регулятором или ручного управления 20 исполнительными механизмами. Кроме Того, ручное задание не позволяет устанавливать оптимальные уставки.
Наиболее близкой к предлагаемой по технической сущности и достигаемому результату явл Тется система управления технологическим процессом,осодержащая блок датчиков, выход которого соединен с первыми входами блока локальных регуляторов и УВМ, второй вход которой подключен к первому входу пульта управления, второй и третий выходы которого соединены с первым и вторым вxoдa tи выходного преобразователя, а вход через блок аварийного отключения - с первым входом УВМ, подключенной вторым выходом к третьему входу выходного преобразователя, четвертый вход которого соединен с выходом блока локальных регуляторов, а выход - с входом блока исполнительных механизмов, дискретный интегратор с памятью, первый вход которого соединен с выходом пульта управления, второй вход - с третьим входом УВМ, а выход - с вторым входом блока локаль3Э
ных регуляторов и с третьим входом УВМ 2 .
Известная система имеет недостаточную надежность работы. В этой системе предполагается, что при отказе УВМ по следняя обязательно формирует сигнал Отказ, однако, как показывает практика эксплуатации АСУ ТП на базе УВМ, имеется иного случаев, когда УВМ имеет все признаки нормальной работы, но тем не менее выдает неправильные управляющие сигналы на исполнительные устройства, т.е. имеют место ситуации когда есть сбои работы программного обеспечения (ПО) , а сигнала Отказ от УВМ нет. Следствием неконтролируемых отказов УВМ в условиях применени последних в АСУ ТП,. например, на соврменном широкополосном стане горячей прокатки (ШСГП) может явиться возникновение аварийных ситуаций, связанных с поломкой нажимных винтов, валков и др. прокатного оборудования, а значит и длительные простои стана. Кроме того, известное устройство не обеспечивает достаточное качество управления.
В данной системе задание уставок локальному регулятору выдается оператором с пульта управления. Такое задание уставок может быть принято в сравнительно несложных АСУ ТП, где требуется небольшое количество задаваемых уставок и в тех случаях, когда их оптимальные величины легко рассчит тать, В случае управления сложными технологическими процессами, такими, например, как регулирование толщины полосы на ШСГП, где количество задаваемых уставок велико и, главное, их оптимальные величины нужно предварительно рассчитывать для десятков технологических ситуаций, задание уставок вручную не позволяет оптимизировать начальную настройку объекта регулирования, что ведет к снижению качества управления (для ШСГП - к уменьшению точности регулирования толщины полосы.
Цель изобретения - повышение надежности работы системы.
Указанная цель достигается тем, что в системе управления технологическим процессом, содержащей блок датчиков, управляющую вычислительную машину (,УВМ, блок локальных регуляторов, пульт управления, выходчой преобразопатель, блок исполните;(-.ных ме284
ханизмов, дискретный интегратор с памятью и блок аварийного отключения, причем выход блока датчиков соединен с первыми входами блока локальных регуляторов и УВМ, второй вход которой соединен с первым выходом пульта управления второй и третий выходы которого соответственно соединены с первым и вторым входами выходного преобразователя, а первый вход - с выходом блока аварийного отключения, вход которого соединен с первым выходом УВМ, второй вход которой соединен с третьим входом выходного преобразователя, четвертый вход которого соединен с выходом блока локальных регуляторов, второй вход которого соединен с выходом дискретного интегратора, выход выходного преобразователя соединен с входом блока исполнительных механизмов, а четвертый выход пульта управления соединен с первым входом дискретного интегратора с памятью, блок аварийного отключения содержит элемент задержки на включение, элемент задержки на отключение,схему НЕ и схему ИЛИ, при этом второй выход УВМ соединен с вторым входом дискретного интегратора, а третий выход УВМ соединен с вторым входом пульта .управления, причем входы элементов задержки соединены и являются входом блока аварийного отключения, выход элемента задержки на включение соединен с первым входом схемы ИЛИ, выход которой является выходом блока аварийного отключения, выход элемента задержки на отключение соединен с входом схемы НЕ, выход которой соединен с вторым входом схемы ИЛИ.
