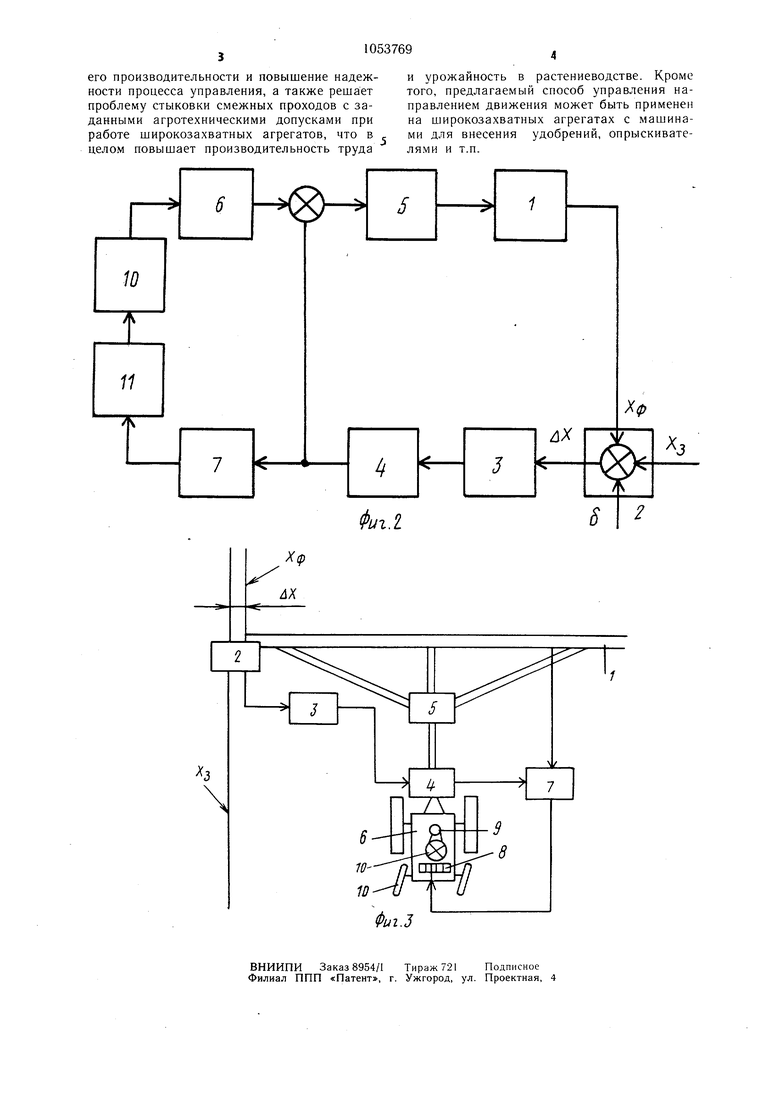
Изобретение относится к сельскому хозяйству, в частности к способам автоматизации процессов управления направлением движения машинно-тракторных агрегатов, в состав которых входит широкозахватная сельскохозяйственная машина. Известен способ управления направлением движения машинно-тракторного агрегата, состоящего из энергетического средства и сельскохозяйственной машины, заключающийся в том, что непрерывно измеряют отклонение сельскохозяйственной машины от заданной траектории движения, в зависимости от полученного значения отклонения перемеш.ают сельскохозяйственную машину относительно энергетического средства и управляют направлением движения энергети ческого средства 1. Недостатком известного способа является возможность .его применения только при агрегатировании с узкозахватными машинами, и, следовательно, невысокая производительность всего агрегата. Невозможность управления направлением движения широкозахватных машин по известному способу объясняется отсутствием в нем контроля положения сельскохозяйственной машины относительно энергетического средства, что приводит к значительной асимметрии сельскохозяйственной машины относительно энергетического средства, снижает надежность процесса управления ,и точность стыковки смежных проходов. Цель изобретения - увеличение производительности машинно-тракторного агрегата с широкозахватной сельскохозяйственной машиной и повышение надежности процесса управления. Поставленная цель достигается тем, что дополнительно непрерывно измеряют отклонение продольной оси широкозахватной сель скохозяйственной машины от продольной оси энергетического средства и в зависимости от полученного значения отклонения осуществляют управление направлением движения. энергетического средства для сохранения их соосности. На фиг. 1 показана функциональная схема системы, реализующая способ, управления направлением движения машинно-тракторного агрегата с широкозахватной сельскохозяйственной машиной в режиме ручного управления; на фиг. 2 - то же в режиме автоматического управления; на фиг. 3 - схема реализации способа посредством оснащения машинно-тракторного агрегата системои управления. Способ осуществляется посредством устройства, содержащего широкозахватную сельскохозяйственную машину 1 с датчиками 2 усилителя-преобразователя 3, исполнительный механизм 