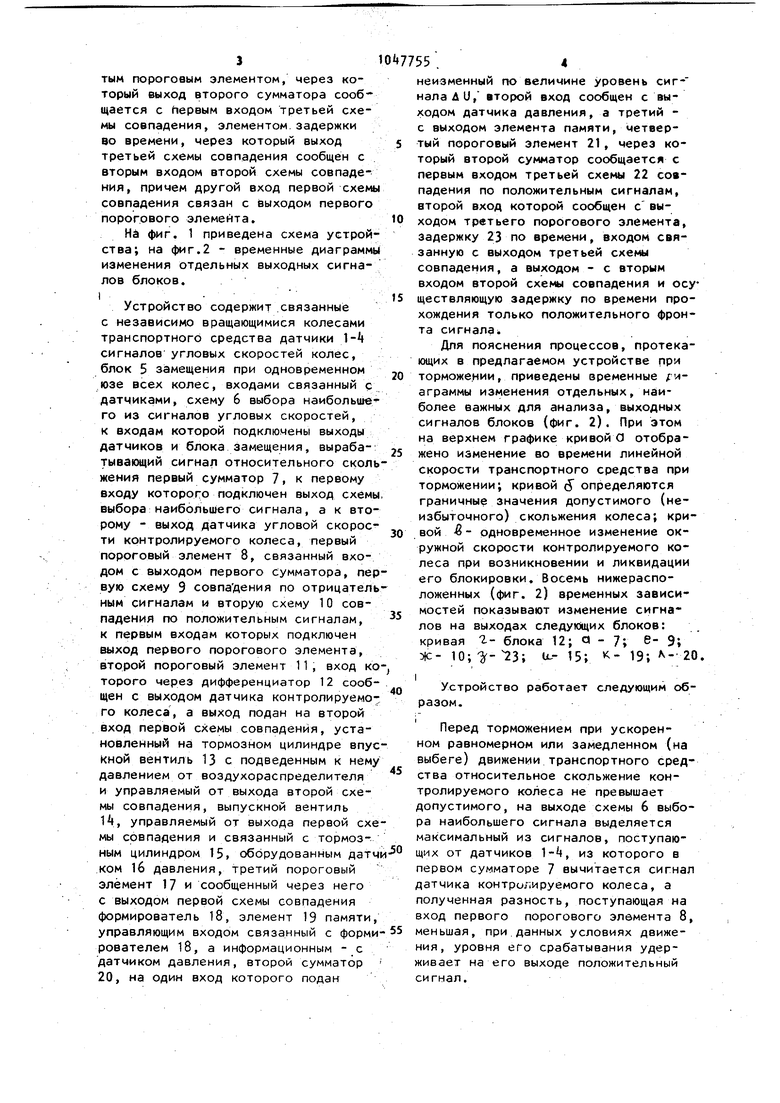
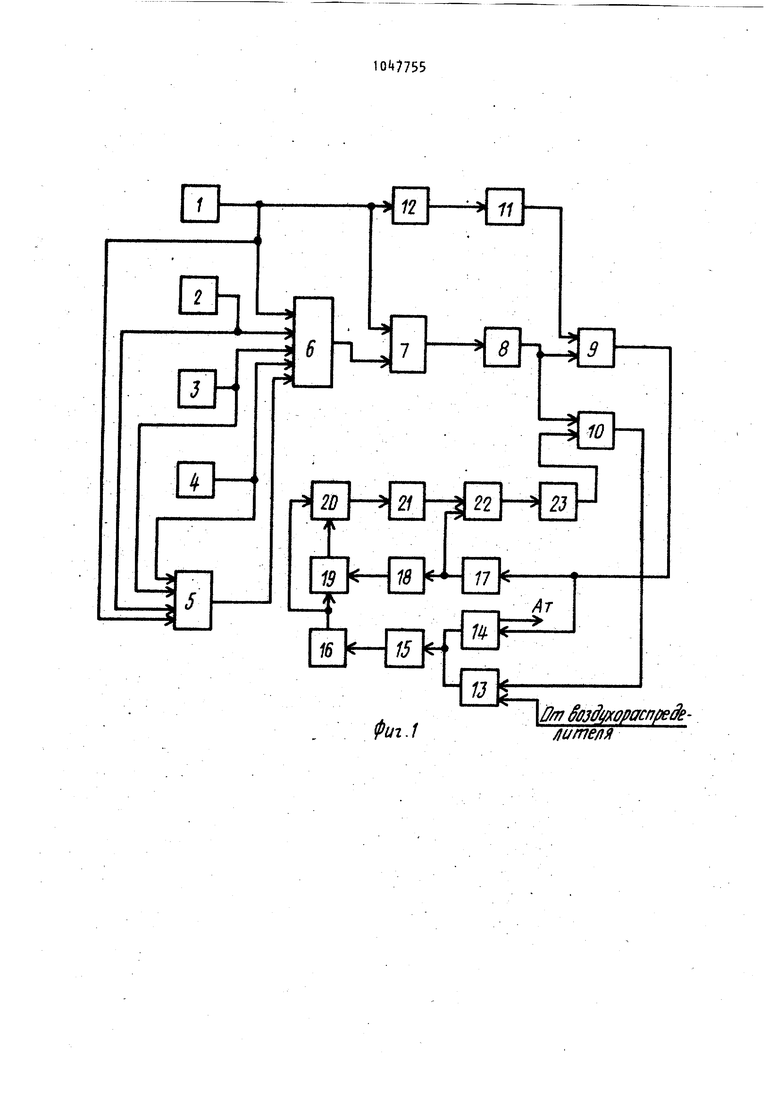
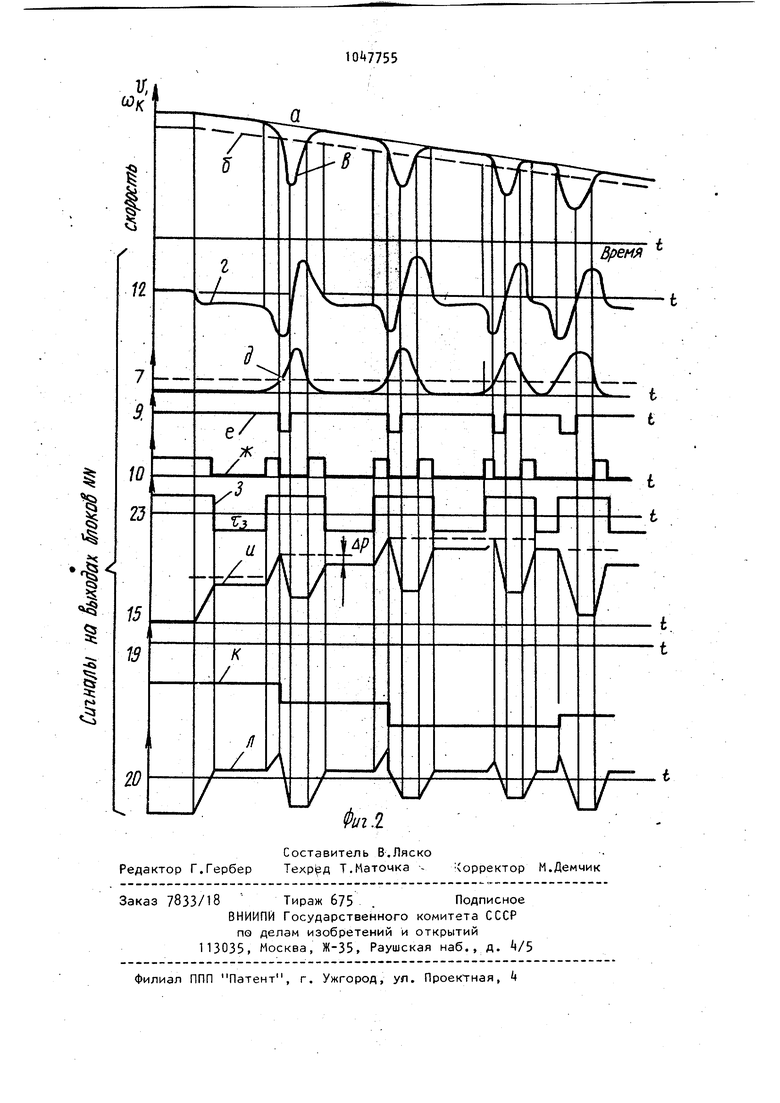
1 Изобретение относится к устройствам для автоматического управлени колесными тормозами посредством изменения давлений в тормозных цилиндрах и может быть использовано в тормозных системах транспортных средств, преимущественно на железно дорожном транспорте. Наиболее близким к изобретению является устройство для автоматического управления колесными тормоз ми по условиям сцепления, к тормозному цилиндру которых подключены впускной и выпускной вентили, содер жащее связанные с независимо вращаю и имися колесами транспортного средства датчики сигналов угловых скоростей, колес, блок замещения при од новременном юзе всех колес, входы которого сообщейы с выходами датчиков, схему выбора наибольшепо из си налов угловых скоростей, к входам которой : подключены выходы датчиков и блока замещения, вырабатывающий сигнал относительного скольжения первый сумматор, к первому входу ко торого подключен выход схемы выбора наибольшего сигнала, а к второму выход датчика угловой скорости контролируемого колеса, первый пороговый элемент, связанный входом с вых дом, первого сумматора, второй пороговый элемент, вход которого через дифференциатор сообщен с выходом датчика угловой скорости контролируемого колеса, а выход подключен к одному из входов первой схемы совпадения, служащей для управления по отрицательным сигналам выпускным вентилем тормозного цилиндра L1 J. В известном устройстве после антиблокировочного цикла уровень восстанавливаемого давления постоянен и не зависит от величины силы сиеп ления научастке торможения. При по ниженном сцеплении это вызывает непрерывное срабатывание устройства, что уменьшает средний уровень давле ния за период торможения, снижает эффективность торможения и приводит к истощению тормозной системы. В слу чае повышения сцепления на участке торможения, тормозная эффективность транспортного средства не возрастает, а остается неизменной на уровне определяемом величиной установленного давления. 55 Цель изобретения - повышение эффективности торможения и предотвращение истощения тормозной системы. Указанная.цель достигается тем, что устройство для автоматического управления колесными тормозами .