Выполнение блока аварийного отключения, состоящим из элемента задержки на включение, элемента задержки на отключение, схемы НЕ и схемы ИЛИ, позволяет повысить надежность работы системы за счет повышения надежности обнаружения скрытых отказов УВМ и ПО.
Ввод связи третьего выхода УВМ с вторым входом пульта управления позволяет автоматизировать расчет оптимальных уставок для локального регулятораи тем самым повысить качество регулирования .
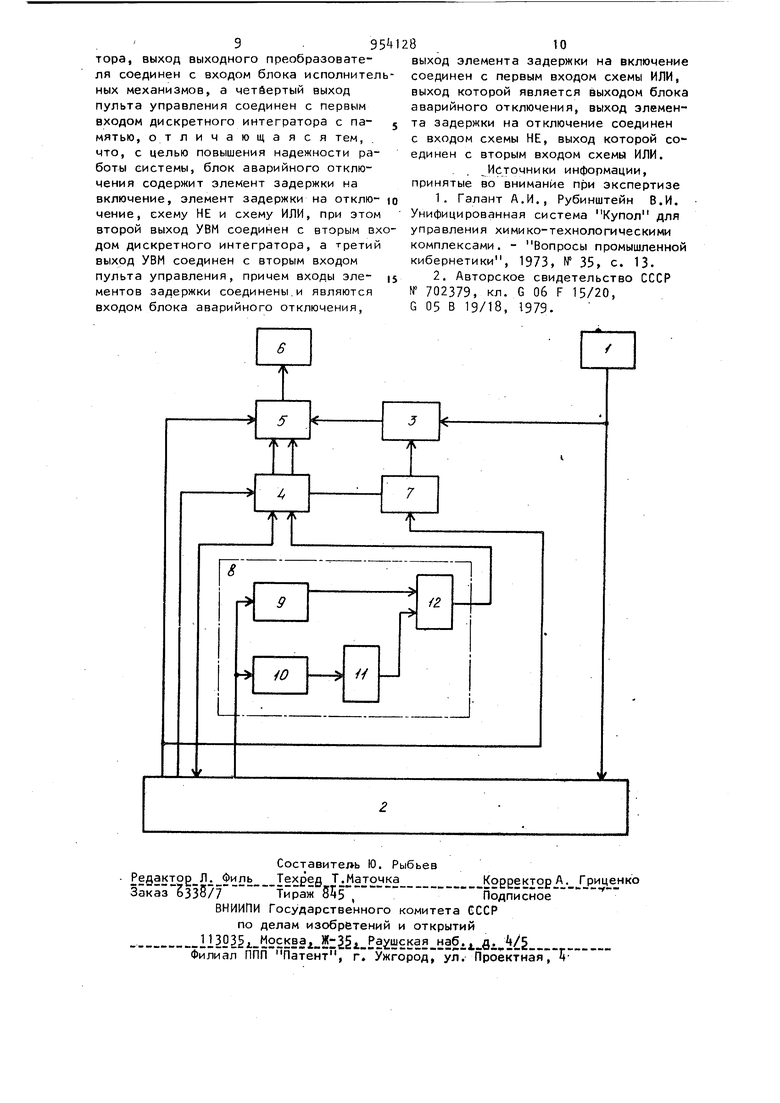
Ввод связи второго выхода УВМ с вторым входом дискретного интегратора с памятью позволяет запоминать величину управляющего сигнала, выдаваемого УВМ 5 в момент, предшествующий сбою УВМ или ПО. Элемент задержки на включение обе печивает задержку на включение при подаче ступеньки напряжения положительной полярности на его вход. В ка честве этого элемента может быть использован, например, элемент задержк на включение серии Логика Т ТЗОЗ. Элемент задержки на отключение обеспечивает задержку на отключение при подаче нулевого напряжения (или отрицательной ступеньки ) на его вход В качестве этого элемента может быть использована комбинация элементов се рии Логика Т Т302-Т106. Первый выход УВМ обеспечивает выдачу (генерацию) последовательности импульсов с определенным периодом пр бессбойной работе УВМ и ПО. Период следования импульсов Т определяют до пустимой величиной приращения (квантом) управляющего сигнала, в результ те которого не может произойти таког изменения состояния технологического процесса, при котором может возникнуть аварийная ситуация. Длительност задержек на включение и отключение устанавливают величиной 7 Т +S, где S «Т. . На чертеже представлена структурн схема системы. Система содержит блок 1 датчиков, УВМ 2, блок 3 локальных регуляторов, пульт 4 управления, выходной преобра зователь 5, блок 6 исполнительных механизмов, дискретный интегратор 7 с памятью и блок 8 аварийного отключения, содержащий элемент 9 задержки на включение, элемент 10 задержки на отключение, схему НЕ 11 и схему ИЛИ 12, причем выход блока 1 датчиков соединен с первыми входами УВМ 2 и блока 3 локальных регуляторов, второй вход УВМ 2 соединен с первым выходом пульта управления, второй и третий выходы которого соответственно соединены с первым и вторым входами выходного преобразователя 5, четвертый вход - с первым входом дискратного интегратора 7, а первый вход - с выходом блока 8 аварийного отключения, который является выходом схейы ИЛИ 12, первый вход которой соединен с выходом элемента 9 задержки на включение, а второй - с выходом схемы НЕ 11, вход которой соединен с выходом элемента 1Q задержки на отключение, а входы элементов 9 и 10 286 сЪединены с первым выходом УВМ 2, второй выход которой подключен к третьему входу выходного преобразователя 5, четвертый вход которой соединен с выходом блока 3 локальных регуляторов, а выход - с входом блока 6 исполнительных механизмов, третий вход УВМ соединен с вторым входом пульта k управления, первый выход которого соединен с вторым входом УВН 2, а четвертый выход - с первым входом дискретного интегратора 7, второй вход которого соединен с вторым выходом УВМ 2, а выход - с вторым входом блока 3 локальных регуляторов. Система