Изобретение относится к грузозахватным средствам для транспортировки грузов, имеющих в средней части отверстие с гладкой поверхностью, в частности для захвата за поверхность втулки и транспортировки катков дорожных машин. Известен рычажно-клиновой захват для грузов с осевой полостью, содержащий несущий элемент с центральным отверстием, шарнирно прикрепленные к нему захватные рычаги с контактными башмаками на концах, жестко прикрепленные к рычагам кронштейны и установленный в отверстии несущего элемента с возможностью вертикального перемещения стержень с распорным конусом на нижнем конце и элемент-ом для навещивания на крюк грузоподъемного механизма на верхнем конце 1. Однако в известном захвате при перемещении вверх центрального элемента, состоящего из силового стержня с конусом на нижнем конце, при поднятии груза он может заклиниваться в профилированных рычагах и его приходится извлекать с усилием или даже выбивать. Цель изобретения повышение удобства в эксплуатации. Для достижения этой цели рычажно-клиновой захват для грузов с осевой полостью, содержащий несущий элемент с центральным отверстием, шарнирно прикрепленные к нему захватные рычаги с контактными башмаками на концах, жестко прикрепленные к рычагам кронштейны и установленный в отверстии несущего элемента с возможностью вертикального перемещения стержень с распорным конусом на нижнем конце и элементом для навешивания на крюк грузоподъемного механизма на верхнем конце, снабжен штырями, диаметрально закрепленными на вертикальном стержне с возможностью взаимодействия с кронштейнами, которые выполнены Г-образными, при этом распорный конус выполнен эллиптическим. На фиг. 1 изображен общий вид захвата в поперечном сечении во время подъема груза; на фиг. 2 - сечение А-А на фиг. 1, взаимодействие клина и рычагов при подъеме груза; на фиг. 3 - общий вид захвата в поперечном сечении в нерабочем положении; на фиг. 4 - сечение Б-Б на фиг. 3. Рычажно-клиновой захват содержит рычаги 1 и 2, верхним концом шарнирно соединенные с несущим элементом 3, а нижние концы их выполнены с башмака.ми 4 и 5. Для транспортировки захвата на несущем элементе 3 имеется ручка 6. Сквозь несущий элемент 3 свободно пропущен силовой вертикальный стержень 7 с конусом 8 на нижнем конце и элементом 9 для навешивания на крюк грузоподъемного механизма. В средней части стержня 7 крепятся диаметральные штыри 10. Для взаимодействия с ними на рычагах 1 и 2 расположены кронштейны 11 и 12, выполненные Г-образными. В верхней части стержня 7 имеется рукоятка 13 со стопором 14. Рычажно-клиновой захват установлен в осевую полость 15 транспортируемой детали 16. Рычажно-клиновой захват работает еледующим образом, Сначала приводят механизм в исходное нерабочее состояние, перемещая силовой стержень 7 вниз и поворачивая рукоятку 13 по часовой стрелке (если смотреть на захват сверху) до тех пор, пока поперечный размер механизма не позволит свободно пройти в центральную полость 15 транспортируемой детали 16. При этом