Изобретение относится к иротезированию.
Известны искусственные кисти для протезов, содержащие реверсивный электрический привод, управляемый, например, с помощью биопотенциаяов мышц, и фантомы пальцев кисти с подвижными фалангами. Однако известные протезы не обеспечивают кинематической независимости первого пальца, что необходимо для выполнения концевого, кулачного, бокового и кулачно-бокового способов охвата и приспособления .пальцев к форме схватываемого предмета.
Предлагаемая искусственная кисть отличается от известных тем, что в ней установлены: система рычагов и ползун блока второготретьего, пальцев, передающие движение блоку этих пальцев от .механизма движения первого пальца, приводимого в движение электрическим приводом, сгибательная пружина блока второго-третьего пальцев; бесступенчатый фи,ксатор схвата, установленный на линии передачи чу сил и я от первого пальца к блоку второготретьего пальцев, выполненный в виде поворотной втулки, шариирно связанной с ползуном блока второго-третьего пальцев и посаженный на стержень, жестко связанный с корпусом кисти; фрикционные втулки связи четвертого и цятаго .-пальцев между собой и с блоком второго-третьего -пальцев и жесткие ограничители движения пятого пальца относите-льно четвертого пальца, а также четвертого пальца относительно блрка второго-третьего пальцев.
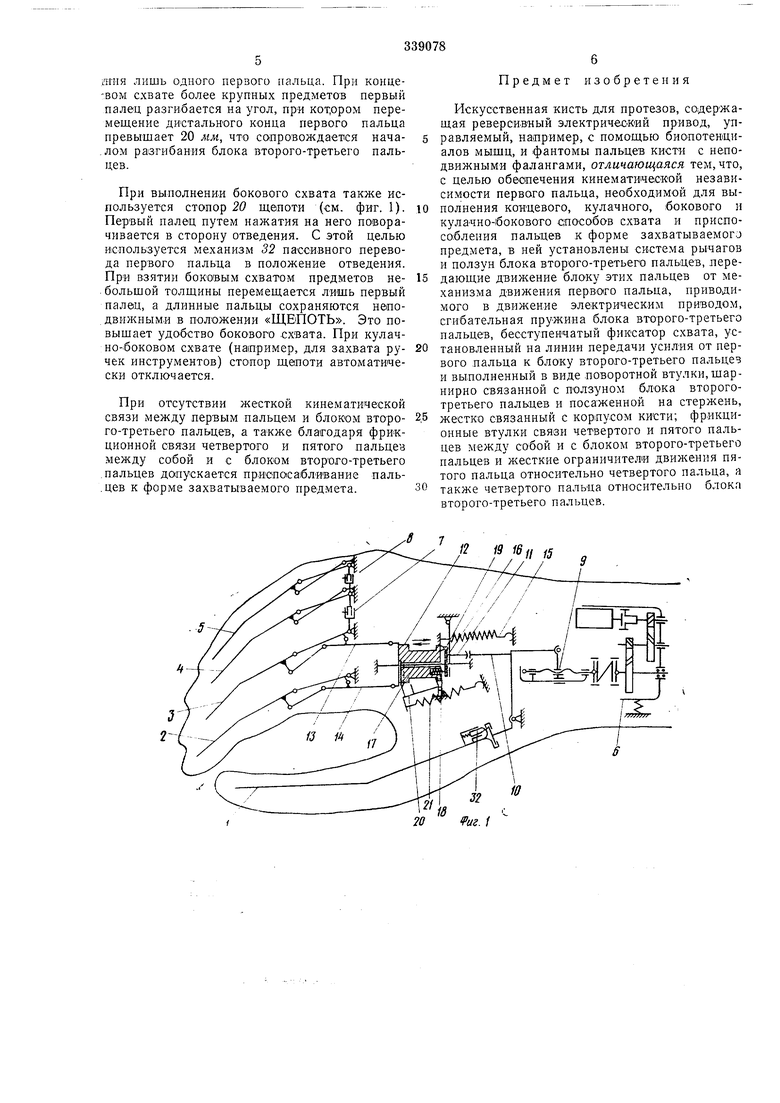
На фиг. 1 изображена кинематическая схема предлагаемой кисти для Протезов, на фиг. 2 - различные положения ползуна блока второготретьего пальцев в процессе работы кисти.
