СП
о ел
00
315
ровочный узел, вырабатывающий на выходе управляющий сигнал при возникновении избыточного скольжения колес и понижающего при этом, посред- ством быстрого уменьшения давления рабочей среды в тормозном цилиндре 22, тормозное нажатие для предупреждения блокировки (юза) колеса, снабжено углом корректировки максималь- ной величины необходимого для реализации экстренного торможения давления рабочей среды Р цилиндре 22. Узел корректировки содержит блок 20 сравнения с двумя выходами, один из которых через элемент ИЛИ 23 воздействует на выпускной вентиль 24, со14
общенный с цилиндром 22, а другой через элемент ЗАПРЕТ 25 - на впускной вентиль 26. Блок 20 сравнения сопоставляет величины сигнала от датчика 21 давления и сигнала, вырабатываемого сумматором 18, на входы которого через функциональные преобразователи 17, 19 поступают сигналы от датчика 16 загрузки транспортного средства и схемы 6 выделения наибольшего из сигналов угловых скоростей колес. Узел корректировки по управляющему входу элемента ЗАПРЕТ 25 выключается 1нтиблокит овочным узлом в случае возникновения опасности блокировки колес тормозами. 1 ил.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления колесными тормозами по условиям сцепления | 1982 |
|
SU1047755A1 |
| Устройство для выявления юза колес транспортного средства | 1980 |
|
SU935329A1 |
| Устройство для выявления юза и боксования колес транспортного средства | 1984 |
|
SU1230877A1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| Система автоматического регулирования скольжения колес транспортного средства в тормозном режиме | 1982 |
|
SU1239001A1 |
| Противоюзная система железнодорожного вагона | 1985 |
|
SU1306771A1 |
| Устройство для выявления юза и буксования колес транспортного средства | 1983 |
|
SU1098839A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПРОСКАЛЬЗЫВАНИЯ КОЛЕСНЫХ ПАР ПРИ ТОРМОЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2021 |
|
RU2770941C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
Изобретение относится к устройствам автоматического управления колесными тормозами транспортных средств. Цель изобретения - повышение эффективности торможения. Устройство, включающее в себя антиблокировочный узел, вырабатывающий на выходе управляющий сигнал при возникновении избыточного скольжения колес и понижающего при этом, посредством быстрого уменьшения давления рабочей среды в тормозном цилиндре 22, тормозное нажатие для предупреждения блокировки (юза) колеса, снабжено узлом корректировки максимальной величины необходимого для реализации экстренного торможения давления рабочей среды в цилиндре 22. Узел корректировки содержит блок 20 сравнения с двумя выходами, один из которых через элемент ИЛМ 23 воздействует на выпускной вентиль 24, сообщенный с цилиндром 22, а другой через элемент ЗАПРЕТ 25 - на впускной вентиль 26. Блок 20 