по условиям сцепления, к тормозному цилиндру которых подключены впускной и выпускной вентили, содержащее связанные с независимо вращающимися колесами транспортного средства датчики сигналов угловых скоростей колес, блок замещения при одновременном юзе всех колес, входы которого сообщены с. выходами датчиков, схему выбора наибольшего из сигналов угловых скоростей, к входам которой подключены выходы датчиков и яблока замещения, вырабатывающий сигнал относительного скольжения первый сумматор, к первому входу которого подключен выход схемы выбора наибольшего сигнала, а к второму - выход датчика угловой скорости контролируемого колеса, первый пороговый элемент, связанный входом с выходом nepBOf:о сумматора, второй пороговый элемент, вход которого через дифференциатор сообщен с выходом датчика угловой скорости контролируемого колеса, а выход подключен к одному из входов первой схемы совпадения, служащей для управления по отрицательным сигналам выпускным вентилем тормозного цилиндра, снабжено второй схемой совпадения, служащей для управления по положительным сигналам, первый вход которой связан с .выходом первого порогойрго элемента, а выход - с впускным вентилем, связывающим воздухораспределитель с тормозным цилиндром, оборудованным дйтчиком давления, третьей схемой совпадения, служащей для управления, по положительным сигналам, формирователем, третьим пороговым элементом, вход которого соединен с выходом.первой схемы совпадения, а выход подсоединен к второму входу третьей схемы совпадения и к входу формирователя, элементом памяти, управляющий вход которого сообщен с выходом формирователя, а информационный - с выходом датчика давления, вторым сумматором с неизменной уставкой, первый вход которого сообщен с выодом датчика давления, а второй с-выходом элемента памяти,, четвер3тым пороговым элементом, через который выход второго сумматора сооб щается с hepBMM входом третьей схемы совпадения, элементом, задержки во времени, через который выход третьей схемы совпадения сообщен с вторым входом второй схемы совпадения, причем другой вход первой схем совпадения связан с выходом первого порогового элемента. Ни фиг. 1 приведена схема устрой ства; на фиг.2 - временные диаграмм изменения отдельных выходных сигналов блоков. Устройство содержит .связанные с независимо вращающимися колесами транспортного средства датчики 1сигналов угловых скоростей колес, блок 5 замещения при одновременном юзе всех колес, входами связанный с датчиками, схему 6 выбора наибольше го из сигналов угловых скоростей, к входам которой подключены выходы датчиков и блока замещения, вырабатывающий сигнал относительного скол жения первый сумматор 7, к первому входу которого подключен выход схем выбора наибольшего сигнала, а к вто рому - выход датчика угловой скорос ти контролируемого колеса, первый пороговый элемент 8, связанный входом с выходом первого Сумматора, пе вую схему 9 