о :п
N3 ND N5 ЭО
. Изобретение относится к медицинской технике, а именно к протезированию и: протезостроению, и может быть использовано в протезах предплечья, плеча и после вычленения в плечевоМ, суставе.
. Известна пластмассовая искусственная кисть, содержащая корпус,. первый палец, блок второго-пятого пальцев, оси, пружину схвата, Еилча; ги, блок и гибкую тягу. Механизм
схвата представляет собой шарнирный шестизззенник, позволякя:шй осущест влять активное раскрытие пальцев .
и пружинный схват ij .
Известна также искусстйенная. кисть каркасиого типа с М(еханизмом дожатия планетарного типа, содержащая эластичную оболочку, корпус/ первый палед и блок второго-третьего пальт;ев, соединейних с корпусом осями. На одной оси с блоком второготретьего пальцев установлен блок четвертого-пятого пальцев, имеющий . штифт и поджатый к блоку второготретьего пальцев пружиной. Штифт служит для фиксации блока четверто- . го-пятого пальцев в различных положениях относительно блока второготретьего пальцев. Первый палец имеет два рычага. Один рычаг ширнирно соединен тЯговым рычагом с блоком
.второго-третьего пальцев, а другой .связан промежуточным рычагом с во- . дилом, выполненным в виде коромысла, установленного на неподвижном зуб,чатом секторе, закрепленном в корпу се. На концы водила с помсмдьюоси j; закреплен зубчатьай сателлит,..находящийся в зацеплении с зубчатым сектЬром, причем, к сателлиту присоединена гибкая тяга и конец пружины схвата. Второй конец пружины схвата присоединен к корпусу кисти 2 ,
Недостатками указанных искусственных .кистей являются йевозможность перемещения пальцев и йлавного регулирования этого усилия при взятии предметов с четким разделением фаз захвата, удержания и дожатия. Эти ; недостатки обусловлены тем, что пружина схвата одновременно выполняет и функцию дожатия.
Цель изобретения - обеспечение равномерности, силы схвата во всем диапазоне перемещения Пальцев и возможности плавного ее рег лирО,.вания - , . : .,,
Поставленная цель: достигается тем, чтр в искусственной кисти, дерлсаадей коЕ)Пус, установлеиные в нем первый палец, блоки второготрёть.его и. чётвертого-пятого пальцев с .кото1Ж1Мишарч 1рно связаны тяговый рычаг и водило с сателлитом,, закрепленные в корпусе зубчатый сек тор и пружину схвата, а также гиб.; кую .тягу, соединенную с сателлитом,,