сравнения сопоставляет величины сигнала от датчика 21 давления и сигнала, вырабатываемого сумматором 18, на входы которого через функциональные преобразователи 17, 19 поступают сигналы от датчика 16 загрузки транспортного средства и схемы 6 выделения наибольшего из сигналов угловых скоростей колес. Узел корректировки по управляющему входу элемента ЗАПРЕТ 25 выключается антиблокировочным узлом в случае возникновения опасности блокировки колес тормозами. 1 ил.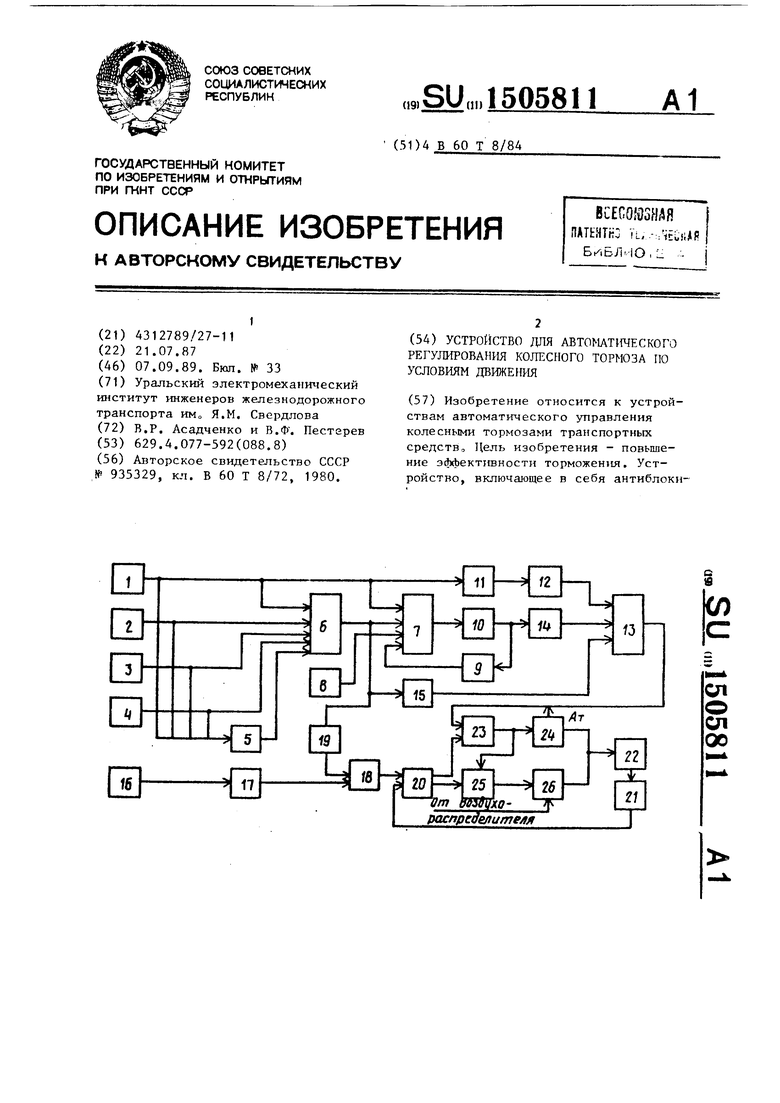
Изобретение относится к средствам автоматического управления тормозами транспортных средств посредством изменения давления рабочей среды в тормозньк цилиндрах колесного тормоза в соответствии с характеристиками текущих условий движения транспортного средства и может быть использовано в тормозных системах, преимущественно на железнодорожном транспорте.
Цель изобретения - повышение эффективности торможения
На чертеже приведена блок-схема устройства.
Устройство для автоматического регулирования колесного тормоза по условиям движения содержит связанные с независимо вращающимися колесами транспортного средства датчики 1-4 сигналов угловых скоростей колес, выходы которых подключены к соответсвующим входам блока 5 замещения при юзе всех колес и схемы 6 выделения наибольшего из сигналов угловых скоростей колес, причем выход блока 5 также подсоединен к одному из входов схемы 6.
Выход датчика 1 скорости контроли руемого колеса подключен к первому (вычитаемому) входу первого сумматора 7 , к второму (суммирующему) входу которого подсоединен выход схемы 6 вьщеления наибольшего из сигналов, к третьему (суммирующему) входу - выход генератора 8 импульсов, а к четвертому (вычитающему) - выход интегратора 9, связанного входом
с выходом первого порогового элемента 10.
Вход первого порогового элемента
10соединен с выходом первого сумматора 7. Выход датчика 1 скорости контролируемого колеса через последовательно соединенные дифференциато
11и дискриминатор 12 подключен к первому управляющему входу схемы 13 совпадения, вырабатывающей сигнал юза. Выход первого порогового элемента 10 через элемент 14 задержки подсоединен к второму входу схемы 13 совпадения, третий вход которой через второй пороговый элемент 15 связан с выходом схемы 6 выделения наибольшего из сигналов.Выход датчика 16 загрузки транспортного средства через первый функцио- нальньй преобразователь 17 подключен к первому входу дополнительного сумматора 18, к второму входу которого через второй функциональный преобразователь 19, воспроизводящий зависимость сцепления контролируемого колеса от скорости, подключен выход схемы 6 выделения наибольшего из сигналов угловых скоростей колес. Выход дополнительного сумматора 18 подсоединен к первому входу трехпо- зиционного блока 20 сравнения, к второму входу которого подключен своим выходом датчик 21 в тормозном цилиндре 22.
