1
Изобретение относится к подъемно-транспортному оборудованию.
Известны устройства для захвата грузов с центральным отверстием, содержащие полый корпус с клином внизу и скобой вверху и тросовые подвески, несущие подпружиненные клиновидные кулачки 1.
Недостатком таких устройств является отсутствие автоматизации процесса захвата груза.
Наиболее близким техническим рещением к изобретению является захватное устройство для грузов с центральным отверстием, содержащее опорную плиту, распорные элементы, тягу с клином на конце, взаимодействующим с распорными элементами, и петлю для навещивания на крюк грузоподъемного механизма {2.
Целью изобретения является автоматизация процесса захвата и освобождения груза.
Поставленная цель достигается тем, что предлагаемое устройство снабжено механизмами управления и фиксацииего в рабочем и нерабочем положениях, при этом механизм управления состоит из траверсы, на которой с одной стороны закреплена петля, а с другой - щтанги, несущие на свободных концах распорные элементы и расположенные в направляющих, закрепленных на плите, подпружиненного щтока, проходящего через отверстие, выполненное в траверсе, и шарнирно закрепленного на нижнем конце штока Г-образного рычага, вертикальное плечо которого выполнено в виде кольца, взаимодействующего с крюком, снабженным направляющей планкой и жестко соединенным с плитой, на которой также жестко закреплена тяга с
клином на конце, а механизм фиксации содержит полый корпус, шарнирно закрепленный на траверсе, располол енный в нем подпружиненный стержень, один конец которого шарнирно закреплен на горизонтальном
плече Г-образного рычага, а другой снабжен планкой, и подпружиненную защелку, взаимодействующую с планкой стержня и связанную гибкой тягой с одной из направляющих для штанг.
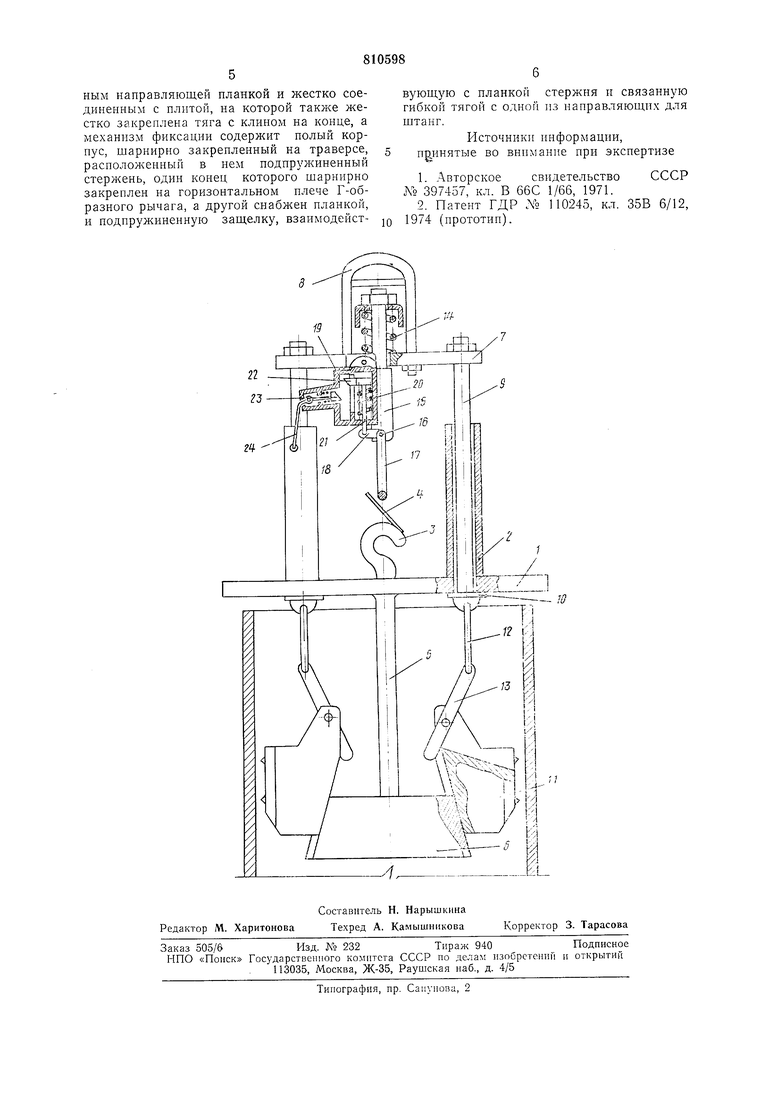
На чертеже показано предлагаемое захватное устройство -для грузов с центральным отверстием, общий вид.
Устройство содержит опорную плиту 1, сверху на плите установлены цилиндрические направляющие 2 и жестко закреплен
крюк 3 с направляющей планкой 4, снизу к
плите также жестко закреплена тяга 5 с
клином 6 на конце.
Устройство также содержит механизмы
управления и фиксации его в рабочем и нерабочем положениях, при этом механизм управления состоит из траверсы 7, с одной стороны которой закреплена петля 8 для навешивания на крюк грузоподъемного механизма, а с другой установлены штанги 9, перемеш,аюшиеся в направляюш,их 2 плиты 1, с буртиками 10 на свободных концах, к которым шарнирно крепятся распорные элементы, выполненные в виде кулачков И, шарнирно связанных с тягами 12 через промежуточные рычаги 13.
