(54) УСТРОЙСТВО ДЛЯ АВАРИЙНОГО УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМИ ОРГАНАМИ
1
Изобретение относится к автоматике и может быть применено в системах цифрового управления технологическими процессами.
Известны устройства для аварийного управления исполнительными механизмами, содержащие пульт управления, управляющую вычислительную машину, коммутаторы, запоминающие блоки 1 ,
Однако такие устройства не обеспечивают достаточно надежйого управления, так как существуют ситуации, когда управляющая машина может обнару) свою ошибку лишь после выдачи управляю1цего воздействи В.
Наиболее близким к предлагаемому
является устройство для аварийного управления регулирующими органами, содержащее управляющую вычислительную машину, два цифроаналоговых преобразователя, два релейных коммута. тора, резервный регулятор, датчик,
исполнительный механизм и пульт уп равления - .
Однако известное устройство также не обеспечивает достаточного надежного аварийного управления регулирующими органами.
Цель изобретения - повышение надежности управления.
Поставленная цель достигается тем, что в устройство для аварийного
10 управления регулирующими органами, содержащее управляющую вычислительную машину, два цифроаналоговых преобразователя, два релейных коммутатора, резервный регулятор, датчик,
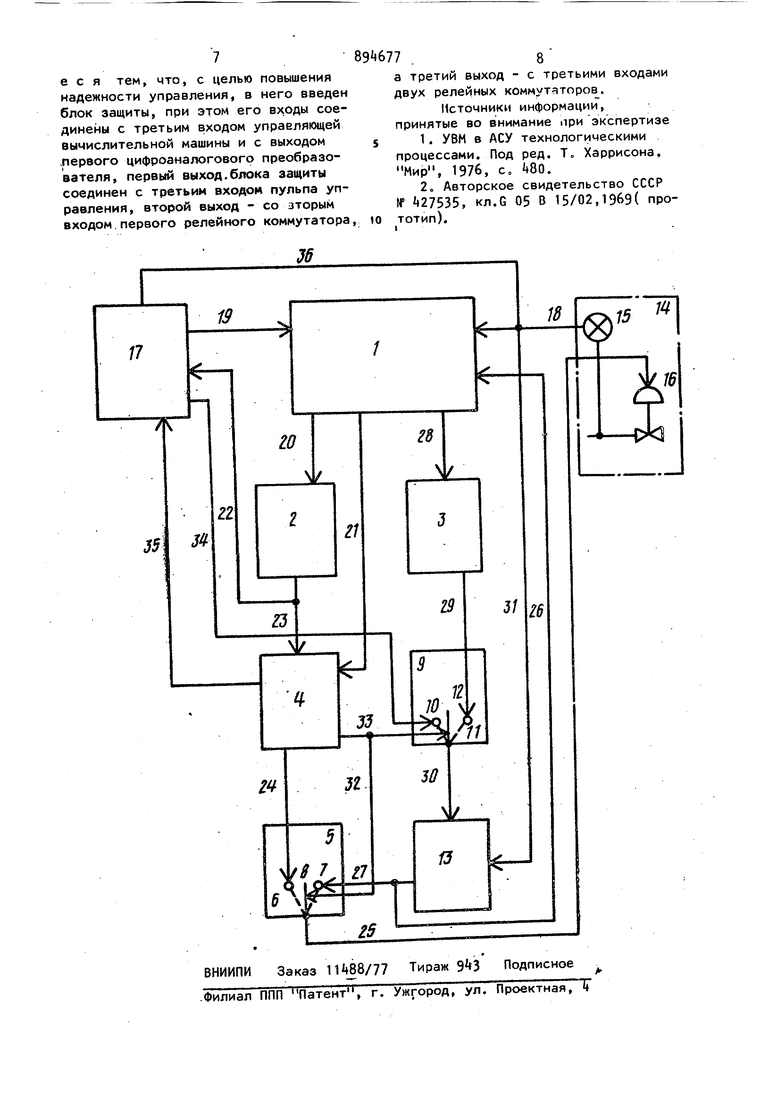
)5 исполнительный механизм и пульт управления, при этом первый выход упг равляющей вычислительной машины через второй цифроаналоговый преобразователь , второй релейный коммута20тор и резервный регулятор соединен с первым входом первого релейного коммутатора, второй выход управляющей вычислительной машины через первый цифроаналоговый преобразователь подключей к первому входу пульта управл ния , первый выход которого соединен со вторым входом второго релейного коммутатора, второй выход - с первым входом управляющей вычислительной машины, а второй вход - со вторыми входами управляющей вычислительной машины и резервного регулято.эа и с выходом датчика, выход первого релейного коммутатора через исполнительный механизм соединен со входом датчика, а выход резервного регулятора соединен с третьим входом управ ляющей вычислительной машины, введен блок защиты, при этом его входы соединены с третьим входом управляющей вычислительной машины и с выходом пе вого цифроаналогового преобразовател первый выход блока защиты соединен с третьим входом пульта управления, второй выход - со вторым входом первого релейного коммутатора, а тре тий выход - с третьими входами двух релейных коммутаторов. На чертеже изображена блок-схема предлагаемого устройства. Устройство содержит управляющую вычислительнуюмашину 1, цифроаналоговые преобразователи 2 и 3 подключенные к выходам управляющей вычисли тельной машины 1 , блок t защиты, сое диненный с выходом цифроаналогового преобразователя 2, релейный коммутатор 5 с контактами 6-8, соединенный выходами блока 4 защиты, релейный коммутатор 9 с контактами 10-12, сое диненный с цифроаналоговым преобразователем 3, резервный регулятор 13, включенный между релейными «оммутаторами 5 и 9, технологический агрегат 14, включающий датчик 15, подключенный к управляющей вычислительной машине 1, исполнительный механизм 16, включенный между релейным коммутатором 5 и датчиком 15, пульт 17 управления, связанный с технологическим агрегатом 14, управляющей вычислительной машиной 1, преобразователем 2, коммутатором 9 и блоком 4 эащиты. Устройство для аварийного управления регулирующими органами работае следующим образом. Управляющая вычислительная машина 1 (УВМ) на основании информации, полученной по линии 18 связи от датчика 15 состояния