Изобретение относится к электротехнике и предназначено для примеения преимущественно в системах озиционного управления испытательыми стендами.
Известны программные позиционные атчики, состоящие из корпуса с закрепленными в нем микровыключатеями, рычажно-кулачкового механиза и задающего механизма, содержаего вал с жестко закрепленными на нем зубчатыми дисками, дисками с азами и барабаны, кинематически связанные с зубчатыми дисками.
Недостаток устройств заключается том, что для смены программы (переналадки) необходима частичная разборка устройства и смана барабанов.
Известен также программный позиционный датчик, содержащий корпус с закрепленными на нем ком1-1утационнымн элементами, рычажно-кулачковый еханизм и задающий механизм, который состоит из вала с пазом, ряда закрепленных на нем с помощью гайки А буртика групп, каждая из которых состоит из диска, шестерни и кольца, 4 установленных между группами разелительных шайб с выступами, расположенными в пазу вала.
Недостаток известного устройства - низкая точность , вызываемая изменением положения дисков отрегулированных уже групп в процессе регулировки последующих очередных групп в пределах зазоров между выступами разделительных шайб в пазу вала.
Цель изобретения - повышение, точности устройства.
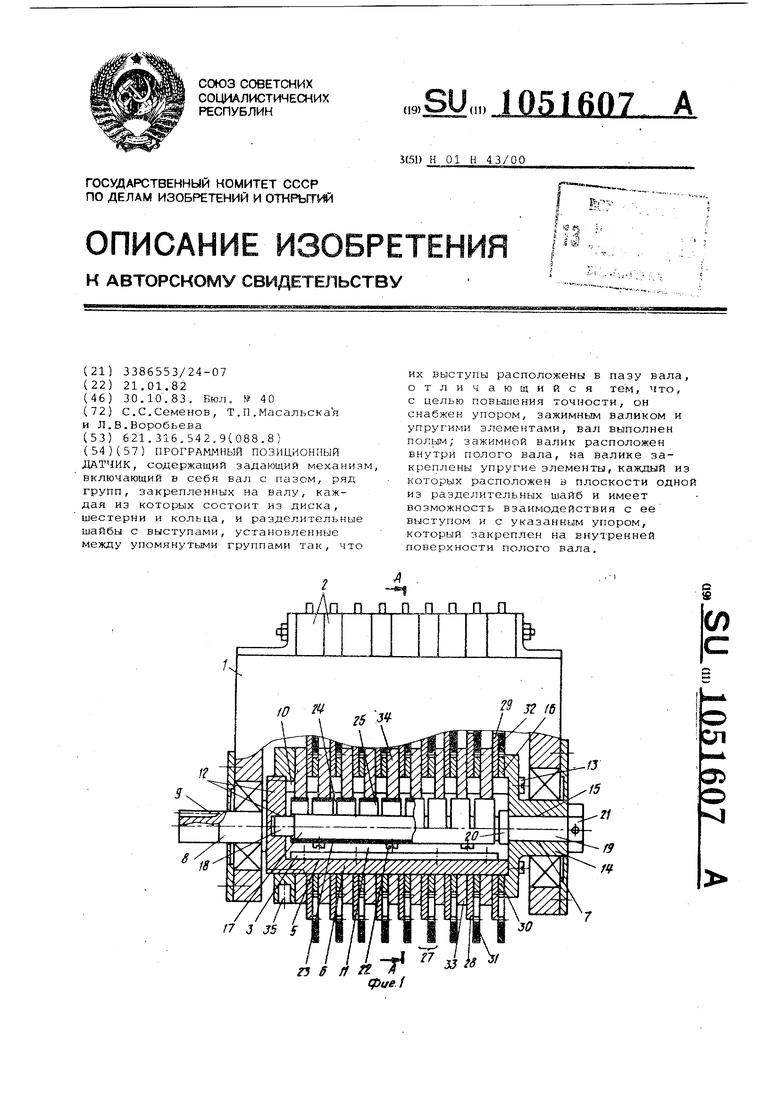
Указанная цель достигается тем, что в программном позиционном датчике, содержащем задающий механизм, состоящий из вала с пазом, ряда закепленных в нем групп, каждая из которых состоит из диска, шестерни и кольца, и,установленных между группами разделительных шайб с выступами, расположенными в пазу вала, вал выполнен с осевой полостью, опорой и закрепленной на нем насадкой, имеющей цапфу и вторую опору, в полости вала на опорах установлен со свободой вращения зажимной валик с цапфами, головкой под ключ и с закрепленной на нем трубкой с прорезями и упругими элементами, каждый из которых расположен в плоскости соответствующей разделительной шайбы, а на внутренней поверхности полости вала закреплен упор.
