Изобретение относится к грузоподъемным захватам, предназначенным для подъема, транспортирования и монтажа строительных изделий с внутренней полостью, в частности железобетонных пустотных настилов и колонн с пустотами.
Цель изобретения - повышение грузоподъемности .
На фиг.1 показано захватное устройство с раздвижным механизмом в виде талрепа после его поворота в канале , панели, фронтальная проекция; на фиг.2 - то же, профильная проекция;
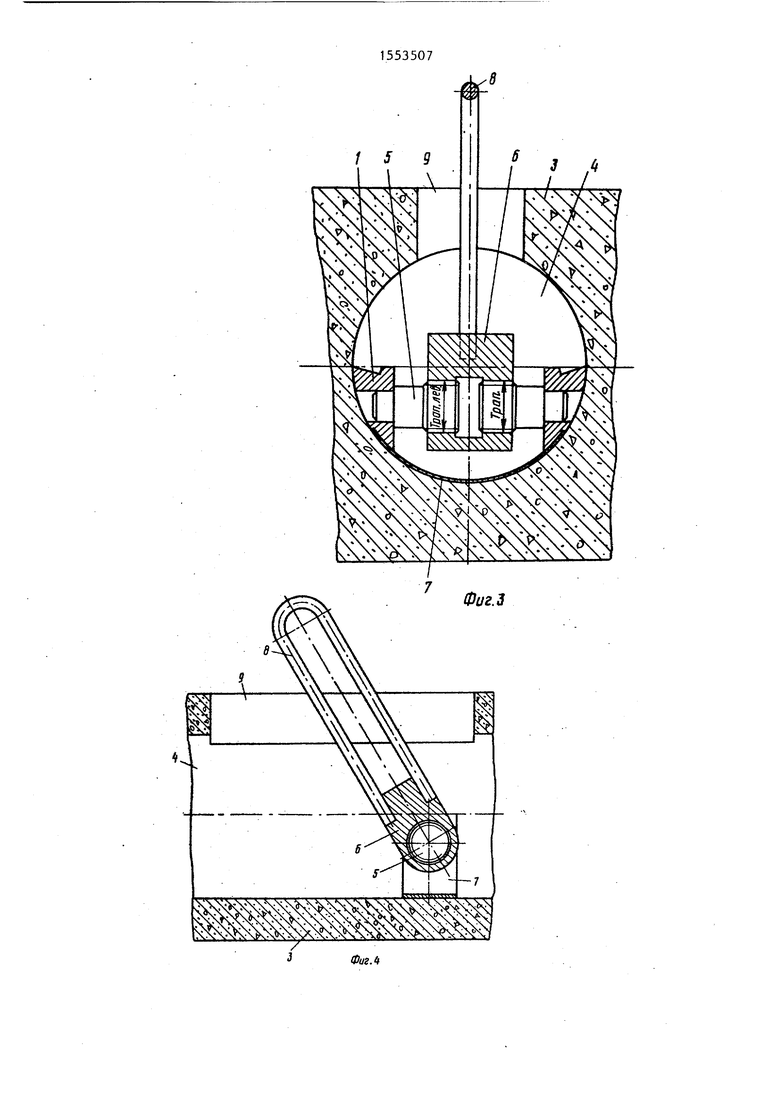
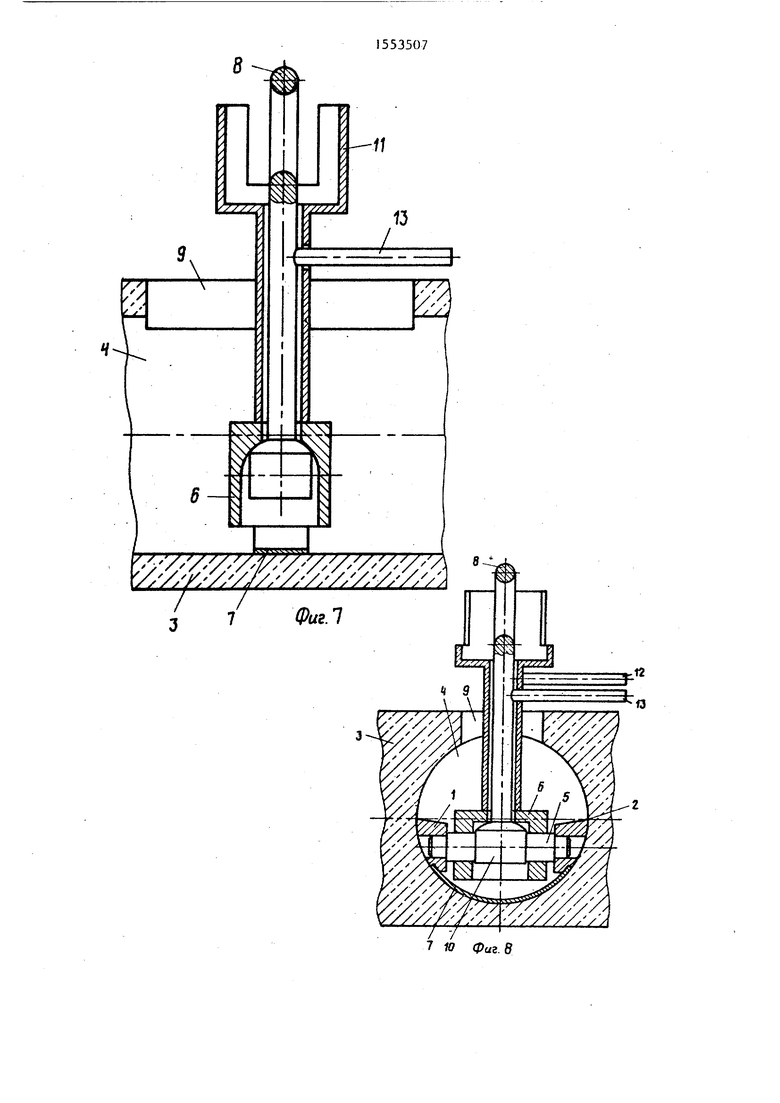
на фиг.З - захватное устройство с раздвижным механизмом в виде талрепа в рабочем положении, фронтальная проекция; на фиг.4 - то же, профильная проекция; на фиг.5 - пустотная панель в момент транспортировки ее с помощью захватного устройства с раздвижным механизмом в виде талрепа; на фиг.6 - захватное устройство с раздвижным механизмом в виде эксцентрика после его поворота в канале панели,фронтальная проекция; на фиг.7 - то же, профильная проекция; на фиг.8 - захватное устройство с раздвижным механизмом в