диаметрально расположенные щтыри 10 взаимодействуют с кронштейнами 11 и 12 на рычагах 1 и 2, заставляя их сходиться. Роль диаметральных штырей может выполнять конус 8, который при его повороте действует на кронштейны 11 и 12, заставляя рычаги 1 и 2 сходиться. Далее с помощью транспортировочной ручки б ориентируют захват по центру полости 15 и устанавливают в последней. При этом несущий элемент 3 своей торцовой поверхностью центрируется в полости 15. Рычаги 1 и 2 имеют длину, которая при установке захвата в полости 15 обеспечивает зазор между башмаками 4, 5 и поверхностью на которой лежит груз, например полом. Этот зазор необходим для вхождения башмаков 4 и 5 в кольцевую проточку на нижней части транспортируе.мой детали 16. Стержень 7 разворачивают рукояткой против часовой стрелки и ориентируют в положении, указанном на фиг. 2. Перемещают .стержень 7 вверх, при этом конус 8, действуя на шарнирно закрепленные рычаги 1 и 2, раздвигает их и бащмаки 4, 5 заходят в проточку на нижней части детали 16. Таким образом деталь 16 оказывается зафиксированной между несущим элементом 3, выполненным в виде круглого кольца, и башмаками 4,5. Чтобы во время транспортировки детали 16 не произошло самопроизвольное открытие захвата, на рукоятке 13 имеется стопор 14, выполненный в виде штифта заходящего в прорезь на несущем элементе 3, и не позволяющий ей развернуться Когда транспортировка детали закончена и надо извлечь захват из детали, извлекают стопор 14 из несущего элемента и поворачивают рукоятку по часовой стрелке, Далее все происходит аналогично тому, как при введении захвата в полость 15 детали 16.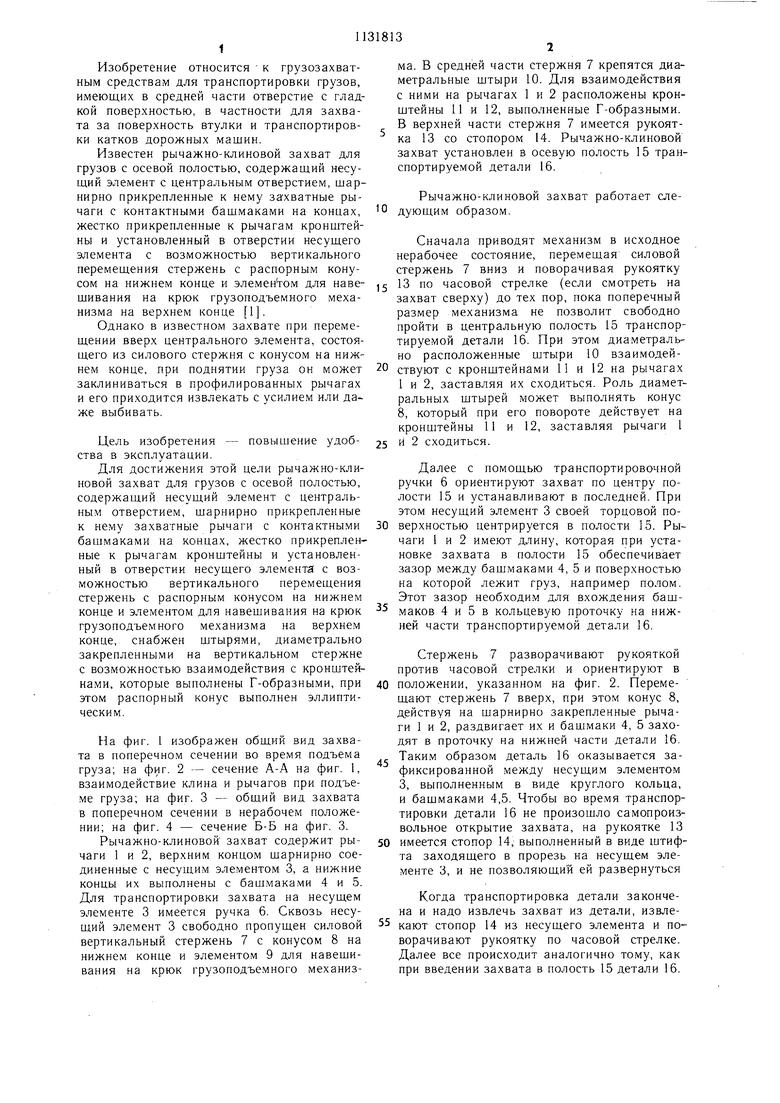

| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажно-клиновой захват для грузов с вертикальным цилиндрическим отверстием | 1981 |
|
SU1052470A1 |
| Захват для грузов с отверстием | 1988 |
|
SU1576470A1 |
| Захват для грузов в мягкой таре | 1981 |
|
SU1009970A1 |
| Подъемное устройство для грузов с центральным отверстием | 1984 |
|
SU1199737A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| Устройство для захвата плоских деталей | 1988 |
|
SU1744039A1 |
РЫЧАЖНО-КЛИНОВОЙ ЗАХВАТ ДЛЯ ГРУЗОВ С ОСЕВОЙ ПОЛОСТЬЮ, содержащий несущий элемент с центральным отверстием, щарнирно прикрепленные к нему захватные рычаги с контактными башмаками на концах, жестко прикрепленные к рычагам кронштейны и установленный в отверстие несущего элемента с возможностью вертикального перемещения стержень с распорным конусом на нижнем конце и элементом для навешивания на крюк грузоподъемного механизма на верхнем конце, отличающийся тем, что, с целью повышения удобства в эксплуатации, он снабжен штырями, диаметрально закрепленными на вертикальном стержне с возможностью взаимодействия с кронштейнами, которые выполнены Г-образными, при этом распорный конус выполнен эллиптическим.
| I | |||
| Хенхен Р | |||
| Грузозахватные приспособления | |||
| Л | |||
| - М.,1933, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