совпадения по отрицател ным сигналам и вторую схему 10 совпадения по положительным сигналам, к первым входам которых подключен выход первого порогового элемента, второй пороговый элемент 11 , вход к торого через дифференциатор 12 сооб щен с выходом датчика контролируемо го колеса, а выход подан на второй вход первой схемы совпадения, установленный на тормозном цилиндре впу Кной вентиль 13 с подведенным к нем давлением от воздухораспределителя и управляемый от выхода второй схемы совпадения, выпускной вентиль 1, управляемый от выхода первой сх мы совпадения и связанный с тормозным цилиндром 15, оборудованным дат ком 1б давления, третий пороговый элемент 17 и сообщенный через него с выходом первой схемы совпадения формирователь 18, элемент 19 памяти управляющим входом связанный с форм рователем 18, а информационным - с датчиком давления, второй сумматор 20, на один вход которого подан 55 неизменный по величине уровень сигнала Л U, второй вход сообщен с выходом датчика давления, а третий с выходом элемента памяти, четвертый пороговый элемент 21, через который второй сумматор сообщается с первым входом третьей схемы 22 совпадения по положительным сигналам, второй вход которой сообщен с выходом третьего порогового элемента, задержку 23 по времени, входом связанную с выходом третьей схемы совпадения, а выходом - с вторым входом второй схемы совпадения и осуществляющую задержку по времени прохождения только положительного фронта сигналаi Для пояснения процессов, протекающих в предлагаемом устройстве при торможе.нии, приведены временные /:иаграммы изменения отдельных, наиболее важных для анализа, выходных сигналов блоков {фиг. 2). При этом на верхнем графике кривой О отображено изменение во времени линейной скорости транспортного средства при торможении; кривой S определяются граничные значения допустимого (неизбыточного) скольжения колеса; кривой -б - одновременное изменение окружной скорости контролируемого колеса при возникновении и ликвидации его блокировки. Восемь нижерасположенных (фиг. 2) временных зависимостей показывают изменение сигналов на выходах следук)щих блоков: кривая i- блока 12; а - 7; 9; с- ь,- 15; - 19; -20. Устройство работает следующим образом. Перед торможением при ускоренном равномерном или замедленном (на выбеге) движении транспортного средства относительное скольжение контролируемого колеса не превышает допустимого, на выходе схемы 6 выбора наибольшего сигнала выделяется максимальный из сигналов, поступающих от датчиков 1-, из которого в первом сумматоре 7 вычитается сигнал датчика контролируемого колеса, а полученная разность, поступающая на вход первого порогового элемента 8, меньшая, при.