работает следующим образом. Возможны три режима работы системы: управление-от УВМ, управление с помощью локальных регуляторов и ручное управление от оператора. Работу системы рассмотрим на примере АСУ ТП ШСГП. Управление с помощью УВМ. ПО си(темы обеспечивает на первом выходе УВМ выдачу последовательности и лпульсов при бессбойной работе. Причем период следования импульсов выбран из условия квантования управляющего си1- нала таким образом, чтобы обеспечить безаварийную ситуацию при сбоях ПО и технических средств, т.е. УВМ выдает за период следования импульсов малое приращение управляющего сигнала. Оператор с помощью пульта 4 задает режим работы системы. УВМ 2 рассчитывает для данной технологической ситуации оптимальные уставки блоку 3 локальных регуляторов, KOTOpVie выдаются на пульт t управления по третьему УВМ. Сигналы с датчиков 1 поступают на первый вход УВМ 2, где они обрабатываются, и УВМ 2 выдает управляющий сигнал в блок 5 выходных преобразователей, через который управляющий сигнал поступает на исполнительные механизмы 6. При этом на первом выходе УВМ 2 постоянно присутствует последовательность импульсов с периодом Т, которые поступают на входы элементов 8-10. Благодаря тому, что Г несколько больше Т на выходе элемента 9 задержки постоянно присутствует нуль, если на входе реле имеется непрерывная, последовательность импульсов. При таком же условии на выходе элемента 10 задержки постоянно присутствует единица, так как элемент 10 задерживает нуль или отрицательный сигнал. На входах схемы ИЛИ присутствуют нули, следовательно, на выходе блока 8 также нуль. В случае, если произойдет сбой УВМ или ПО, последовательность импульсов на первом выходе УВМ 2 обрывается..При этом возмож- 5 ны два случая: на первом выходе УВМ 2 вместо последовательности импульсов присутствует высокий потенциал; на первом выходе УВМ 2 присутствует нуль или низкий потенциал. В первом случае по истечении времени задержки на выходе элемента 9 появляется единица (высокий потенциал), которая через схемы ИЛИ 12 поступает на первый вход пульта k управления, который закрывает прохоукдение управляющих сигналов от УВМ 2 в преобразовтель 5. Во втором случае по истечении времени задержки на выходе элемента 10 появляется нуль (отрицательный потенциал), который 20 инвертируется схемой. НЕ 11, откуда единица попадает в пульт Ц управления, который, как и в первом случае, закрывает третий вход преобразователя 5. После закрытия третьего входа в преобразователе 5 включается его четвертый вход, соединенный с выходом локального регулятора 3 который теперь формирует управляющие сигналы на основании информации с датчиков 1 и дискрет-ЗО ного интегратора 7, в памяти Которого хранятся величины управляющих сигналов, выдаваемых УВМ в момент времени, непосредственно предшествовавший сбою УВМ;. Благодаря этому, а также наличию опти-з5 мальных уставок, полученных от пульта k управления, блок 7 вырабатывает необходимый управляющий сигнал, который поступает в блок 3 локальных регуляторов и далее на исполнительные ме- 40 ханизмы 6. Вследствие того, что выдача управляющего сигнала от УВМ квантуется, на третий вход преобразователя 5 не может поступать управляющий сигнал с приращением .большим, чем это допусти-45 МО условиями, обеспечиваю1цими безаварийную ситуацию на управляемом объекте. Если обнаруживается, что по истечении времени f произошел сбой, то выдача очередного кванта управляюще- JQ го сигнала на объект прекращается и включается локальная система регулирования, причем благодаря расчету оптимальных уставок для локального регулятора на УВМ качество прокатываемого металла повышается и облегчается труд оператора.