; , водило выполнено в виде дв уплечего .. рычага, установленного соосно с зубчатым сектором, причем сателлит . установлен на одном пл.ече водила 5 и снабжен пружиной, закрепленной на другом плече водила, последнее через промежуточный рычаг связано -е nepBbJM-палЬ:цем, а посредством ггягового рычага соедййен.о с блоком вто10 рого-третьего пальцев, к которому прикреплена пружина схвата..
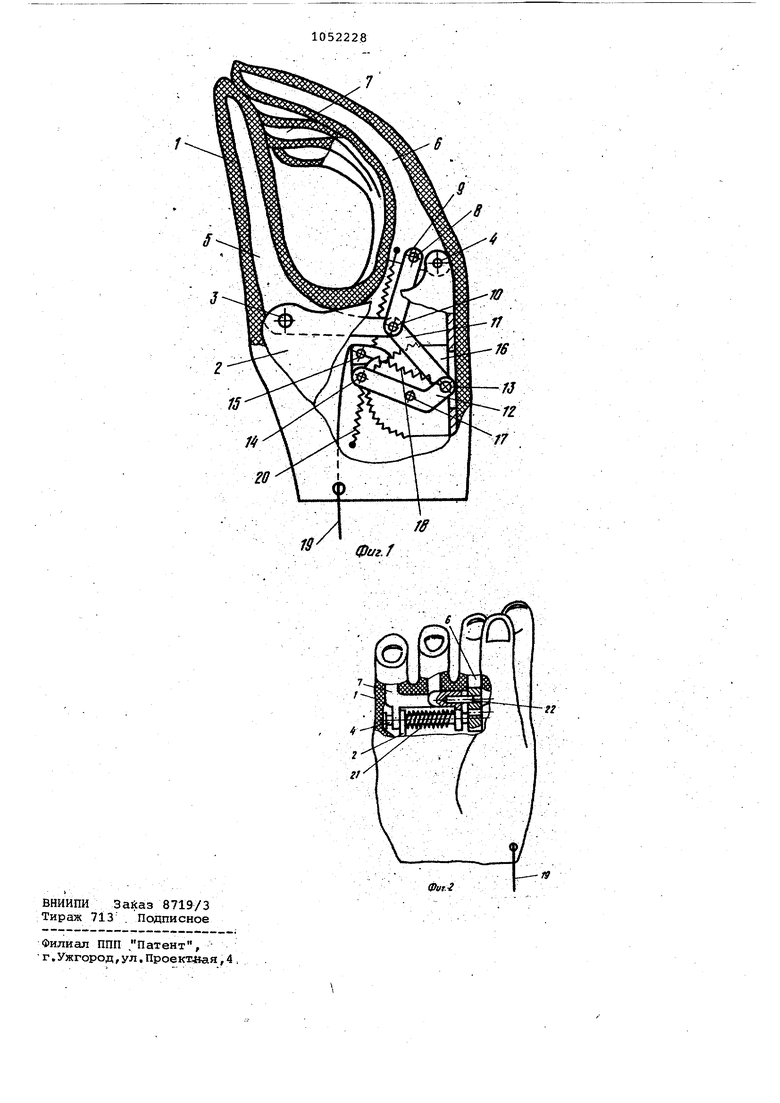
На фив. 1 показана искусственнгш кисть, общий вид на фиг. 2 - вид на кисть с ладонной стороны с вы15 рйвом и разрезом по узлу фиксации блока второго-третьего пальцев к блоку четвертого-пятого прхьцев. И-скусственная кисть содержит эластичнуюоболочку 1, корпус 2 с
Q осями 3 и 4 для шарнирного крепления роответственно первого пальца 5, блока второго-третьего пальцев б и блока четвертого-пятого пальцев 7. На блоке второго-третьего пальцев
25 6 с помощью оси 8 шарнирйо закреплен тяговый рычаг &, второй конец КОТОРОГО с помощь оси 10 марнирно соединен с рычагом первого, пальца 5 и промежуточным рычагом 11. Промежуточный рычаг 11 шарнирно соединен
с водй1лОм 12 осью 13. На втором плече водилаJ. 2 на оси 14 установлен сателлит 15 с зубьями, йаходящимися в зацеплении с неподвижным зубчатым сектором 16, Водило 12 посажено на
5 ось 17 соосно зубчатому сектору 16. Пружина 18 одним концом закреплена на 13 -водила 12, а - на сателлите 15, к которому присоеди- нена гибкая тяга 19. Пру-жина Схвата
0 20 закреплена одним концом на корпусе 2, а BTOEtJM - на блоке второго- Г . (третьего пальцев 6, Блок четвертогопятого пальцев 7 поджат пружиной 21 к блоку второго-третьего пальцев.6, .
JC и шТифт 22 входит в одно из отвёр-I стий в блоке второго-третьего паль-; .цев. . Искусственная кисть работает сяедуювдам образом.
В случае приложения усилия к гиб кой 19 сателлит- 15 начинс1ет поворачиваться вокруг оси 14 и растягивать пружину 18, при этом зубья сателлита 15 начинают .обкатываться по неподвижному зубчатому сектору
« 16 f находясь с ним в зёщеплении и таким образом совершать переносное вращательное движение вокрур оси 17,, увлек.ая при этом за собой водило 12 в йаЬравлёнии от пальцев кисти.
0 П1х тивоположйое плечо водила 12 соответственно, поворачивается в
йаправлейии к пальцам кисти и-толкает шарнирйо закрепленный промежуточ|Ный рычаг 11, который в свою очередь.
5 через ось 10 передает вращение рычагу первого пальца 5 и тяговому рычагу 9. Происходит раскрытие кисти, при этом пружина схвата 20 рас- , тягивается, а пЛечо действия силы сопротивления ее относительно оси 4 уменьшается вследствие поворота точки закрепления пружин вокруг той же оси 4, Это приводит к уменьшению момента сопротивления при раскрытии кисти..