Искусственная кисть содержит первый палец Д блок второго-третьего пальцев 2 н 3 с подвижными фалангами, полуактивные четвертый палец 4 и цятый палец 5 также с подвижными фалангами. Первый .палец имеет автономный электрический привод 6, мощность которого при сги1бании пальцев, а также в первую половину периода разгиба-ния целиком передается первому лальцу. Во вторую половину периода разгибания мощность привода ис-пользуется для одновременного разгибания всех пяти пальцев. При этом полуактивные пальцы 4 и 5 следуют за блоком второго-третьего пальцев посредством фрикционных втулок 7 н 8, обеспечивающих относительную неподвижность четвертого и пятого пальцев между собой и четвертого пальца с блоком второготретьего пальцев.
. Подключение блока второго-третьего пальцев к электроприводу во вторую половину периода разгибания пальцев (т. е. на второй половине участка перемещения ползуна 9 в сторону разгибания пальцев) выполняется посредством толкателя 10, жестко связанного с рычагом первого пальца, и рычага 11, заставляющего при своем движении разгибаться блок втораго-третьего пальцев путем воздейстВИЯ на ползун 12 блока второго-третьего пальцев, связанный с указанным блоком через шатуны 13 и 14.
Одновременно с разгибанием блока второготретьего пальцев заводится сгйбательная пружина 15, соединенная с ползуном 12 блока второго-третьего палнцев.
При схвате предмета активно воздействует на него лишь первый палец, блок второготретьего Пальцев благодаря наличию бесступенчатого фиксатора 16, не допускающего разгибание этого блока пальцев, создает жесткую преграду, противопоставляемую силовому воздействию первого пальца. Фиксатор выполнен в виде .поворотной втулки, шарнирно связанной с ползуном 12 и посаженной на стержень 17, жестко связанный с корпусом кисти. Фиксатор затормаживается относительно стержнл под действием пружины 18, стремящейся перекосить фиксатор относительно стержня.
Если лолуактивные четвертый и пятый пальцы занимают положение сгибания, не превышающее угол сгибания блока второго-третьего пальцев, то они упираются в соответствующие упоры этого блока пальцев и четвертого пальца и также образуют жесткую преграду против разгибания (это позволяет, например, при кулачном схвате палки устойчиво ее удерлсивать всеми длиииыми па льцами).
Разгибание блока второго-третьего пальцев в соответствующую фазу работы привода первого паотьца осуществляется беспрепятственно благодаря тому, что давлению на ползун 12 блока второго-третьего пальцев предшествует раофиксация последнего. Это осуществляется благодаря тому, что рычаг 11 при своем перемещении под действием толкателя 10 преодолевает усилие пружины 18 и заставляет фиксатор 16 повернуться относительно оси поворота 19 до соприкосновения плоскости фиксатора с торцовой плоскостью ползуна 12 блока второго-третьего пальцев. После этого фиксатор занимает строго соосное положение с ползуном 12, благодаря чему последний расфиксируется. В нормальном положении фиксатор фиксирует лишь в одном направлении - н сторону разгибания пальцев.
Для осуществления кулачного схвата все пальцы предварительно разгибаются, вслед за этим подается соответствующий сигнал и привод начинает работать в сторону сгибания. После частичного сгибания первого пальца срабатывает сгйбательная пружина, благодаря которой к предмету подводятся блок второготретьего пальцев, а также связанные с ним фрикционной связью четвертый }i пятый пальцы (или посредством жестких ограничителей разгибания-в положении, идентичном полол ению блока второго-третьего пальцев). Вслед за этим дальнейшее активное сгибание первого
палыца обеспечивает дожатие предмета с необходимой силой схвата.