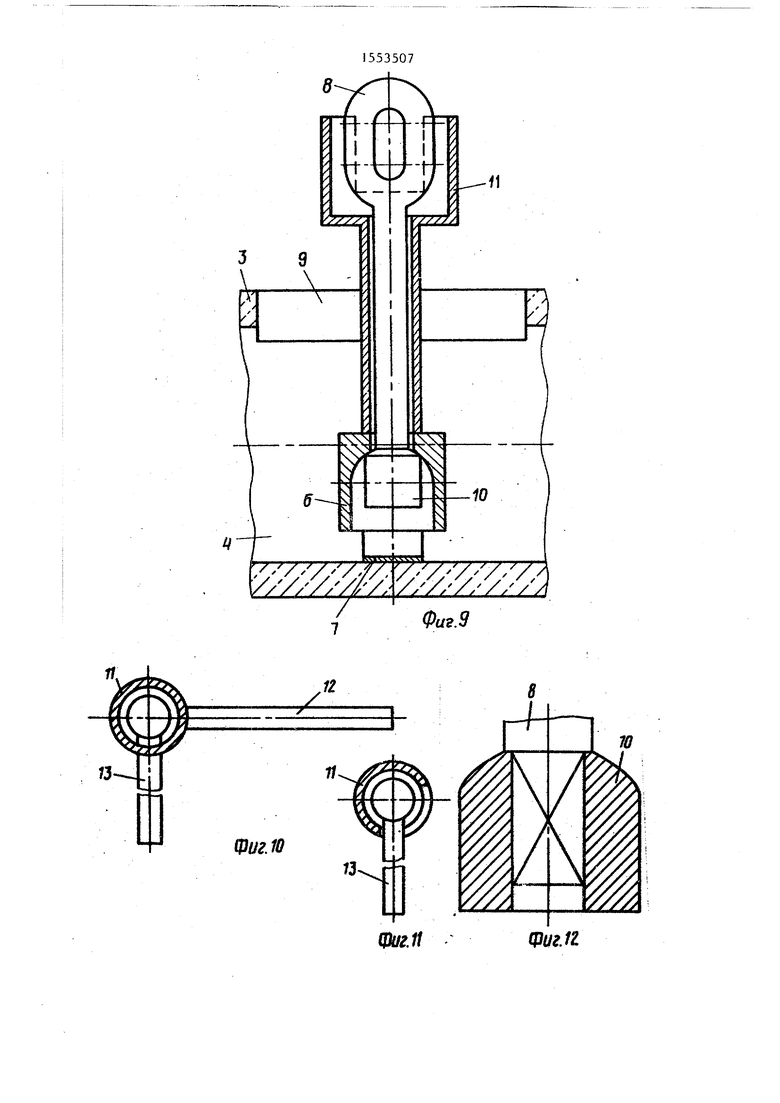
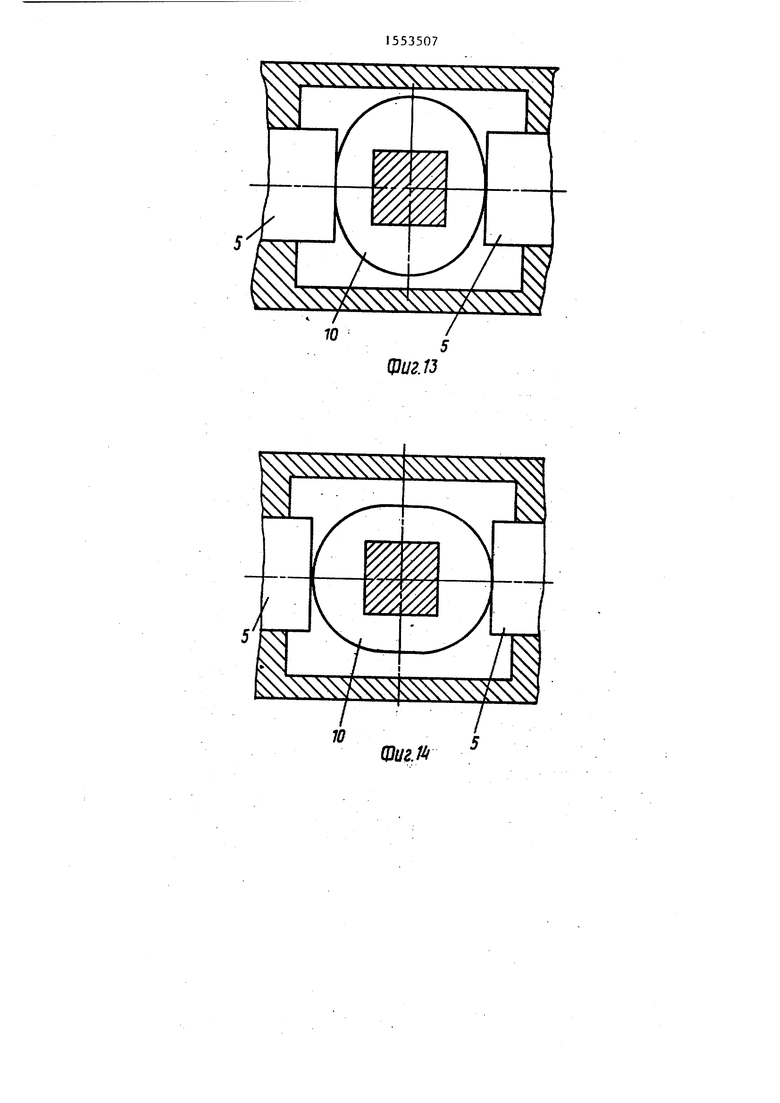
виде эксцентрика в рабочем положении, фронтальная проекция; на фиг.9 - то же, профильная проекция; на фиг.10 - ручка кожуха, разрез; на фиг.11 - ручка проушины, разрез; на фиг.12 - соединение пружины с кулачком, разрез; на фиг.13 - кулачок, положение установки захватного устройства после его поворота в канале панели, разрез} на фиг.14 - то же, положение захватного устройства в рабочем положении, разрез; на фиг.15 - пустотная панель в момент транспортировки ее с помощью захватного устройства с раздвижным механизмом в виде эксцентрика; на фиг.16 - захватное устройство с раздвижным клиновым механизмом после его поворота в канале панели, фронтальная проекция; на фиг.17 - то же, профильная проекция; на фиг.18 - захватное устройство с раздвижным клиновым механизмом в рабочем положении, фронтальная проекция; на фиг.19 - то же, профильная проекция
Захват состоит из подхватного элемента, выполненного составным в виде двух башмаков 1, каждый из которых снабжен упорным клиновым зубом 2 с клиновой контактной поверхностью, взаимодействующей с панелью 3, имеющей цилиндрическую полость 4. К башмакам 1 жестко присоединены полуоси 5, объединенные общей втулкой 6. Башмаки 1 соединены между собой упругим элементом, например пластинчатой пружиной 7, служащей упором подхватного элемента, при этом расстояние между упорными клиновыми зубьями 2 башмаков 1 вдвое больше расстояния от низа пластинчатой пружины до оси, соединяющей крайние точки зубьев 2 в их рабочем положении. Втулка 6 соединена с проушиной 8, выведенной за верхнюю плоскость панели 3 через щель 9. Внутри втулки расположен раздвижной механизм, который может быть выполнен либо в виде талрепа, либо в виде экс- цен трива или клина.
