Изобретение относится к.подъемно-транспортному машиностроению, в частности к рычажно-клиновым захватам для подъема и транспортировки грузов, имеющих в средней части отверстие с гладкой поверхностью.
Известен рычажно-клиновый захват для грузов с вертикальным .цилиндрическим отверстием, содержащий закрепленные щарнирно на несущем элементе подхватные рычаги с контактными башмаками на свободных концах и установленный в отверстии несущего элемента с возможностью перемещения вертикальный стержень с распорным конусом на нижнем конце и петлей для навещивания на крюк грузоподъемного механизма на верхнем конце 1.
Недостатком известного захвата является то, что взаимодействие с грузом осуществляется только в результате зацепления бащмаками за нижний торец груза. При малых размерах проточки, куда входят башмаки, и при большом весе груза поперечное сечение башмаков может не выдержать груз. Снижается надежность захвата и уменьшаются его грузоподъемные возможности.
Целью изобретения является повышение надежности.
Поставленная цель достигается тем, что рычажно-клиновый захват для грузов с вертикальным цилиндрическим отверстием, содержащий закрепленные шарнирно на несущем элементе подхватные рычаги с контактными бащмаками на свободных концах и установленный в отверстии несуще. го элемента с возможностью перемещения вертикальный стержень с распорным конусом на нижнем конце и петлей для навещивания на- крюк грузоподъемного механизма на верхнем конце, снабжен охватывающим рычаги и стержень разрезным пружинным кольцом с выполненными на его внутренней поверхности диаметрально расположенными пазами, а кенус выполнен с радиальными направляющими ребрами, расположенными в пазах кольца.
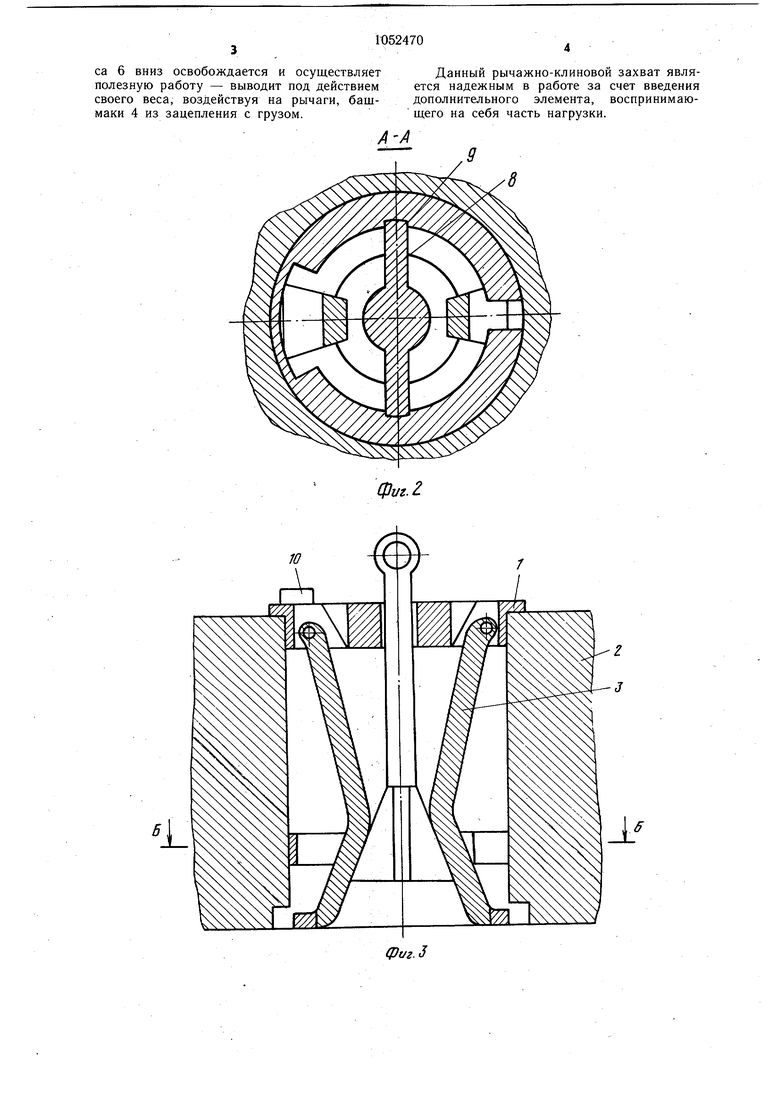
На фиг. 1 изображен предлагаемый захват в рабочем положении, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - захват в нерабочем положении, разрез; на фиг. 4 - разрез Б-Б на фиг. 3.
Рычажно-клиновой захват содержит элемент 1, форма и размеры которого обеспечивают вхождение его с минимальным зазором во внутреннюю осевую полость груза 2. На несущем элементе 1 щарнирно закреплены подхватные рычаги 3. Их концы снабжены контактными башмаками 4, имеющими форму сегментов. Через несущий элемент 1 пропущен вертикальный стержень 5, снабженный средством расклинивания в виде конуса 6. С целью повышения надежности захвата груза и работы средства выведения рычагов 3 в нерабочее положение, на рычаги 3 одето разрезное пружинное кольцо 7, охватывающее рычаги и конус 6, на поверхности которого имеются радиальные направляющие ребра 8, входящие в соответствующие диаметрально расположенные пазы 9 на разрезном кольце (фиг. 1).