Для осуществления концевого схвата типа «щепоти пальцы должны быть предварительно разогнуты не полностью (примерно на три четверти полного раскрытия). В этом случае автоматически включается стопор 20 щепоти, подпружиненный посредством перекидной пружины 21, и сгйбательная пружина 15 подведет блок второго-третьего пальцев к положению «щепоть, в котором этот блок застопорится и дальнейшее его сгибание окажется невозможным. При этом четвертый и пятый пальцы, фрикционио связанные с блоком второго-третьего пальцев, для удобства выполнения письма и других операций могут быть полностью согнуты (пассивно) и подведены к середине ладони. Соответственно этому оси четвертого и пятого пальцев располагаются под определенным углом к оси блока второготретьего пальцев.
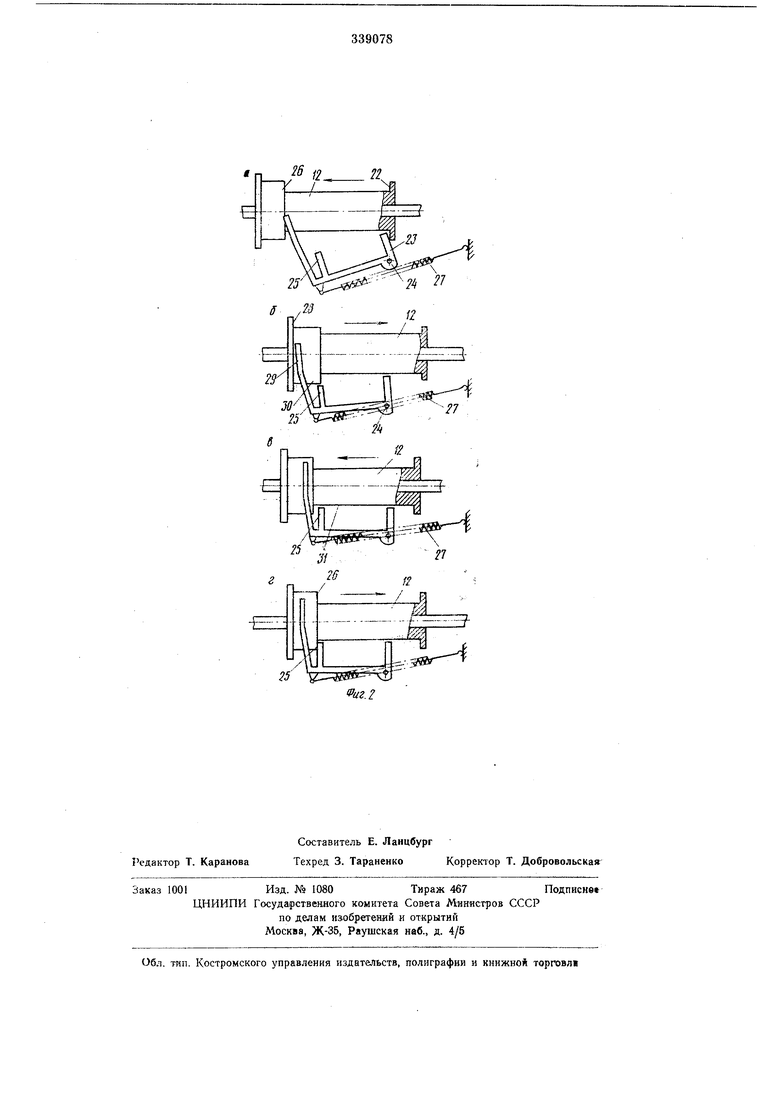
Стопор 20 щепоти с автоматическим переключателем концевого схвата на кулачный н наоборот работает следующим образом (см. фиг. 2 а, б, в, г).