данных условиях движения, уровня его срабатывания удерживает на его выходе положительный сигнал. Аналогичный положительный сигнал поступает с выхода задержки 23 по времени (фиг. 2). Дифференциатор 12 при ускоренном равномерном или замедленном движении контролируемого колеса вырабатывает на выходе соответственно положительный, нулевой или отрицательный сигналы, которые вызывают н выходе второго порогового элемента 11 в первых двух случаях положитель ный а в третьем - отрицательный уровни. Блоком 5 .замещения вырабаты вается сигнал равный максимальному, поступающему от датчиков I-, при отсутствии одновременной блокировки контролируемых колес и .эталонный сигнал,уменьшаемый постоянной скорос тью,при наличии указанной блокировки Таким образом, перед торможением с выхода схемы 10 совпадения по положительжлм сигналам на впускной вентиль 13 поступает включающий его сигнал, а на выходе схемы совпадения 9 по отрицательным сигналам сиг нал отсутствует, и выпускной вентил И выключен. Давление в тормозном цилиндре 15 равно нулю, также равен нулю и сигнал на выходе датчика 16 давления, В элементе 19 памяти (ран ся информацияО давлении в тормозном цилиндре15, при котором началс процесс развития юза в последнем ци ле предшествующего режима торможения или при опробовании тормозов в пункте отправления транспортного средства. На выходе второго сумматора 20 имеется отрицательный си|- нал равный разности сигналов с выход элемента 19 памяти и выхода датчика 16 давления вместе с постоянным уровнем ли, поданным на первый вход второго сумматора 20, Четвертый поро говый элемент 21 подает при этом на первый вход третьей схемы 22 совпадения- по положительным сигналам отрицательный сигнал, а третий пороговый элемент 17, ввиду отсутствия сигнала на его входе, подает на второй вход этой схемы положительный сигнал, р результате чего на ее выходе присутствует отрицательный си)- нал. При этом с выхода задержки 23 п времени на второй вход второй схемы 10 совпадения снимается положительный сигнал. При торможении сжатый воздух от воздухораспределителя поступает через впускной вентиль 13 в тормозной цилиндр 15, положительный сигнал на выходе датчика. 16 давления растет и, когда он достигает уровня меньшего на ди (по абсолютной величине) отрицательного сигнала, поступающего ОТ элемента 19 памяти, на выходе второго сумматора 20 изменяется полярность напряжения и четвертый пороговый элемент 21 начинает подавать на первый вход третьей схемы 22 совпадения положительный сигнал, Так как с выхода первой схемы 9 совпадения сигнал отсутствует, то третьим пороговым элементом 17 на второй вход третьей схемы 22 совпадения подается положительный сигнал. На выходе последней также формируется положительный сигнал, поступающий на задержку 23- по времени, которая при этом изменяет знак на выходе с.