Захват работает следующим образом. Вертикальный стержень 5 перемещают
вниз (по чертежу) для того, чтобы конус 6 опустился и выщел из контакта с рычагами 3. Тогда последние под действием веса разрезного кольца 7 сойдутся к центру и смогут свободно войти в осевую полость груза 2. Затем с помощью транспортировочной ручки 10 захват ориентируют по центру полости груза 2 и устанавливают в ней так, чтобы контактные башмаки 4 рычагов 3 находились на уровне кольцевой выточки. Этому (при однотипном грузе) помогает
0 кольцевая выемка на несущем элементе 1. Несущий элемент 1 и выемка выполняют роль посадочной втулки, которая одновременно центрирует захват в полости груза 2 и подвещивает его на такой высоте, при которой концы бащмаков 4 смогли бы
5 свободно войти в выточку. После этого стропольщик или подъемный механизм поднимает стержень 5. Конус 6 скользит по профилированным поверхностям рычагов 3 и разрезного кольца 7, расклинивает их и бащмаки 4 входят в выточку.
В момент подъема и транспортировки груз 2 оказывается зажатым между верхней поверхностью башмаков 4 и нижней поверхностью элемента 1, а также плотно прижатым конусом б разрезного кольца 7к
внутренним стенкам отверстия в грузе 2, что исключает раскачивание груза 2 относительно захвата и обеспечивает восприятие всего веса или его части. Башмаки 4, входящие в зацепление с торцом груза, полностью или значительно разгружены и слу0 жат страховкой.
Контактные бащмаки 4 могут представлять собой части рычагов, выполненные с последними заодно целое (как в прототипе) или в виде отдельных элементов - контактных башмаков.
Для извлечения захвата из груза стропольщик вертикальный стержень 5 с конусом 6 перемещает вниз и выводит последний из контакта с рычагами 3 и разрезным кольцом 7, которые под действием веса разQ резного кольца 7 сходятся к центру и выводят концы бащмаков 4 из выточки.
В данной конструкции разрезное пружинное кольцо 7 помимо своей обычной функции (работы на разжимание) при подъеме клина взаимодействует со внутренними