технологического агрегата 14 и положения исполнигельных механизмов 1б, а по линии 19 связи от пульта 17 состояния задающих органов, вырабатывает управляющее воздействие и передае г его по линии 20 связи в соответствующий цифроаналоговый преобразователь 2 (ЦАП), через время At , необходимое для цифроаналогового преобразования, на блок 4 защиты по линии 21 связи подается сигнал, который снимается УВМ 1 через время ЛТ, необходимое для обработки управляющего воздействия блоком 4 защиты. ЦЛП 2 получает величину управляю щего воздействия по линии 20 свя- . зи в цифровой форме, запоминает эту величину до прихода следующего воздействия, преобразует в аналоговую форму и передает по линии 22 связи на пульт 17 управления, а по линии 23 связи - на блок 4 защиты Блок 4 защиты может начать обработку лишь при наличии сигнала, полученного от УВМ 1 по линии 21 связи. Если это условие соблюдается, то блок 4 защиты сравнивает величину пришедшего управляющего воздействия с величиной предыдущего, находившегося в его памяти. В том случае, когда относительное приращение сигнала меньше допустимого, исходя из его физической сущности, управляющее воздействие запоминается и выдается на исполнительный механизм 16 по линии 24 связи, контакты 6 и 8 релейного коммутатора 5 и линии 25 связи. Такое прохождение управляющего воздействия от УВМ 1 до исполнительного механизма 16 является нормальным режимом функционирования устройства.При этом УВМ 1 на основании информации, полученной по линии 18 связи о положении исполнительных механизмов 16, а по линии 26 связи о величине сигнала на выходе резервного регулятора 13, вырабатывает величину задания резервному регулятору 13, которое обеспечивает равенство сигналов в линиях 27 и 24 связио Задание в цифровой форме по линии 28 связи поступает в соответствующий ЦАП 3 который запоминает его величину до поступления следуюи его сигнала, преобразует этот сигнал в аналоговую форму и по линии 29 связи через контакты 11 W 12 релейного коммутатора 9 далее по линии 30 связи передает резервному регулятору 13. Резервный регулятор 13 сравнивает сигнал, полученный по линии 30 связи, с сигналом о состоянии технологического агрегата k полученным п линиу 31 связи, вырабатывает управля ющее воздействие и выдает его по линии 27 связи на контакт 7 релейного коммутатора 5, а по линии 2б связи в УВМ 1. При обнаружении сбоя УВМ 1 за сче самопроверки ошибок и отказов (в том числе и полный останов УВМ 1 по соответствующим или всем сразу каналам регулирования выдается сигнал управления равный нулю. Проходя по линии 20 связи ЦЛП 2 и линии 23 связи на блок защиты, сигнал, равный О, вызывает у блока k защиты сигнал в линии 32 связи к релейному коммутатору 5, перебрасывающему контакт 8 в другое положение { контакт 7 а в линии 33 связи к релейному коммутатору 9, перебрасы вающему контакт 12 в третье положение ( контакт lOJ о При этом происходит переход на резервное управление, при котором за дание на резервный регулятор 13 поступает от пульта 17 управления по линии 3 связи, контакты 10 и 12 релейного коммутатора 9 и линии 30 связи, а управляющее воздействие от регулятора 13 поступает на исполнительный механизм 1б по линии 27 связи, контакты 7 и 8 релейного коммутатор 5 и линии 25 связи. Одновременно на пульт 17 по линии 35 связи поступает информация для оператора об ошибке по соответствующему каналу регулирования. Так как нормальный режим функционирования обеспечивает равенство сигналов в линиях 27 и 2 связи, то переход на резервное управление происходит без удара. При ошибочном попадании сигнала управляющего воздействия по линии 23 связи на блок защиты, на котором отсутствует