положительного на отрицательный,Вторая схема 10 совпадения прекращает подавать сигнал на впускной вентиль 13 и последний, закрывшись, прекращает доступ воздуха от воздухораспределителя в тормозной цилиндр 15. После выдержки времени t; на выходе задержки 23 по времени сигнал изменяется с отрицательного на положительный и через вторую схему 10 совпадения вновь включается впускной вентиль 13, через который давление воздуха в тормозном цилиндре 15 начинает возрастать. При замедленном вращении колеса через дифференциатор 12 и йторой пороговый элемент 11 на первом входе первой схемы 9 совпадения удерживается отрицательный сигнал. Когда .скольжение контролируемого колеса превысит допустимое, положительный сигнал с выхода первого сумматора 7 станет больше уровня срабатывания первого порогового элемента 8, и последний подает на входы первой схемы 9 и второй схемы 10 совпадения отрицательный сигнал. На выходе первой схемы 9 совпадения си|- нал появляется, а на выходе второй 10 - исчезает. При этом впускной вентиль 13 выключается, срабатывают выпускной вентиль It, третий пороговый элемент 17., изменяющий сигнал на выходе с положительного на отрицательный, формирователь 10, подающий короткий импульс перезаписи на управляющий вход элемента 19 памяти. в последнем регистрируется новая величина давления воздуха, При которой наступила блокировка колеса. С выход третьей схемы 22 совпадения на вход :задержки 23 по времени поступает отрицательный сигнал, который не изменяет положительного сигнала на ее выходе. Через выпускной вентиль Т давление в тормозном цилиндре 15 понижается, сигналы на выходах второго сумматора 20 и четвертого порогового элемента 21 становятся отрицательными. Когда контролируемое колесо переходит от замедленного к ускоренному вращению, сигнал на выходе порогового элемента 11 изменяется на положительный, а на выходе первой схемы 9 совпадения сигнал исчезает. Выпускной вентиль k вы лючается и наступает состояние перекрыши. Третий пороговый элемент 17 меняет знак на своем выходе с отрицательного на положительный, однако сигнал с выхода третьей схемы 22 совпадения остается отрицательным за счет удержания его четвертым пороговым элементом 21. При прекращении избыточного сколь жения контролируемого колеса знак на выходе первого