2. Электронный контроллер машиниста по п. 1, отличающий с я тем, что, с целью расширения диапазона регулирования, он снабжен дополнительными элементами И, НЕ, блоком реверсирования и двоичным счетчиком, входы которого соединены с выходами блока реверсирования, один вход которого подключен к выходу 10 5 дополнительного элемента И, а другой - к выходу дешифратора, а входы дополнительного элемента И подключены соответственно к выходам одного и другого элементов НЕ, при этом вход дополнительного элемента НЕ соединен с другим выходом первого триггера, а выход - с третьим входом первого элемента И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроподвижным составом | 1979 |
|
SU931516A1 |
| ГРУППОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 2006 |
|
RU2331131C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМИ ЭЛЕКТРОПРИВОДАМИ ВАГОНОВ МЕТРОПОЛИТЕНА | 2007 |
|
RU2342727C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2006 |
|
RU2320498C1 |
| Устройство для управления электроприводом шлифовально-полировального станка | 1974 |
|
SU717722A1 |
| Устройство для ограждения места производства работ на железнодорожных путях | 1990 |
|
SU1824339A1 |
| КОМПЛЕКТНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406623C1 |
1. ЭЛЕКТРОННЫЙ КОНТРОЛЛЕР МАШИНИСТА, содержащий датчики положения рукоятки контроллера, к выходам которых подключены входы элементов НЕ и один из входов дешифратора, К другим входам которого подключены выходы элементов НЕ и первого триггера, отличающийся тем, что, с целью повышения надежности, он снабжен элементами И, входы первого элемента И подключены к выходам элементов НЕ, а выход - к разделительному входу первого триггера, другой вход которого подключен к выходу второго элемента И, соединенного входами соответственно с выходом одного из датчиков положения рукоятки контроллера и выходом второго триггера, один вход которого подключен к выходу первогр элемента И, а другой - к выходу третьего элемента И, входы которого соединены соответственно с выходом другого датчика положения рукоятки кон(Л троллера и с одним из выходов первого триггера.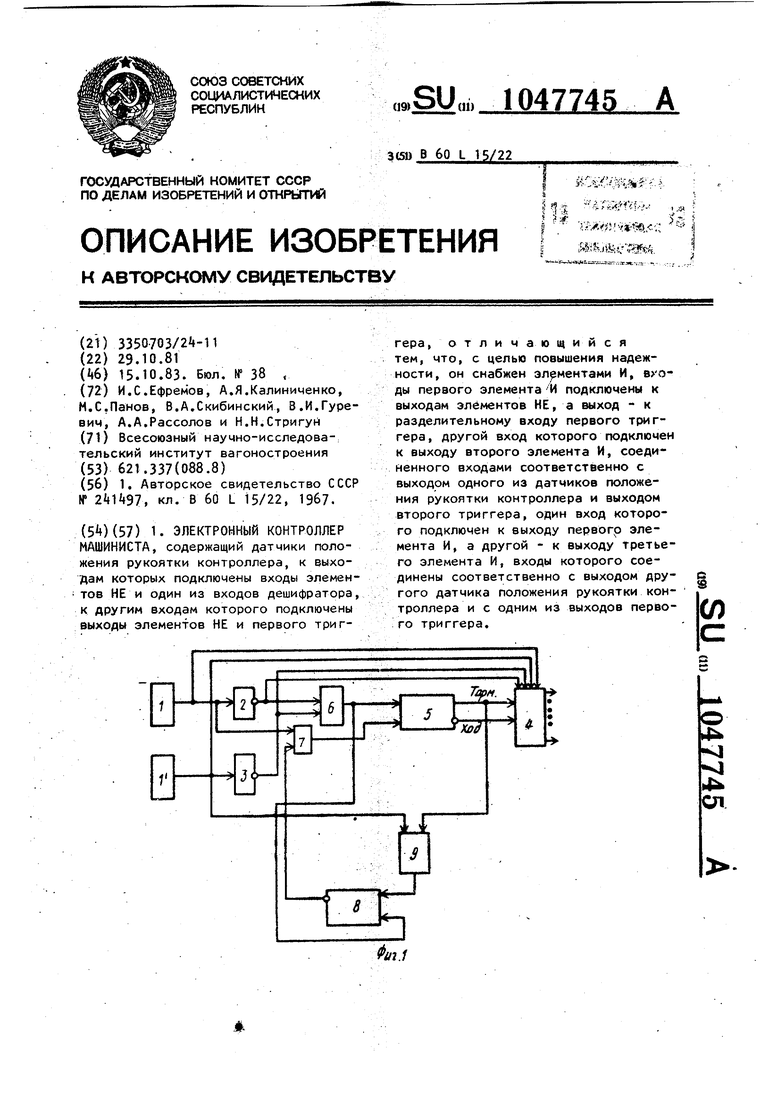
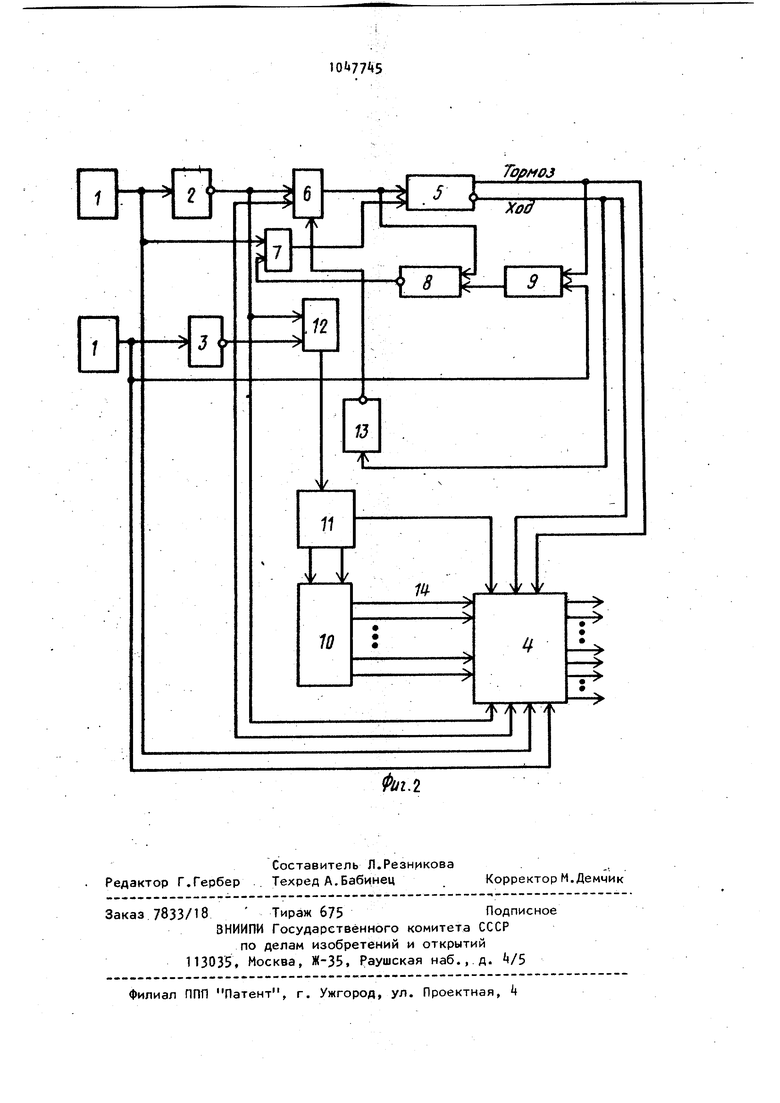
Изобретение относится к транспор ту, в частности к устройствам для управления транспортными средствами например вагонами метро, травмая, электропоездами, элекл-ровозами, теп возами. Известен электронный контроллер машиниста, содержащий датчики положения рукоятки контроллера, к выходам которых подключены входы элементов НЕ и один из входов дешифратора, к другим соответствующим входам которого подключены выходы элементов НЕ и одного из триггеров 1 J Однако такой контроллер машиниста требует наличия большого числа датчиков для задания большого числа команд, что требует набора матриц дешифратора на число логических вхо дов , равное удвоенному числу датчиков и применения