разрешающий сигнал от УВ 1 в линии 21 связи, блок 4 защиты пр должает выдавать в линию 2А связи предыдущее значение управляющего воз действия, находящееся в его памяти ,В следующем такте УВМ 1, получив данные о положении исполнительного механизма 16 по линии 18 связи, обна ружит ошибку. В дальнейшем работа устройства аналогична случаю обнаружения ошибки УВМ 1, описанному вышВо 774 В том случае, когда относительное приращение управляющего воздействия, поступившего по линии 23 связи на блок Ц защиты, больше допустимого для данного технологического объекта , исходя из его физической сущности, блок Ц защиты также выдает си1- нал по линии 32 связи на релейный коммутатор 5, подключающий контакт 7 а по линии 33 связи - сигнал на релейный коммутатор 9 - подключающий контакт 10, В дальнейшем работа устройства аналогична случаю обнаружения ошибки УВМ 1, описанному выше. По всем остальным каналам регулирования, работа осуществляется аналогично описанному. Состояние технологического объекта 1 индексируется на пульте 17 управления по линии Зб связи. Применение предлагаемого устройства позволяет при уменьше:нии объема оперативной памяти УВМ, занимаемой программами самопроверки, повысить надежность функционирования системы. Формула изобретения Устройство для аварийного управления регулирующими органами, содержащее управляющую вычислительную-машиt y-,-деа Ц1тс1гроа шлоговых преобразователя, два релейных коммутатора, резервный регулятор, датчик, исполнительнь1й механизм и пульт управления, при этом первый выход управляющей вычислительной машины через второй цифрочналоговый преобразователь, второй релейный коммутатор и резервный регулятор соединен с первым входом первого релейного коммутатора, второй выход управляющей вычислительной машины через первый цифроаналоговый преобразователь подключен к первому входу пульта управления, первый выход которого соединен со вторым входом бторого релейного коммутатора , второй выход - с первым входом управляющей вычислительной машины, а второй вход - со вторыми входами управляющей вычислительной машины . и резервного регулятора и с выходом датчика, выход первого релейного коммутатора через исполнительный механизм соединен со входом датчика, а выход резервного регулятора соединен с третьим входом управляющей вычислительной машины, отличающевся тем, что, с целью повышения надежности управления, в него введен блок защиты, при этом его входы соединены с третьим входом управляющей вычислительной машины и с выходом лервого цифроаналогового преобразователя, первый выход,блока защиты соединен с третьим входом пульпа управления , второй выход - со вторым входом.первого релейного коммутатора
.8
а третий выход - с третьими входами двух релейных коммутаторов. Источники информации, принятые во внимание при экспертизе 5 1. У8М в АСУ технологическими процессами. Под ред. Т„ Харрисона. Мир, 1976, с, 480.
2. Авторское свидетельство СССР № «27535, кл.С 05 В 15/02,19б9( прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОРАБЕЛЬНОГО ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕГО КОМПЛЕКСА | 2004 |
|
RU2267849C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ СХЕМ | 1991 |
|
RU2106677C1 |
| Система управления технологическим процессом | 1981 |
|
SU954128A1 |
| Система автоматического управ-лЕНия ТЕХНОлОгичЕСКиМи Об'ЕКТАМи | 1979 |
|
SU807210A1 |
| Система управления технологическим процессом | 1982 |
|
SU1047565A2 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| Система управления технологическим процессом | 1988 |
|
SU1524952A2 |
| Автоматизированная система контроля параметров электронных схем | 1981 |
|
SU1010602A1 |