порогового элемента 8 становится положительным. При том на выходе второй схемы 10 совпа дения формируется сигнал и срабатывает впускной вентиль 13, через кото рый давление в тормозном цилиндре начинает возрастать. Когда положительный сигнал с выхода датчика 16 давления достигает величины меньшей (по абсолютному значению) на U отрицательного сигнала, поступающего от элемента 19 памяти, на выходах второго сумматора 20 и четвертого .порогового элемента 21 формируются положительные сигналы. На выходе третьей схемы 22 совпадения знак меняется с отрицательного на положительный и некоторое время , не пропускается на второй вход второй схемы 10 совпадения задержкой 23 по врем.ени, за счет чего впускной вентиль 13 на этот период окажется выключенным. По истечении выдержки времени работа устройства повторяется так, как описано выше. Если в процессе выдержки времени Т-х, или в любое другое время контролируемое колесо из-за понижения силы сцепления войдет в блокировочное состояние, то предлагаемое устройство через элемент 19 памяти зарегистрирует величину давления, при котором скольжение стало чрезмерным, а затем, осуществив антиблокировочный цикл, в соответствии с описанным выше, установит давление несколько меньшим (на&Р) того, при котором возникла блокировка. Через времяТ- это давление вновь нарастает до появления избыточного скольжения и т.д. Таким образом, данное устройство позволяет периодически, на каждом участке торможения устанавливать давление в тормозных цилиндрах транспортного средства в соответствии с силой сцепления и, тем самым, реализовать тормозную эффективность близкую к максимально возможной для колесного тормоза в данных условиях движения. Это дает возможность использовать силы сцепления при торможении, ограниченные в на11более широко применяемых тормозах заранее установленным максимальным рассчитанным на безъюзовое торможение, значением тормозной силы.
h
12
r/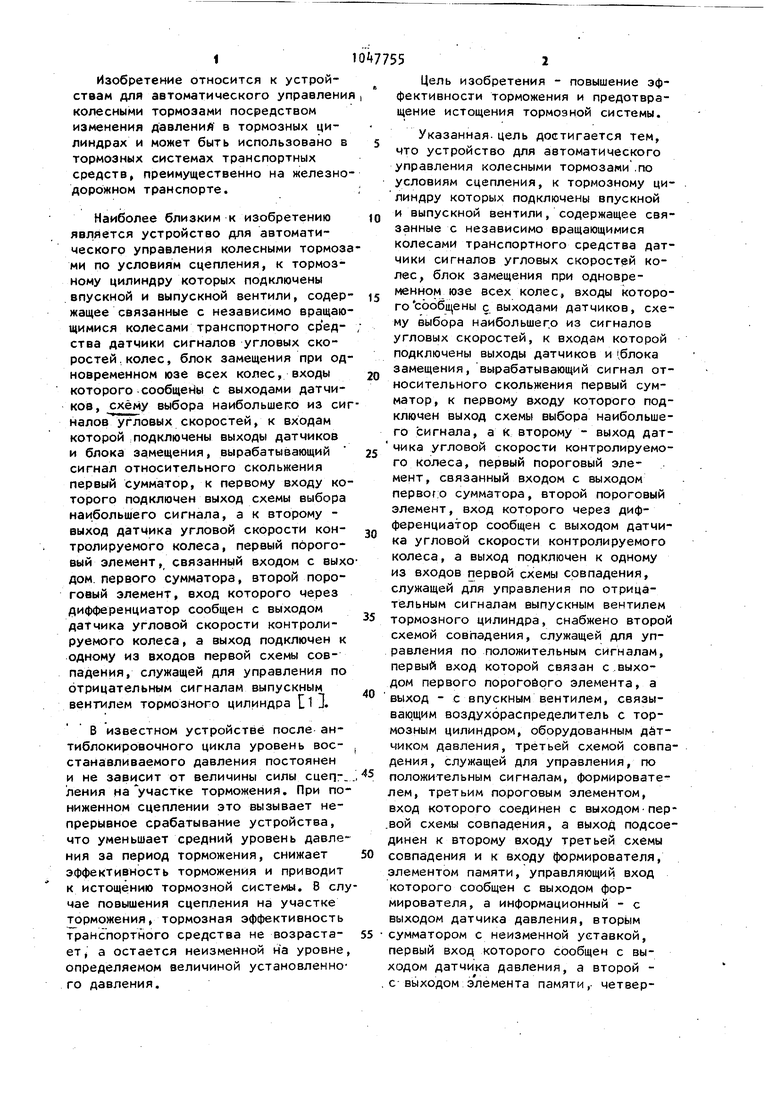
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования колесного тормоза по условиям движения | 1987 |
|
SU1505811A1 |
| Способ отпуска пневматических автоматических тормозов железнодорожного подвижного состава | 1987 |
|
SU1493516A1 |
| Устройство для выявления юза колес транспортного средства | 1980 |
|
SU935329A1 |
| Антиблокировочное устройство управления колесным тормозом | 1980 |
|
SU874420A1 |
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2037635C1 |
| Тормозной привод колес ведущего моста транспортного средства | 1989 |
|
SU1659259A1 |
| Система управления торможением транспортного средства | 1987 |
|