В случае его выполнения в виде тал репа полуоси 5 снабжены резьбой разных направлений, а втулка 6 выполнена с соответствующей им внутренней резьбой, при этом проушина 8 жестко соединена с втулкой 6.
В случае выполнения раздвижного ме ханизма в виде эксцентрика проушина 8 выполнена в нижней части в виде стерж ня, входящего внутрь втулки 6, на кон
5
0
5
0
5
0
5
0
5
це которого жестко закреплен эксцентрик 10, расположенный между полуосями 5. Проушина 8 снабжена кожухом 11, имеющим в зоне строповки сквозную прорезь и жестко соединенным с втулкой 6. К кожуху 11 жестко присоединена ручка 12, а в проушине 8 на другом уровне жестко присоединена ручка 13. Кожух 11 имеет поперечную прорезь для пропуска ручки 13.
В случае выполнения раздвижного механизма в виде клина, взаимодействующего с полуосями, проушина 8 выполнена в нижней части в виде стержня, вхо дящего внутрь втулки 6, на конце стержня закреплен двусторонний клин 14, расположенный между полуосями 5. Проушина 8 снабжена кожухом 11, опирающимся на втулку 6 через тарельчатую пружину 15. На стержне проушины 8 выше кожуха 11 расположены две полу- очи 16, на которых установлены эксцентрики 17 с ручками 18, жестко соединенными между собой.
Захват с раздвижным механизмом в виде талрепа работает следующим образом.
Через прямоугольную щель 9 в панели 3 опускают захват во внутреннюю полость 4, при этом башмаки 1 расположены вдоль продольной оси полости 4 панели 3. Затем за проушину 8 поворачивают захватное устройство в полости 4 на 90 и опускают до соприкосновения пластинчатой пружины 7 с нижней поверхностью полости. После поворота проушины 8 в направлении крюка крана башмаки 1 разжимаются за счет поворота втулки 6 и упираются в боковые поверхности полости 4 зубьями 2. При подъеме панели 3 башмаки под действием крутящего момента, передающегося проушиной 8 на втулку 6, продолжают разжиматься, передавая распор на стенки нижней половины внутренней полости 4.
Создание расчетного распорного усилия в полости панели, гарантирующего надежность работы строповоч- ного устройства и препятствующего смещению устройства в продольном направлении, обеспечивается тем, что острый угол наклона к горизонтали проушины 8 в рабочем положении превышает угол наклона стропа.
Захват с раздвижным механизмом в виде эксцентрика работает следующим образом.
Через прямоугольную щель 9 в па- нели 3 опускают захват во внутреннюю полость 4, при этом башмаки 1 расположены вдоль продольной оси полости 4 панели 3. Затем за кожух 11 поворачивают захватное устройство в полости 4 на 90° и опускают до соприкосновения пластинчатой пружины 7 с нижней поверхностью полости 4. После поворота проушины 8 вокруг своей оси за ручку 13 относительно кожуха 11 башмаки 1 раздвигаются эксцентриком 10 и приходят в соприкосновение с боковыми поверхностями полости 4. В этом случае не требуется дополнительный распор в боковые поверхности, так как подъем осуществляется траверсой с вертикальными стропами. При подъеме панели башмаки 1 упорными зубьями 2 контактируют с цилиндрической поверхностью полости 4 на уровне ее горизонтальной оси.
Захват с раздвижным клиновым механизмом работает следующим образом.