При заверщении полного разгибания пальцев буртик 22 ползуна 12 блока второго-третьего пальцев надавливает на лапку 23 стопора щепоти и поворачивает последний относительно оси 24, выводя стопорную площадку 25 из соприкосновения с буртом 26 ползуна. При этом перекидная пружина 27 займет крайнее нижнее положение (см. фиг. 2а). В этом положении кисть подготовлена для кулачного схвата. При подаче команды на схват сгйбательная пружина обеспечит полное сгибание блока втораго-третьего пальцев в кулак или до соприкосновения с предметом.
В фазе сгибания второго-третьего пальцев, вскоре после перехода их за положение щепоти, бурт 2S надавливает на втулку 29 стопора, заставляя последний повернуться относительно оси 24 и подвести стопорную площадку 25 к поверхности 30 ползуна (см. фиг. 26). Перекидная пружина 27 займет при этом верхнее (относительно оси 24) положение.
При последующем разгибании второго-третьего паль-цев, сразу после перехода их за положеш-ie щепоти, стопорная площадка 25 под действием перекидной пружины 27 заскакивает на поверхность 31 ползуна 12 (см. фиг. 20). Таким образом кисть подготовлена для сгибания в щепоть. При обратном движении ползуна в сторону сгибания пальцев бурт 26 ползуна упрется в стопорную площадку 26 стопора, и движение блока второго-третьего пальцев- прекратится в положении щепоти (см. фиг. 2г).
Есл( же вместо схвата в щепоть требуется осуществление кулачного схвата, то с этой целью, как указано выще, следует предварительно полностью разогнуть пальцы.
Захват щепотью мелких пред.метов (толщиной до 20 лш) и и.х Освобождение осуществляется за счет движений огибания и разгибаагия лишь одного первого пальца. При конце-вом схвате более крупных предметов первый палец разгибается на угол, при котрром перемещение дистального конца первого пальца превышает 20 мм, что сопровождается нача,лом разгибания блока второго-третьего пальцев.
При выполнении бокового схвата также используется стопор 20 щепоти (см. фиг. 1). Первый палец путем нажатия на него поворачивается в сторону отведения. С этой целью используется механизм 32 пассивного перевода первого пальца в положение отведения. При взятии боковым схватом предметов небольшой толщины перемещается лишь первый палец, а длинные пальцы сохраняются ншо.движными в положении «ЩЕПОТЬ. Это повышает удобство бокового .схвата. При кулачно-:боковом схвате (например, для захвата ручек инструментов) щепоти автоматически отключается.
При отсутствии жесткой кинематической связи между первым пальцем и блоком второго-третьего пальцев, а также благодаря фри-кционной связи четвертого и пятого пальцев между собой и с блоком второго-третьего .пальцев допускается приопосабл-ивание паль.цев к форме захватываемого предмета.
Предмет изобретения
Искусственная кисть для протезов, содержащая ревереивный электрический привод, управляемый, например, с помощью биопотен1циалов мышц, и фантомы пальцев кисти с неподвижными фалангами, отличающаяся тем, что, с целью обеспечения кинематической независимости первого пальца, необходимой для выполнения коицевого, кулачного, ;бокового и кулачно-бокового способов схвата и приспособления пальцев к форме захватываемого предмета, в ней установлены система рычагов и ползун блока второго-третьего палыцев, передающие движение блоку этих пальцев от механизма движения первого пальца, приводимого в движение электрическим приводом, сгибательная пружина блока второго-третьего пальцев, бесступенчатый фиксатор схвата, установленный на линии передачи усил-ия от первого .пальца к блоку второго-третьего пальцев и выполненный в виде поворотной втулки, шарнирно связанной с ползуном блока второготретьего пальцев и посаженной на стержень, жестко связанный с корпусом кисти; фрикционные втулки связи четвертого и пятого пальцев между собой и с блоком второго-третьего пальцев ил есткие ограничители движения пятого пальца относительно четвертого пальца, я также четвертого пальца относительно блока второго-третьего пальцев. J № 13 в„ а /о -№ i°T-4 /fj п
2f - j ft ---vir
%.f