SU1416349A1 |
| Система тормозного управления железнодорожного транспортного средства | 1987 |
|
SU1428633A1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ЮЗА ТОРМОЗЯЩЕГО КОЛЕСА | 2003 |
|
RU2237587C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОЛЕСНЫМИ ТОРМОЗАМИ ПО УСЛОВИЯМ СЦЕПЛЕНИЯ, к тормозному цилиндру которых подключены впускной и выпускной вентили, содержащее связанные с независимо вра.щающимися колесами транспортного средства датчики сигналов угловых , скоростей колес, блок замещения при одновременном юзе всех колёс, входы которого сообщены с выходами датчиков, схему выбора наибольшего из сигналов угловых скоростей, к входам которой подключены выходы датчиков и блока замещения, вырабатывающий сигнал относительного скольжения первый сумматор, к первому входу которого подключен выход схемы выбора наибольшего сигнала, а к второму - выход датчика угловой скорости контролируемого колеса, первый пороговый элемент, связанный входом с выходом первого сумма тора, второй пороговый элемент,вход которого через дифференциатор сообщен с выходом датчика угловой скорости контролируемого колеса, а выход подключен к одному из входов пери вой схемы совпадения, служащей для управления по отрицательным сигналам выпускным вентилем тормозного цилиндра, отличающееся тем, что, с целью повышения эффективности торможения и предотвращения истощения тормозной системы, оно снабжено второй схемой совпадения, служащей для управления по похюжительным c.ii- налам , первый вход которой связан с выходом первого порогового элемента, а выход - с впускным вентилем, связывающим Ёоздухораспределитель с тормозным цилиндром, оборудованным датчи ком давления, третьей схемой совпадения, служащей для управления по положительным сигналам, формировате(Л лем, третьим пороговым .элементом, вход которого соединен с выходом первой схемы совпадения, а выход подсоединен к второму входу третьей схемы совпадения и к входу формирователя, элементом памяти, управляющий вход которого сообщен с 1 выходом формирователя, а информационный - с выходом датчика давления, вторым сумматором с неизменной уставкой, первый вход которого сооб- СП СП щен с выходом датчика давления, авторой - с выходом элемента памяти, четвертым пороговым элементом, через который выход второго сумматора сообщается с первым входом третьей схемы совпгдения, элементом задержки во времени, через который выход третьей схемы совпадения сообщен с вторь1м входом второй схемы совпадения, причем д|5угой вход первой схемы совпадения связан с выходом первого порогового элемента.
|Z//// IfUJUyAk
fui.l/Iи men я