Вращение сателлита 15 вркруг оси 14 может :продолжаться под действием . усилия на гибкой тяге 19 до тех пор/ пока он не упрется в торец водила , 12, Пружина 18-получит максимальное растяжение,а линия действия ее усилия будет проходить в непосредствен ной близости от центра оси 14, что значительно снизит (юмёнт силы сопротивления и соответственно прила- баемое усилие к гибкой тяге 19. к моменту достижения упора сателлитом 15 в торец, водила 12 зубья сатеЛлйта 15 выйдут из зацепления с , неподвижным зубчатым сектором 16. Дальнейший поворот водила 12 происходит без участия сателлита 15 в относительном движении до упора в к;орпус 2« Кисть полностью раскрыта. При взятий предмета искусственной кистью необходимо постепенно уменьшать усилие, приложенное к гибкой 19. Пружина схвата 20 начнет сокращаться и слшкать- пальцы на предмете. Через тяговый рычаг 9 и промежуточный рычаг 11 вращение передается водилу 12, которое поворачивается вокруг оси 17. Пружина 18бстает:ся в растянутом положении. Ее УсяЛЛйё значительно меньше усилия П уз|сины схвата 20 и плечо его приложения относительно оси вращения 14 сателлита 15 практически прйближается 1C нулю. Поэтому достаточно не- , большого усилия на гибкой тяге 19, ; . чтобй. предотвратить сЬкр щение пружины 18 и поворот сателлита 15. Блок второго-третьего пальцев 6, поворачиваясь к захватываемс 4у предмету, поворачивает и блок четвёртого-пя- г Того пальцев 7, так как один из ни поджат к ДРУГОМУ пружиной 21 и они i a aSoflflwcfl в ацё1Й1ёнии при помсмда
штифта 22, Соответственно через тягрвый рычаг 9 во вращение приводится первый палец. Предмет захватывается пальцами кисти через эластичную оболочку 1 и удерживается уси. лием,; определяемым разностью между .усилием/развиваемым схвата 20 в данный момент и усилием, приложенным к гибкой тяге 19,
0
При необходимости длительного удержания предмета или .схвата его с большим усилием производится дальнейшее ослабление усилия на згибкой тяге 19, Пружина 18 начинает сокращаться и поворачивать сателлит вокру.г оси 14, Зубья сателлита 15 входят, в зацепление с неподвижным сектором 16 и, обкатываясь по Нему, увлекают в дополнителзьное вращение в ту же сторону водило 12 вокруг оси 17, ВодилЪ 12, пов&рачиваясь, тянет промежуточный рычаг 11 и че- ре,него осу1цествляет дополнительное
смыкание пальцев кисти на предмете . 5 за счет упругой деформаций эластичной оболочки 1, Так осуществляется дожатие. При этом усилие пружины 18 передается на пальцы кисти с увели|ченным коэффициентом передачи, вследствие чего сила схвата значительно
0 увеличивается. .
Использование предлагаемой, искусственной кисти в значительной степени повышает эффективность при самообслуживании инвалидов и выпсшненйи ими определенных, трудовых процессов, так как позволяет регул ровать усилие схвата в широких пределах и при необходимости осуществлять дожатие , Уменьшение моментов ;сил сопротивления пружины схвата 20 и пружины 18 по мере раскрытия, кис.ти за счет, уменьшения плеч приложения их снижает усилие, прилагаемое к щбкой тяге. 19; Это значительно
снижает энергозатраты инвалида при управлении кистью и повышает физио логичность работы млшц, максимально ; приближая к норме в каждый момент 50jвремени соотношение между, силами
сопротивления и приложенным усилием :

| название | год | авторы | номер документа |
|---|---|---|---|
| Протез предплечья | 1984 |
|
SU1217403A1 |
| Искусственная кисть | 1986 |
|
SU1438766A1 |
| ИСКУССТВЕННАЯ КИСТЬ ДЛЯ ПРОТЕЗОВ-•-»•»- .— г л L.-' ! СогД | 1972 |
|
SU339078A1 |
| ИСКУССТВЕННАЯ КИСТЬ | 2006 |
|
RU2341233C2 |
| АКТИВНЫЙ ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 1973 |
|
SU407558A1 |
| Искусственная кисть | 1977 |
|
SU646989A1 |
| Искусственная кисть | 1981 |
|
SU973122A1 |
| Искусственная кисть | 1980 |
|
SU895430A1 |
| Искусственная кисть | 1978 |
|
SU764671A1 |
| Протез кисти | 1981 |
|
SU986416A1 |
ИСКУССТВЕННАЯ КИСТЬ, содержащая корпус, установленные В нем первый палец, блокч второго-третьего iи четвертого-пятого пальцев, с которыми шарнирно связаны тяговый рычаг и водило с сателлитом, закреплённые в корпусе зубчатый сектор и пружинусхвата, а также гибкую тягу, соединенную с сателлитом, от ли ч а ю щ а я с я тем, что, с целью обе: спечения равномерности силы, схвата ; во всем диапазоне перемещения паль:цев и врзможностй плавного ее регу.лирования, водило выполнено в виде двуплечего рычага, установленного соосно с зубчатым сектором, причем саГтеллит установлен на одном плече .водила и снабжен пружиной, закрепленной на другом плече водила, по:Следнёе через промежуточный рычаг связано с первым пальцем, а посредiCTBOM тягового Еялчага соединено с ; яблоком второго-третьего пальцев, к JKOTopoMy прикреплена пружина схвата. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Л., Медицина, 1978, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