Управление от локального регулятора может производиться как в случае
сбоя ПО и УВМ, так и по инициативе оператора. В последнем случае оператор с помощью пульта 4 задает начальные уставки, а также включает локальные регуляторы 3. Сигналы с датчиков 1 поступают на первый вход блока 3 регуляторов, который вырабатывает управляющие .сигналы, поступавщие в блок.5 и далее на исполнительные механизмы 6.
В режиме непосредственного ручног управления оператор с помощью пульта Ц подает на входы преобразователя 5 управляющие сигналы, которые поле преобразования поступают на исполнительные механизмы 6.
Применение предлагаемой системы позволяет повысить надежность работы АСУ ТП за счет обеспечения выдачи квантованных приращений управляющих сигналов, величина которых в течении выбранного отрезка времени не может привести к созданию аварийных ситуаций хода технологического процесса. Кроме того, повышается качество продукции за счет расчета оптимальных уставок для локальных регуляторов и облегчается труд оператора.
Использование изобретения в АСУ ТП ШСГП может дать экономию до 100 тыс. руб. в год.
Формула изобретения
Система управления технологически процессом, содержащая блок датчиков, управляющую вычислительную машину (УВМ), блок локальных регуляторов, пульт управления, выходной преобразователь, блок исполнительных механизмов, дискретный интегратор с памятью и блок аварийного отключения, причем выход блока датчиков соединен с первыми входами блока локальных регуляторов и УВМ, второй вход которой соединен с первым выходом пульта управления, второй и третий выходы которого соответственно соединены с первым и вторым входами выходного преобразователя, а первый вход - с выходом блока аварийного отключения, вход которого соединен с первым выходом УВМ, второй вход которой соединен с третьим входом выходного преобразователя, четвертый вход которого соединен с выходом блока локальных регуляторов , второй вход которого соединен с выходом дискретного интегра
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления технологическим процессом | 1982 |
|
SU1047565A2 |
| Система управления технологическим процессом | 1988 |
|
SU1524952A2 |
| Система управления технологическим процессом | 1978 |
|
SU702379A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Цифровой регулятор | 1979 |
|
SU930230A1 |
| Устройство для аварийного управления регулирующими органами | 1978 |
|
SU894677A1 |
| Пневматическое управляющее устройство | 1983 |
|
SU1101789A1 |
| РАСПРЕДЕЛЕННАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОЛИЗОМ АЛЮМИНИЯ | 1999 |
|
RU2156834C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| Устройство для управления контуром регулирования | 1980 |
|
SU892418A2 |