4, прицепное устройство 5, энерг(тическое средство 6, датчик 7 взаимного положения, визуальный индикатор 8, оператор 9, механизм 10 управления направлением движения и усилитель-преобразователь 11. Способ реализуется следующим образом. При боковом уходе широкозахватной сельскохозяйственной машины I от заданной траектории Хз посредством датчика 2 отклонения определяют величину отклонения ЛХ фактической траектории Х(р,.Полученный при этом сигнал поперечного ухода обрабатывают и усиливают с помощью усилителяпреобразователя 3 и подают на вход исполнительного механизма 4, который формирует управляющее воздействие, передаваемое широкозахватной сельскохозяйственной машине 1 через- прицепное устройство 5 и позволяющее скомпенсировать боковой уход широкозахватной сельскохозяйственной машины 1 от заданной траектории Xj. Таким образом, широкозахватная машина 1 отслеживает заданную траекторию движения ХзПри этом поддержание симметричного положения энергетического средства 6 относительно широкозахватной сельскохозяйственной машины 1 обеспечивают вторым контуром системы управления движением широкозахватного агрегата. Степень асимметрии регистрируют датчиком 7 взаимного положения, сигнал с выхода которого передают с помощью визуального индикатора 8 оператору 9. Оператор 9 анализирует получаемую информацию и вырабатывает с помощью .механизма 10 управления направлением движения корректирующее воз.аействие, заставляющее энергетическое средство 6 оставаться в симметричном положении относительно широкозахватной сельскохозяйственной машины 1. Процесс поддержания симметричного положения энергетического средстваб относительно широкозахватной сатьскохозяйственной машины 1 в режиме автоматического управления (фиг. 2) отличается от рассмотренной выше функциональной схемы тем, что датчика 7 взаимного положения соединяют с входом усилителя-преобразователя 11, а выход последнего подключают к входу механизма 10 управления направлением движения. При этом принцип работы системы отличается от вышеизложенного тем, что в случае отклонения энергетического средства 6 от симметричного положения относительно широкозахватной сельскохозяйственной машины 1 сигна.т датчика 7 взаимного положения после усиления и обработки в усилителе-преобразователе 11, подают на вход механизма 10 управления направлением движением, который формирует воздействие, управляюшее направлением движения энергетического средства б, компенсирующее его боковой уход. Использование предлагаемого способа упpaBv eния движением машинно-тракторного агрегата с широкозахватной сельскохозяйственной .машиной обеспечивает увеличение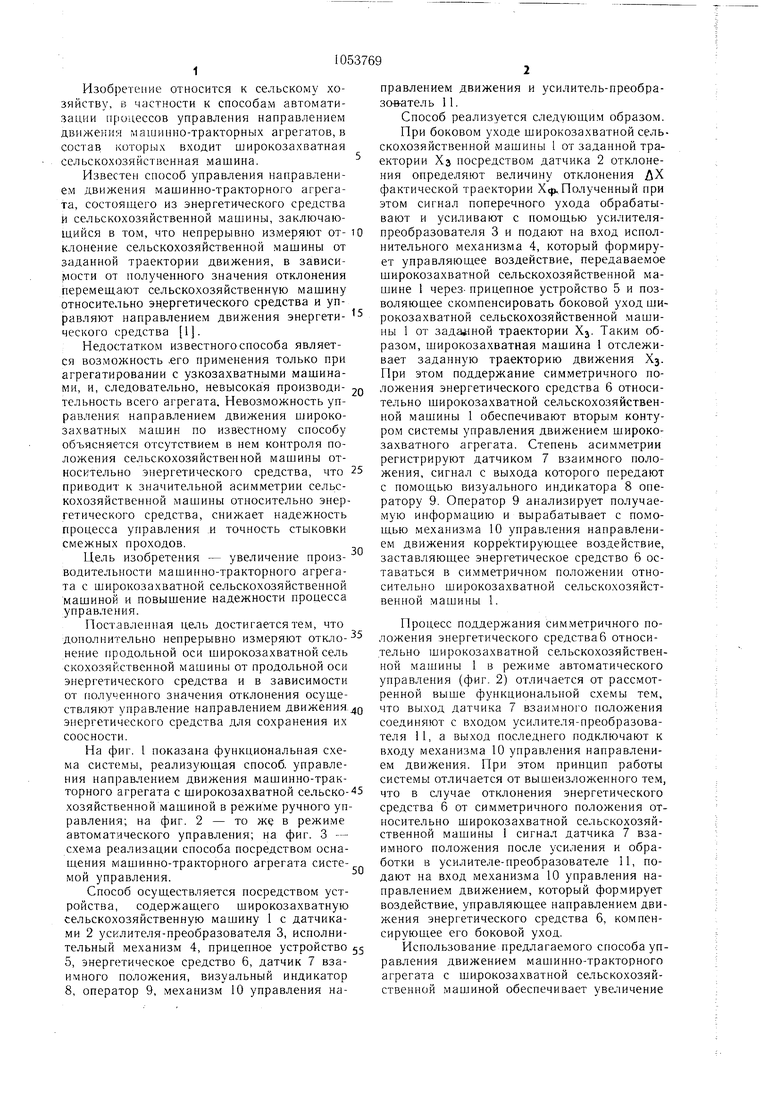