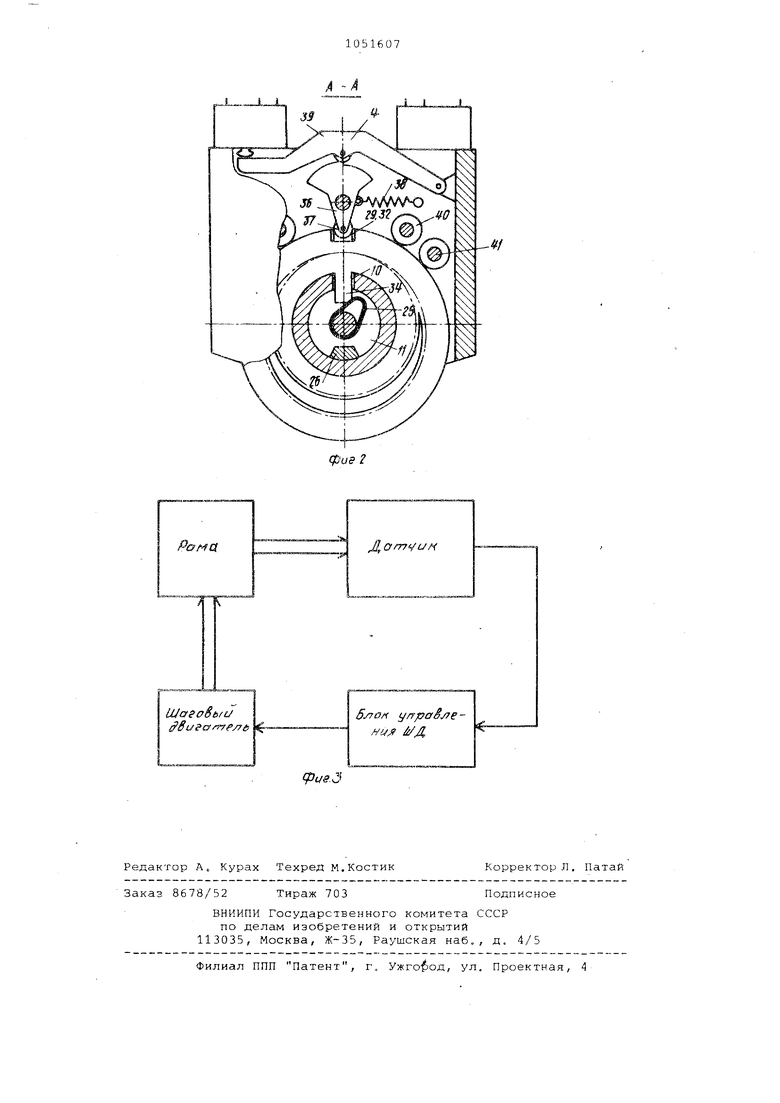
На фиг. 1 представлен программный позиционный датчик, вид с частичным разрезом; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - блочная схема управления рамой стенда.
JJ корпусе 1 (фиг. 1 и 2) закреплены микропереключатели 2 и установлены задающий механизм 3 и рычажно-кулачковый механизм 4, Вал 5 задающего механизма 3 состоит из центральной части 6 и насадки 7. Центральная часть б вала 5 имеет цапфу 8 с нарезанной на ней трубкой 9, паз 10, цилиндрическую полость 11 и опору 12 1асадка 7 закреплена на торце центральной части б вала 5 винтами 13, Насадка 7 имеет цапфу 14 с внутренней опорой 15 и фланец 16. В цилиндрической полости 11 на опорах 12 и 15 установлен со свободой вращения зажимной валик 17 с цапфами 18 и 19 и буртиком 20, На цапфе 19 закреплена головка 21 под ключ. На зажимном валике 17 закреплены винтами 22 трубка 23 с п хэрезями -24 и упругими элементами 25, В полости 11 на внутренней поверхности центральной части 6 вала 5 закреплен упор 26 с помощью винтов (не показаны), Н.а наружной цилиндрической поверхности центральной части 6 вала 5 устан.овле ряд групп 27, каждая из которых состоит из диска 28 с пазами 29, шестерни 30 и колец 31 с пазами 32 и зубчатым венцом с внутренними зубцами. Между группами 27 установлены разделительные шайбы 33 с выступами 34, располагающимися в пазу 10. Трубка 23 установлен-а на зажимном валике 17 таким образом, что каждый из упругих элементов 25 взаимодействует с соответствующим выступом 34, Диски 28 и шестерни 30 всех групп 27 и разделительные шайбы 33 закреплены на валу 5 с помощью .гайки 35 и фланца 16 насадки 7.