Выход схемы 13 совпадения и инверсный выход трехпозиционного блока 20 сравнения подключен к входам элемента ИЛИ 23, выход которого свя3
gaH с электрическим входом выпускног вентиля 24 и управляюрдим входом элемента ЗЛПРР Т 25. Прямой выход трех- ПОЗИЦ1ЮННОГО блока 20 сраннеиия подсоединен к информационному входу элемента ЗАПРЕТ 25, выход которого связан с электрическим входом впускного вентиля 26, сообп1енного своим пневматическим входом с воздухораспределителем (не показан), а выходом наряду с выходом выпускного вентиля 24 - с тормозным Ц1-ШИНДРОМ 25.
Устройство работает следующим образом.
При движении транспортного средства датчики 1-4 сигналов угловых скоростей колес вырабатывают сигналы, пропорциональные значениям угловым скоростей колес. В блоке 5 замещения формируется эталонный сигнал, соответствующий угловой скорости снижени вращения колес без юза. Схемой 6 выделения наибольшего из сигналов выявляется максимальный из сигналов, поступающих от датчиков 1-4 и блока 5 замещения. Этот сигнал подается на первый сумматор 7, где из него вычитаются сигнал от датчика 1 угловой скорости контролируемого колеса и сигнал, формируемый на выходе интегратора 9. Сумматором 7 суммируются импульсы, поступающие от генератора 8. При срабатывании первого пор гового элемента 10 включается элемент 14 задержки и не пропускает поступающий сигнал на схему 13 совпадения в течение времени Т задержки, необходимого для срабатьшания испол- нительного механизма (тормозного цилиндра) . Одновременно с сигналом первого порогового элемента 10 включается интегратор 9, вырабатьшающий нарастающее напряжение, что приводит к уменьшению разности сигналов на выходе первого сумматора 7 и выключению первого порогового элемента 10. При этом выключается и элемент 14 задержки. Сигнал на выходе интегратора 9 начинает убьшать, по сигналу первого сумматора 7 вновь включается первый пороговый элемент 10, повторяя описанный цикл работы устройства при движении транспортного средства без юза. Скорость интегрирования выбирается равной наибольшей возможной скорости изменения разности сигналов на выходе схемы 6 выделения наибольшего из сигналов и сиг11
нала датчика 1 пр) днижег ки кплсс без юза. Время Т 1лде1-)жки -элемента 14 задержки устапаплияаетс-я Оопьше максимальной длительности сигналов, поступающих от гсерпого порогового элемента 10 при наибольшей скорости увеличения разности названных сигналов в отсутствии юза.
Одновременно при движении (как и на стоянке) датчик 16 загрузки транспортного средства вырабатывает сигнал, пропорциональный гесу (заг .уз- ке;) транспортного средства л поданаемый на первый функциональный преобразователь 17 воспроизведения функциональной зависимости силы сцепления от загрузки для коррекции павле- ния в тормозе по загрузке и ре.-ализуклдкй заданную зависимость сцепления в функции загрузки, которая определяет уровень максимального (в отсутствие юза) давления в тормозном цилиндре конкретной тормозной системы при разлггчных зпгрузке и скорости транспортного средства. Зависимость необходимого изменения давления в тормозном цилиндре при изменении скорости движения формирует второй функциональный преобразователь 19 воспроизведения функциональной зависимости силы сцепления от скорости (коррекция давления по скорости). На выходе дополнительного
с мматора вырабатьшается сигнал, соответствующий необхощтмому для полного (экстренного) торможения давлению в тормозном цилиндре, соответствующему загрузке и скорости
движения транспортного средства.
Трехпозиционный блок 20 сравнения имеет прямой выход, воздействующий через информационный вход элемента ЗАПРЕТ 25 на впускной вентиль
26, и инверсный выход, воздействующий через элемент ИЛИ 23 на выпускной вентиль 24, Сигнал управления на прямом выходе трехпозиционного блока 20 сравнения появляется в том
случае, когда сигнал требуемого
(с выхода дополнительного сумматора 18) давления больше, чем сигнал фактического (от датчика 21) давления, при этом на инверсном выходе сигнал
равен нулю. Когда сигнал требуемого давления меньше сигнала фактического давления, появляется сигнал на инверсном выходе блока 20, а на прямом пропадает, В случае равенства
сигналов требуемого и фактического давлений сигналы на обоих выходах блока 20 отсутствуют. В отсутствии торможения давление в тормозном цилиндре 22 и сигнал на выходе датчика 21 давления равны нулю. Так как в этом случае сигнал с вьпсода дополнительного сумматора 18 больше сигнала датчика 21 давления, с выхода трех- позиционного блока 20 сравнения через элемент ЗАПРЕТ 25, открытый по управляющо,м-/ входу, поступа.т включающий впускной вентиль 2в, и :тормозной цилиндр 22 сообщается с возду: ораспределителем или другим источником давления.