5 стенками отверстия в грузе, т.е. оказывается трансформатором и аккумулятором части энергии подъемного механизма. Эта запасенная энергия после йеремеьцения конуса 6 вниз освобождается и осуществляет полезную работу - выводит под действием своего веса, воздействуя на рычаги, башмаки 4 из зацепления с грузом.
Данный рычажно-клиновой захват является надежным в работе за счет введения дополнительного элемента, воспринимающего на себя часть нагрузки.
8
фиг. 2.
фиг.З
фиг.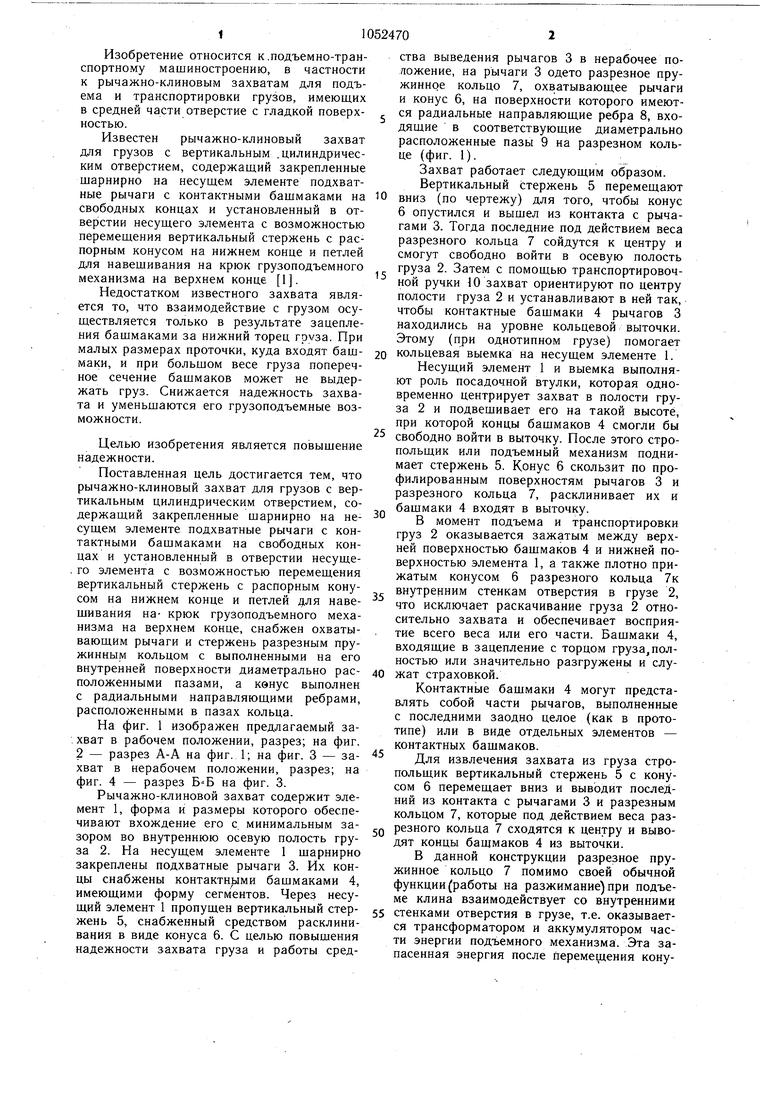
| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажно-клиновой захват для грузов с осевой полостью | 1981 |
|
SU1131813A1 |
| Грузозахватное устройство для изделий с полостью | 1979 |
|
SU1020353A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захватное устройство для полых изделий | 1981 |
|
SU1049408A1 |
| Захват для изделий с внутренней полостью | 1988 |
|
SU1553507A1 |
| Захват для грузов с отверстием | 1988 |
|
SU1576470A1 |
| Захват-кантователь | 1981 |
|
SU992384A1 |
| Грузоподъемная траверса | 1987 |
|
SU1470644A1 |
| Захват для стеновых блоков и колонн | 1959 |
|
SU142395A1 |
| Маятниковая подвесная канатная дорога | 1961 |
|
SU142339A1 |

РЫЧАЖНО-КЛИНОВОЙ ЗАХВАТДЛЯ ГРУЗОВ С ВЕРТИКАЛЬНЫМ ЦИЛИНДРИЧЕСКИМ ОТВЕРСТИЕМ, содержащий закрепленные шарнирно на несущем элементе подхватные рычаги с конW тактными башмаками на свободных концах и установленный в отверстии несущего элемента с возможностью перемещения вертикальный стержень с распорным, конусом на нижнем конце и петлей для навешивания на крюк грузоподъемного механизма на верхнем конце, отличающийся тем, что, с целью повышения надежности, он снабжен охватывающим рычаги и стержень разрезным пружинным кольцом с выполненными на его внутренней поверхности диаметрально расположенными пазами, а конус выполнен с радиальными направляющими ребрами, расположенными в пазах кольца. сл сд ю 4 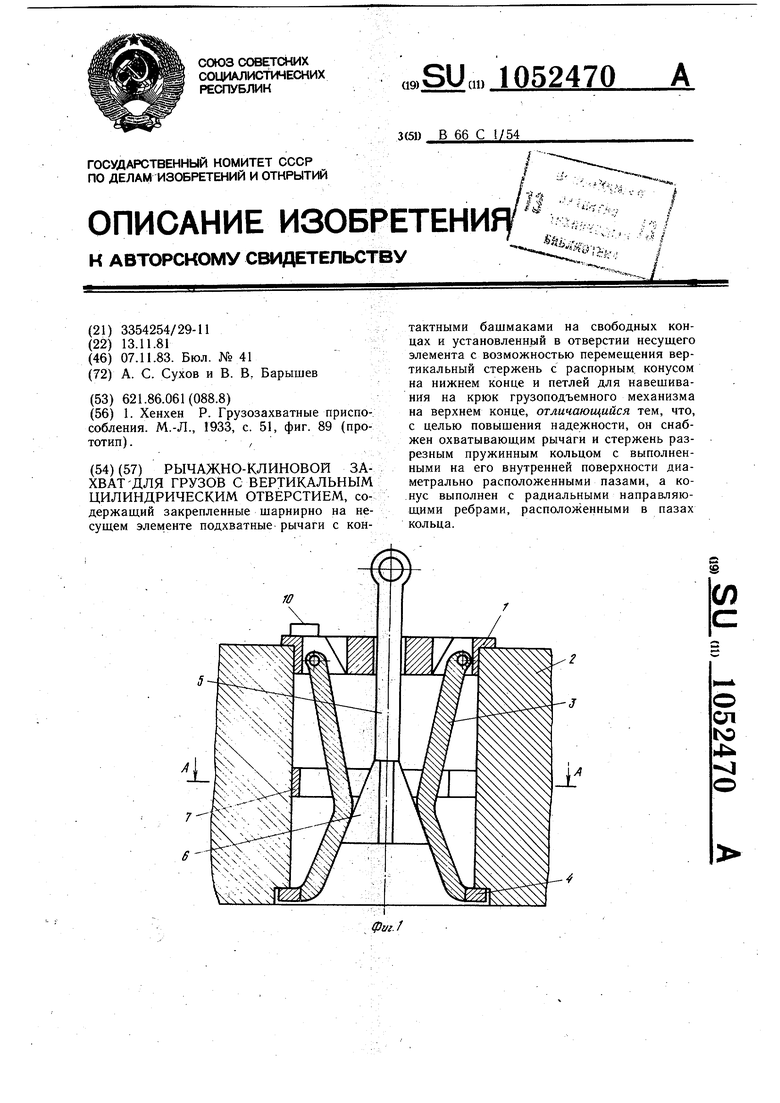
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хенхен Р | |||
| Грузозахватные приспособления | |||
| М.-Л., 1933, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| / | |||