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ направления движения машинно-тракторного агрегата и устройство для его осуществления | 1987 |
|
SU1690572A1 |
| Беспилотный тягово-энергетический модуль сельскохозяйственного назначения и способ его агрегатирования с сельскохозяйственными машинами | 2022 |
|
RU2805880C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ УБОРОЧНЫЙ АГРЕГАТ | 1991 |
|
RU2028035C1 |
| ТРАКТОРНЫЙ АГРЕГАТ | 2004 |
|
RU2259030C1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКВИДИСТАНТНЫМ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО И ЛИНЕЙНО-БОКОВОГО ОТКЛОНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТ ОПОРНОЙ ТРАЕКТОРИИ | 1992 |
|
RU2032926C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ЗЕРНОУБОРОЧНЫЙ АГРЕГАТ МОДУЛЬНОГО ПОСТРОЕНИЯ | 2016 |
|
RU2643710C2 |
| ЭЛЕКТРОННО-ОПТИЧЕСКИЙ СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИИ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2009 |
|
RU2423042C2 |
| ОРИЕНТИР | 1995 |
|
RU2090993C1 |
СПОСОБ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ МАШИННОТРАКТОРНОГО АГРЕГАТА, состоящего из энергетического средства и сельскохозяйственной машины, заключаюшийся в том, что непрерывно измеряют отклонение сельскохозяйственной машины от заданной траектории движения, в зависимости от полученного значения отклонения перемещают сельскохозяйственную маидину относительно энергетического средства и управляют направлением движения энергетического средства, отличающийся тем, что, с целью увеличения производительности агрегата с широкозахватной сельскохозяйственной машиной и повышения надежности процесса управления, дополнительно непрерывно измеряют отклонение продольной оси широкозахватной сель.скохозяйственной машины от продольной оси энергетического средства и в зависимости от полученного значения отклонения осуществляют управление направлением дви- § жения энергетического средства для сохра(Л нения их соосности. ел 00 О5 со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4180133, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