Так как в отсутствие торможения на выходе схемы 13 совпадения отсутствует сигнал (юза), то обнуленный по обоим входам элемент ИЛИ 23 на выходе также имеет нулевой уровень, выпускной вентиль 24 при этом остается закрытым, а элемент ЗАПРЕТ 25 пропускает сигнал включения впускного вентиля 26.
При торможении, в отсутствии юза, давление сжатого воздуха от воздухораспределителя поступает через включенный вп скной вентиль 26 в тормозной цилиндр 22.
В случае регулировочного торможения (в отсутствие юза) давление в тормозном цилиндре 22 устанавл1шает- ся равным заданному воздухораспределителем, при этом впускной вентиль 26 остается включенным, а выпускной вентиль 2А закрытым, так как сигнал от датчика 21 остается меньшим сигнала требуемого давления с выхода дополнительного сумматора 18.
При задании полного (или экстренного) торможения давление в тормозном цилиндре растет и сигнал датчика 21 увеличивается, как только он сравняется с сигналом требуемого давлений, сигнал на прямом выходе блока 20 становится равным нулю и впуск- иой вентиль 26 также закрывается. При изменении условий движения сигнал требуемого давления на выходе дополнительного сумматора 18 изменяется. При его уменьшении трехпози- ционный блок 20 сравнения изменяет состояние инверсного выхода. На вход элемента ИЛИ 23 поступает сигнал, включается управления элемента ЗАПРЕТ 25, запрещая включение впускног
0
5
0
5
0
5
0
5
С
5
го вентиля 26 и наполнение тормозного цилиндра 22. В то же время элемент 23 включает впускной вентиль 24 и давление в тормозном цилиндре 22 уменьшается до требуемого, после чего выпускной вентиль 2А снова за- крьгаается. При других изменениях условий движения сигнал требуемого давления, например, увеличивается и становится больше сигнала фактичес кого давления. Пги этом v-.-.к 20 сраг;- 1 ени изменяет согтоиние иыходов: его инверсный Bf-ход обнуляет (при отсутствии юза) элемент ИЛИ / и снимает сигнал запрета, а прямой выход через информационный вход элемента ЗАГЛ ЕТ 25 включает впускной йентиль 26 Давление в тормозном цилиндре 22 повышается, пока не достигнет требуемого, поело чего прямой вы- koд блока 20 также, обнуляется и повышение прекращается.
Таким образом, при торможении в отсутствие юза давление в тормозном цилиндре 22 устанавливается в соответствии с условиями движения; загрузкой транспортного средства ц его скоростью.
При торможении транспортного средства в случае развития юза значение разности между сигналами на выходах схемы 6 и датчика 1 возрастает со скоростью, большей скорости интегрирования интегратора 9. Поэтому при превьш1ении сигналом на выходе первого сумматора 7 порогового уровня несмотря на формирование на выходе интегратора 9 возрастающего сигнала сигнал на выходе первого сумматора. 7 продолжает увеличиваться и первьй пороговый элемент 10 устойчиво находится во включенном состоянии. По истечении времени Т с выхода элемента 14 задержки на вход схемы 13 совпадения поступает сигнал о выявлении юза.