элементов НЕ по чи лу датчиков,что значительно усложня ет контроллер, а следовательно, надежность такого контроллера мала. Целью изобретения является повышение надежности электронного кон троллера машиниста транспортного ср ства, а также расширение диапазона гулирования. - Цель достигается тем, что электронный контроллер машиниста, содер жащий датчики положения рукоятки ко троллера, к выходам которых подключены входы элементов НЕ и один из в дов дешифратора, к другим входам ко торого подключены выходы элементов НЕ и первого триггера, снабжен элементами И, входы первого элемента И подключены к выходам элементов НЕ, а выход - к раздельному входу перво триггера, другой вход которого подключен к выходу второго элемента И, соединенного входами соответственно с выходом одного из датчиков положения рукоятки контроллера и выходом второго триггера, один вход которого подключен к выходу первого элемента И, а другой - к выходу третьего элемента И, входы которого соединены соответственно с выходом другого датчика положения рукоятки контроллера и с одним из выходов первого триггера. Кроме того, он снабжен дополнительными элементами И, НЕ, блоком реверсирования и двоичным счетчиком, входы которого соединены с выходами блока реверсирования, один вход которого подключен к выходу дополнительного элемента И, а другой - к выходу дешифратора, а входы дополнительного элемента И подключены соответственно к выходам одного и другого элементов НЕ, при этом вход дополнительного элемента НЕ соединен с другим выходом первого триггера, а выход - с третьим входом первого элемента И. На фиг. 1 представлена блок-схема электронного контроллера машиниста для заданного режима работы транспортного средства в пределах семи позиций; на фиг. 2 - блок-схема электронного контроллера машиниста для задания любого числа режимов работы транспортного средства. Датчики 1 положения рукоятки конроллера, выполненные(Например, инукционными подключены к входам лементов 2 и 3 НЕ и к одним из вхоов дешифратора , другие входы коорого, подключены к выходу триггера , входы которого соединены с выхоами элементов 6 и 7 И. Входы элемента 6 И подключены- к выходам элемёнтов 2 и 3 НЕ, а входы элемента 7 И подключены к выходу триггера 8 и вы ду датчика 1, при этом входы три|- гера 8 подключены соответственно к выходу элемента 9 И и к выходу элемента 6 И, Входы двоичного счетчика 10 соединены с выходами блока 11 ре версирования, один вход которого по ключен к выходу дополнительного элемента 12 И, а другой - к выходу дешифратора , а входы дополнительного элемента 12 И подключены соответственно к выходам элементов 2 и 3 НЕ, при этом вход дополнительного элемента 13 НЕ соединен с выходом триггера 5, а вход - с входом элемента 6 И. Электронный контроллер машиниста работает следующим образом. Первоначально рукояткой контроллера машиниста задается режим Выбег, при котором