Под петлей 8 в средней части траверсы 7 выполнено отверстие, в котором с возможностью перемешения установлен подпружиненный пружиной 14 шток 15. На нижнем конце штока шарнирно закреплен Г-образный рычаг 16, вертикальное плечо 17 которого выполнено в виде кольца, взаимодействуюш,его с крюком 3, снабженным направляющей планкой 4, а горизонтальное плечо 18 шарнирно связано с механизмом фиксации. Последний содержит полый корпус 19, шарнирно закрепленный на траверсе 7, расположенный в нем подпружиненный пружиной 20 стержень 21, один конец которого шарнирно з-акреплен на горизонтальном плече 18 рычага 16, а другой снабжен планкой 22, и подпружиненную зашелку 23, взаимодействующую с планкой 22 стержня 21 и связанную гибкой тягой 24 с одной из направляющих 2 для штанг 9.
Устройство работает следующим образом.
В нерабочем положении устройство петлей 8 подвешено к крюку грузоподъемного механизма, опорная плита 1 опирается на буртик 10 штанг 9, а клин 6 опущен относительно кулачков 11. Для того чтобы поднять груз, захват вводится во внутреннюю полость изделия до тех пор, пока опорная плита 1 с клином 6 не опустится на торец изделия, а траверса 7, продолжая опускаться под действием собственного веса, опирается на направляющие 2 плиты 1.
Одновременно с опусканием траверсы 7 кулачки 11, связанные со штангами 9 посредством тяг 12 и рычагов 13, опускаются по направляющим клина 6 до упора боковыми гранями в стенки изделия.
При этом совместно с траверсой 7 дважется вниз шток 15 с рычагом 16, его вертикальное плечо 17 скользит по направляющей планке 4 вниз, одновременно поворачиваясь в шарнире штока 15. Рычаг 16 также начинает поворачиваться и горизонтальным плечом 18 приводит в движение стержень 21 с планкой 22, который сжимает пружину 20. Усилие от сжатой пружины 20 плотнее прижимает вертикальное плечо 17 к направляющей планке 4 и вводит его в зацепление с крюком 3. Начинается подъем груза.
При подъеме груза клин 6 прижимает кулачки 11 к стенкам груза и надежно его удерживает. Шток 15 под действием веса
груза опускается и сжимает пружину 14. Вместе со штоком 15 стержень 21 движется вниз относительно корпуса 19 фиксатора, пружина 20 сжимается, а планка 22 опускается и фиксируется защелкой 23.
Для того чтобы освободить захватное устройство от груза, необходимо установить груз на место и ослабить трос грузоподъемного механизма. За счет этого пружина 14 разжимается и поднимает шток 15. Вертикальное плечо 17 рычага 16 также поднимается при неподвижной точке крепления стержня 21 к горизонтальному плечу 18, в результате чего рычаг 16 поворачивается относительно штока 15 на некоторый угол, за счет чего вертикальное плечо 17 занимает наклонное положение.
При опускании траверсы 7 до упора в направляющие 2 вертикальное место 17 рычага 16 выводится из зацепления с крюком и остается в наклонном положении. После этого траверсу 7 поднимают. Штанги 9 натягивают тяги 12 и выводят кулачки 11 из зацепления с грузом.
Происходит освобождение груза. При дальнейшем подъеме траверсы 7 относительно опорной плиты 1 натягивается гибкая тяга 24, которая оттягивает защелку 23. Защелка 23 освобождает планку 22. Пружина 20 разжимается, поднимая стержень 21, а вертикальное плечо 17 занимает вертикальное полол ение. Буртики 10 в этот момент упираются в опорную плиту 1. Затем захватное устройство выводится из полости груза.
Наличие в предлагаемом устройстве механизмов управления и фиксации его в рабочем и нерабочем положениях обеспечивает автоматический захват и освобождение груза.
Формула изобретения
Захватное устройство для грузов с центральным отверстием, содержащее опорную плиту, распорные элементы, тягу с клином на конце, взаимодействующим с распорными элементами, и петлю для навешивания на крюк грузоподъемного механизма, отличающееся тем, что, с целью автоматизации процесса захвата и освобождения груза, устройство снабжено механизмами управления и фиксации его в рабочем и нерабочем положениях, при этом механизм управления состоит из траверсы, на которой с одной стороны закреплена петля, а с другой - штанги, несущие на свободных концах ра.спорные элементы и расположенные в направляющих, закрепленных на плите, подпружиненного штока, проходящего через отверстие, выполненное в траверсе, и шарнирно закрепленного на нижнем конце штока Г-образного рычага, вертикальное плечо которого выполнено в виде кольца, взаимодействующего с крюком, снабжен
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| Устройство для разрушения высокопрочных материалов | 1983 |
|
SU1105574A1 |
| УСТРОЙСТВО ПОГРУЗКИ-ВЫГРУЗКИ ГРУЗА НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2010 |
|
RU2422319C1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Захватное устройство | 1985 |
|
SU1306887A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2614873C1 |