На фиг. 2 показаны кулачок 36 с роликом 37 и пружиной 38 и толкатель 39 .рычажно-кулачкового механизма 4, осуществляющие кинематическую связь пазов 29 дисков 28 с приводными элементами микропереключателей 2, а также центрирующие ролики 40 с орями 41 задающего механизма 3,
Рама поворотного стенда (фиг. 3) соединена с валом 5 (фиг. 1) программного позиционного датчика. .Каждый микропереключатель датчика соединен с блоком управления шагового двигателя, который в свою очередь соединен с шаговым двигателем, являющимся исполнительным двигателем в приводе рамы поворотного стенда.
Перед эксплуатацией датчик подвергают настройке на заданную программу значений фиксированных углов (позиций) рамы поворотного стенда.
Настройку производят следующим образом.
Раму поворотного стенда (фиг. 3) устанавливают в заданное по программе угловое положение, контролируя точность занимаемого ею положения с помощью внешних измерительных средств.
С помощью ключа, соединенного с головкой 21, поворачивают зажимной
валик 17 по часовой стрелке, если смотреть со стороны трубки 9 (фиг. 1 до тех пор, Пока упругие элементы 25 трубки 23 не встретятся с упором 26. При ЭТОМповорот зажимного валика 17 прекратится. Придерживая ключом в этом положении зажимной валик 17, другим ключом ослабляют затяжку гайки 35 настолько, чтобы диски 28 можно было поворачивать с помощью соответствующего инструмента. Сняв ключи, поворотами диска 28 и кольца 31 той группы, которая управляет микропереключателем, соответствующим выбранной по программе .позиции, устанавливают диск 28 и кольцо 31 в такое положение, при котором пазы 29 и 32 совпадают, ролик 37 кулачка 36 состоит в зацеплении с пазом диска 29. (фиг. 2), а микропереключатель срабатывает. Снова вставляют соответствующие ключи на головку 21 и в отверстие гайки 35, поворачивают ключом головку 21 против частовой стрелки до соприкосновения упругих элементов 25 с выступами 34 разделительных шайб 33 и, удерживая зажимной валик 17 неподвижным, затягивают до отказа гайку 35. При этом сначала под действием усилия, передаваемого от гайки 35 на вал 5, выбирают зазОры между левой (фиг. 2) стенкой паза 1.0 и выступами 34 разделительных шайб 33, удерживаемых упругими элементами 25, и затем зажимают все диски 28, шестерни 30 и разделительные шайбы 33 между фланцем 16 и гайкой 35. Проверяют соответствие положения рамы стенда в момент срабатывания микропереключателя, заданному программой положению. Для этого включают; систему (фиг. 3). При подаче команды (напряжения) на микропереключатель , соответствующий заданной позиции, с контактов микропереключателя на блок управления поступает сигнал, несущий информацию о наличии рассогласования и о знаке. Блок управления в соответствии с Полученной информацией включает шаговый 5 двигатель, обеспечивая перемещение рамы и находящихся с ней в кинематической связи вала 5, диска 28 с пазом 29, кулачка 36 с роликом 37, толкателя 39 и, наконец, приводного
0 элемента микропереключателя 2 до тех пор, пока не сработает микропереключатель и по его сигналу не отключится шаговый двигатель.
Если, фактическое положение рамы
5 после остановки шагового двигателя отличается от заданного на величину, превышающую допустимую, то указанную регулировочную операцию повторяют, каждый раз поправляя положение
Q паза 29 диска 28 до тех пор, пока расхождение между фактическим положением рамы стенда и згщанным не будет в допуске, после чего приступают к регулировке следующей группы.
В предлагаемом устройстве при
5 последующей регулировке других групп положение дисков 28 отрегулированных групп, от которых зависит сохранение достигнутой при регулировке точности, сохраняется неизменным, так как
0 выступ 34 разделительной шайбы 33 постоянно остается прижатым к одной |Стенке паза 10.
Таким образом, исключается влия5 ние зазора между выступом 3,4 разделительной шайбы 33 и пазом 10 вала 5 на точность выдачи датчиком сигналов.
Эффективность устройства зак.пючается в повьпиении точности датчика за счет исключения погрешностей,
порождаемых зазорами между выступами разделительных шайб и стенками паза вала датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное коммутационное устройство | 1978 |
|
SU748539A1 |
| Испытательный стенд | 1989 |
|
SU1760326A1 |
| Стенд для сборки и вращения тяжелове ных цилиндрических изделий в процессе сварки | 1973 |
|
SU518310A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Программное коммутационное устройство | 1977 |
|
SU748537A1 |
| Установка для изготовления пакетов из термопластичных пленочных материалов | 1988 |
|
SU1565715A1 |
| Лентопротяжное устройство к машине для печати на пленке | 1975 |
|
SU551230A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| Рельсосверлильный станок | 1989 |
|
SU1712517A1 |
Ромц
Шаеовыи eLf afrfp/ft
М,
yfrpaS e€hUJ &/Д.