на выходах датчиков 1 сигнал отсутствует. Учитывая это с выходов элементов 2 и 3 НЕ си налы, поступая на вход элемента 6 И проходят на один из входов триггера 5, переводя его в такое состояние, при котором появляется сигнал на одном из выходов, обеспечивая включение тормозных режимов. При по становке рукоятки контроллера машиниста в положение Тормоз, на выхо де одного из датчиков 1 появляется сигнал. При этом на одни из входов дешифратора k поступает сигнал с . одного из выходов триггера 5, а на другие входы поступает двоичный код о наборе именно этой позиции контроллера. При переводе рукоятки контроллера в следующее положение Тор моз появляется сигнал на выходе др гого датчика 1 при снятии сигнала с выхода первого датчика 1. Однако триггер 5 при этом своего положения не изменяет, так как через элемент 7 И сигнал на его второй вход не поступает. Это достигается тем, что сигнал с раздельного выхода триггера 5 поступая на один вход эле;мента 9 И, на другой вход которого поступил сигнал с выхода второго датчика 1, перевел триггер 8 в т кое :состояние, при котором на второ вход элемента 7 И сигнал не поступает. Это позволяет сохранить режим Торможение без изменения на всех трех позициях торможения. При постановке рукоятки контроллера машиниста в положении Ход после положения Выбег первоначально появляется сигнал на выходе датчика 1. Учитывая, что а положении Выбег сигнал с выхода элемента 6 И переводит триггер 8 в такое состояние, при котором с его выхода поступает сигнал на второй вход элемента 7 И, в положении Ход с датчика 1 поступает сигнал через элемент .7 И на второй вход триггера 5. Этот сигнал переводит триггер 5 в другое устойчивое состояние, при котором уже появляется сигнал на втором его раздельном выходе, который, поступая на дешифратор k, в виде ходовых режимов, разрешает выполнение команд только на Ход в соответствии с кодами , поступающими на дешифратор по другим входам с выходов датчиков и элементов НЕ при перемещении рукоятки контроллера в другие ходевые положения, при которых коды повторяются при одном и том же режиме работы. Однако, учитывая что на одном входе дешифратора присутствует сигнал ходовых режимов, происходит подача с выходов дешифратора лишь ходовых команд. При возвращении рукоятки контроллера машиниста в положение Выбег вновь с выходов элементов 2 и 3 НЕ сигнал через элемент 6 И, поступая на один раздельный вход триггера 5 переводит его в другое состояние, задавая режим Тормоз. Работа устройства (фиг. 2)в части задания режимов работы Ход и Тормоз соответствует работе устройства (фиг. 1). Для исключения работы контроллера в режиме Ход запрещается изменение состояния триггера 5 при работе на всех зонах. Это достигается подключением второго триггера 5 через элемент 13 НЕ к третьему входу элемента 6 И. Первоначально рукоятка контроллера машиниста находится в положении Выбег, при