Через прямоугольную щель 9 в панели 3 опускают захват во внутреннюю полость 4, при этом башмаки 1. распоожены вдоль продольной оси полости 4 :панели 3. Затем за проушину 8 поворачивают захватное устройство в полости 4 на 90° и опускают до соприкосновения пластинчатой пружины 7 с нижней поверхностью полости 4. Даее с помощью ручек 18 поворачивают эксцентрики 17. При этом проушина 8 перемещается вверх и перемещает клин, который раздвигает полуоси 5 и зубья 2 башмаков 1 входят в соприкосновение с внутренней полостью 4,
При дальнейшем повороте эксцентиков 17 происходит сжатие пружины 15. При подъеме панели с помощью
0
5
0
5
0
5
0
5
траверсы с вертикальными стропами упорные зубья башмаков контактируют с цилиндрической поверхностью полости 4 на уровне ее горизонтальной оси.
Формула изобретения
1. Захват для изделий с внутренней полостью, содержащий несущую ось, навешиваемую на грузоподъемный механизм, проушину, кинематически связанную с несущей осью, и закрепленные на концах несущей оси захватные башмаки, отличающи й- с я тем, что, с целью повышения грузоподъемности, несущая ось выполнена из подвижных вдоль горизонтальной оси полуосей, захватные башмаки выполнены с упорным клиновым зубом на верхней рабочей поверхности, а захват снабжен охватывающей полуоси втулкой, связанной с проушиной и пластинчатой пружиной, прикрепленной к башмакам под полуосями и приспособлением для раздвижения последних .
2.Захват по п. 1, отличающийся тем, что приспособление для раздвижения полуосей представляет собой пару винт-гайка, в которой резьбы выполнены на смежных концах полуосей и на внутренней поверхности втулки, при этом проушина жестко соединена с последней.
3.Захват по п. 1, отличающийся тем, что приспособление для раздвижения полуосей представляет собой эксцентрик, жестко связанный с проушиной.
4.Захват по п. 1, о т л и ч- а ю- щ и и с я тем, что приспособление для разцвижения представляет собой жестко связанный с проушиной клин.
г пф
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для строительных изделий с внутренними полостями | 1980 |
|
SU872432A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1982 |
|
SU1096190A1 |
| Рычажно-клиновой захват для грузов с вертикальным цилиндрическим отверстием | 1981 |
|
SU1052470A1 |
| Захват | 1984 |
|
SU1193100A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| ОПОРНО-СИЛОВАЯ КОНСТРУКЦИЯ АВТОЭВАКУАТОРА С ЧАСТИЧНОЙ ПОГРУЗКОЙ | 2008 |
|
RU2391228C1 |
| Рычажно-клиновой захват для грузов с осевой полостью | 1981 |
|
SU1131813A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1983 |
|
SU1127839A1 |
| Грузозахватное устройство | 1990 |
|
SU1766815A1 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА И КАРЕТКА ПРИВОДА (ЕЕ ВАРИАНТЫ) | 1993 |
|
RU2057836C1 |





Изобретение относится к грузоподъемным захватам, предназначенным для подъема, транспортировки и монтажа строительных изделий с внутренней полостью, в частности железобетонных пустотных настилов и колонн с пустотами. Цель изобретения - повышение грузоподъемности. Захват состоит из проушины для стропа с крюком, подхватного элемента, взаимодействующего с проушиной и снабженного двумя башмаками, а также упора подхватного элемента и подхватного элемента выполнены с упорным зубом, имеющим клиновую контактную поверхность, соединены между собой упором в виде пластинчатой пружины. Башмаки снабжены полуосями, объединенными общей втулкой. Внутри втулки расположен взаимодействующий с полуосями башмаков раздвижной механизм. Благодаря изобретению повышается несущая способность устройства за счет увеличения призмы выкола бетона. Изобретение также рассматривает частные случаи выполнения раздвижного механизма в виде талрепа, в виде эксцентрика, жестко связанного с проушиной, пропущенной внутрь втулки и находящейся внутри кожуха, а также в виде клина, жестко соединенного с проушиной, на которую свободно надет кожух. 3 з.п. ф-лы, 19 ил.
OSeCSl
Фиг Л
г- О 1Л П LO
LO
О
ю
го
ui ю
S. .3
i- , , , - , j j У У
//////J/ ///////f Л/
ti
13
У/ ///////, ///////// A
Фи.9
70
Щиг.П
ФигЛ
/
то
.SS
W5
Щцг и/
/
Фиг. /з
f-.
o
u-i r. in tn
«tf
s
8
Фиг. 11
8fll
Фи.18
/.7//
y////i //j.
/77//J/ ///////Y / /l/////////////////,
/ /
Фие. 1В
| Захватное устройство для строительных изделий с внутренней полостью | 1982 |
|
SU1096190A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