При замедлении колеса в процессе развития юза подключенный к датчику 1 угловой скорости дифференциатор 11 вырабатьшает сигнал, пропускаемый дискриминатором 12 на схему 13 совпадения. При скорости движения более 10 км/ч сигнал с выхода схемы 6 становится больше уровня срабатывания второго порогового элемента 15 и с выхода последнего на вход схемы 13 совпадения также поступает сигнал. При одновременном поступлении сигналов от дискриминатора 12, элемента 14 задержки и второго порогового элемента 15 на входы схемы 13 совпадения последняя вырабатьгаает на выходе сигнал управления (наличия юза), включающий через элемент ШШ 23 выпускной вентиль 24 и закрывающий элемент ЗАПРЕТ 25, исключающий включние впускного вентиля 26 (или выкпю- чающую его, если он бьш включен блоком 20 сравнения),
Давление в тормозном цилиндре 22 уменьшается и в мбмент перехода ко- леса от замедленного к ускоренному вращению изменяется знак производной угловой скорости на выходе дифференциатора 11, что препятствует поступлению сигнала от дискримннато- ра 12 на вход схемы 13 совпадения до тех пор, пока контролируемое колесо ускоряется. При этом запрет снимается и так как уровень давления в тормозном цилиндре 22 оказывается ниже заданного сигналом на выходе дополнительного сумматора 18, выпускной вентиль выключается, а через откры- йый по управляющему входу элемент ЗАПРЕТ 25 по информационному входу включается впускной вентиль 26, по- вышая давление в тормозном цилиндре 22 до требуемого. При повторном воз никновении юзового состояния описанный цикл работы устройства повторяется.
С понижением скорости движения транспортного средства перед остановкой сигнал с выхода схемы 6 становится меньше уровня срабатывания второго порогового элемента 15, сигнал на его выходе исчезает и схема 13 совпадения закрывается, блокируя выработку сигнала управления о возможном юзе. При этом давление в тор- мозном цилиндре 22 корректируется с изменением скорости транспортного средства.
Таким образом, устройство позволя ет устанавливать в тормозном цилиндре давление в соответствии с загрузкой и скоростью транспортного средсва, обеспечивает антиблокировочный цикл торможения, позволяет повысить величину нажатия тормозных колодок при противоюзном регуляторе, не приводя к его частым срабатываниям и истощению тормозной системы.
)0
рмула изобретения
5 0 0
д
.
5
Устройство для автоматического регулирования колесного тормоза по условиям движения, содержащее тормозной цилиндр, подключенные к нему впускной и вьшускной вентили, связанные с независимо вращающимися колесами транспортного средства датчики сигналов угловых скоростей колес, блок замещения при одновременном всех колес, входы которого cocCff: с выходами датчиков, схему вьще: ения наибольшего из сипгалов угловые ростей, к входам которой подключены выходы датчиков и блока замещения, первый сумматор, к первому входу которого подключен выход датчика угловой скорости контролируемого колеса, к второму - выход схемы вьщеления наибольшего сигнала, к третьему - выход генератора импульсов, а к четвертому - выход интегратора, связанного входом с выходом первого порогового элемента, вход которого соединен с выходом первого сумматора, дифференциатор, вход которого сообщен с датчиком угловой скорости контролируемого колеса, а выход через дискриминатор подключен к первому входу схемы совпадения, к второму входу которой черея элемент задержки подключен выход первого порогового эле- мента а третий вход схемы совпадения через второй пороговый элемент подключен к выходу схемы выделения наибольшего из сигналов, отличающееся тем, что, с целью повьш1ения эффективности торможения, оно снабжено датчиком загрузки транспортного средства, двумя функциональными преобразователями, дополнительным сумматором, трехпозиционным блоком сравнения, датчиком давления в тормозном цилиндре, элементом ИЛИ и элементом ЗАГП ЕТ, причем выход датчика загрузки соединен с входом первого функционального блока, воспроизводящего заданную зависимость силы сцепления от загрузки, выходом связанного с одним из входов дополнительного сумматора, второй функциональный блок, воспроизводящий заданную зависимость силы сцепления от скорости, подключен входом к выходу схемы выделения наибольшего из сигналов, а выходом - к второму входу дополнительного сумматора, выход
ч150581112
которого соединен с первым входома выходом соединен с электрическим
трехпозиционного блока сравнения,входом вьшускного вентиля и управлявторым входом связанного с выходомищим входом элемента ЗАПРЕТ, через
датчика давления, элемент ИЛИ первымкоторый второй выход трехпозиционвходом связан с выходом схемы совпа ного блока сравнения подключен к
дения, вторым - с одним из выходовэлектрическому входу впускного вентрехпозиционного блока сравнения,тиляо
| Устройство для выявления юза колес транспортного средства | 1980 |
|
SU935329A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