котором с выхода элемента 6 И сигнал подается на один из входов триггера 5, задавая режим Тормоз. Одновременно сигнал с выхода элемента 12 И поступает нгг блок 11 реверсирования, на другой вход которого с дешифратора 4 поступает си1- нал об исполнении команды Выбег. Учитывая, что на данной стадии на втором выходе триггера 5 сигнал отсутствует, с выхода элемента 13 НЕ подается сигнал на третий вход элемента 6 И. В данном положении, когда еще не осуществлен счет зон управления при псзступлении первого cn нала с элемента 12 И на блок 11 реверсирования, устанавливается первая зона управления, при которой появляется сигнал на выходе счет чика 10, который подается на дешифратор k. После установки рукоятки контрол лера машин1 ста в положение Ход сигнал с первого выхода Tjwrrepa 5 исчезает, а появляется на втором выходе, з.апрещая тем самым прохождение сигнала на третий вход элемен та 6 И и запрещая изменение положеиия этого триггера в режиме Ход при появлении сигнгшов на выходах ббоих датчиков 1. Эта блокировка необходим для сохранения положения триггера 5 при появлении сигналов на выходах элементов 2 и 3 НЕ. По мере увеличения позиций при изменен положения рукоятки контроллера при последующих появлениях сигнала на обоих выходах элементов 2 и 3 НЕ, что свидетельствует о переходе на другую ,зону регулирования, подает я сигнал через элемент 12 И и блок 11 реверсирования на вход сложения счетчика 10. При каждом очередном поступлении сигнала изменяется зона управления с повторением кодовых комбинаций. При возвращении рукоятки контроллера машиниста в исходное состояние при наличии сигнала о первой зоне регулирования происходит выполнение команды Выбег, триггер 5 вновь изменяет свое состояние, при котором вновь снимается сигнал с третьего входа элемента 6 И. При задании тормозных команд счетчик 10 вновь изменяет последовательно свои состояния при каждом отсутствии сигналов на выходах обоих датчиков, задавая последовательно зоны регулирования. Прохождение сигналов в этот момент через элемент 6 И на первый вход триггера 5 не запрещается, так как эти сигналы не изменяют состояние триггера 5, который задает режим торможения. Кодовые комбинации в пределах каждой зоны повторяются, как и при выполнении режима Ход. Таким образом, предлагаемый электронный контроллер машиниста представляет возможность снизить габариты, массу, потребляемую мощность контроллера, повысить надежность, привести его к более однородной схеме, используя лишь два датчика, независимо от числа режимов работы транспортного средства. Уменьшение числа датчиков одновременно приводит как к сокращению габаритов, потребляемой мощности, так и к уменьшению матрицы дешифратора, к сокращению числа логических элементов НЕ, к упрощению самой кон;Струкции контроллера машиниста,а следовательно, к повышению его надежности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
