///////////// ///У/
Изобретение относится к механизации сельскохозяйственного производства, в частности к способам и устройствам для направления сельскохозяйственных машин и орудий вдоль желаемой колеи.
Цель изобретения - увеличение производительности, повышение качества.
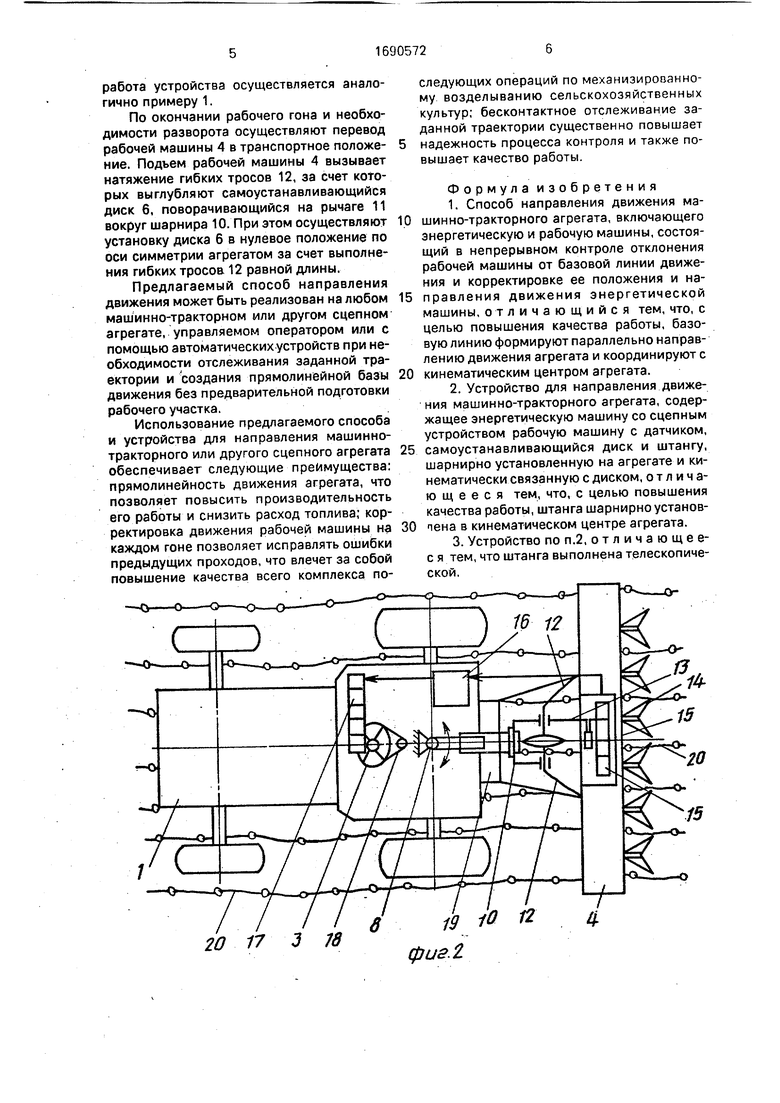
На фиг.1 схематично изображено устройство, реализующее предлагаемый способ, вид сбоку; на фиг.2 - то же, вид сверху.
Способ направления машинно-тракторного или другого сцепного агрегата, состоящего из энергетической и рабочей машины, заключается в том, что управляют энергетической машиной, копируя заданную траекторию движения рядок сельскохозяйственных культур, одновременно непрерывно измеряют отклонение рабочей машины от базовой линии движения, которую формируют агрегатом параллельно заданному направлению движения, фиксируя положение его кинематического центра. В зависимости от величины и направления отклонения рабочей машины от базовой линии движения корректируют положение рабочей машины, перемещая ее относительно энергетической машины в поперечной плоскости, и, если этим не обеспечивается компенсирование отклонения, то дополнительно управляют направлением движения энергетической машины.
Устройство, осуществляющее.способ, содержит энергетическую машину 1 со сцепным устройством 2 и механизмом 3 управления, рабочую машину 4 с датчиком 5, самоустанавливающийся диск 6, установленный на телескопической штанге 7, закрепленной шарнирно в кинематическом центре 8 агрегата. Телескопическая штанга 7 имеет фиксатор 9 длины и шарнир 10, к которому прикреплен рычаг 11 самоустанавливающегося диска 6. Рычаг 11 соединен двумя гибкими тросами 12 со сцепным устройством 2 и имеет стойку 13, на которой установлен подвижный элемент 14 датчика 5 любой известной конструкции, например, в виде блока герконов 15 и магнита 14. Датчик имеет электрическую связь с усилителем-преобразователем 16 и визуальным индикатором 17, установленным в поле зрения оператора 18. Сцепное устройство 2 имеет силовой орган 19 любой известной конструкции, например, в виде гидроцилиндра, выполненный с возможностью перемещать рабочую машину 4 относительно энергетической машины 1 в поперечной плоскости по отношению к направлению заданной траектории 20 движения, например, рядка сельскохозяйственных культур.
Примеры осуществления предлагаемого способа направления машинно-тракторного или другого сцепного агрегата.
П р и м е р 1. При выполнении агрегатом
технологической операции, требующей соблюдения прямолинейности движения, например, при посеве сельскохозяйственных культур телескопическую штангу 7 устанавливают на максимальную длину и стопорят
фиксатором 9. На рабочем гоне агрегат направляют по заданной траектории 20 движения, например, маркерной линии. При этом кинематический центр 8 агрегата, находящийся, например, для энергетического
. средства с колесной формулой 4x2 на пересечении продольной оси симметрии и оси заднего ведущего моста энергетической машины 1, испытывает существенно меньшие отклонения отклик в поперечном направлении по сравнению с любой точкой навесного агрегата, поэтому самоустанавливающимся диском 6 формируют достаточно прямолинейную базовую линию параллельно направлению движения агрегата за счет сил, возникающих при резании почвы диском 6.
Датчиком 5 определяют величину и направление отклонения фактической траектории рабочей машины 4 от базовой линии
движения. Полученный при этом сигнал поперечного ухода обрабатывают и усиливают с помощью усилителя-преобразователя 16 и подают на вход силового органа 19, который формирует управляющее воздействие, позволяющее скорректировать боковой уход рабочей машины 4. Если не обеспечивается заданный режим корректировки, то через определенный интервал времени поступает сигнал на визуальный
индикатор 17 оператору 18, который осуществляет корректировку направления движения агрегата, воздействуя на механизм 3 управления. Таким образом, рабочая машина 4 осуществляет направленное прямолинейное движение вдоль заданной траектории 20 движения.
П р и м е р 2. При выполнении агрегатом технологической операции, требующей отслеживания заданной траектории 20 движения, например при междурядной обработке сельскохозяйственных культур, телескопическую штангу 7 устанавливают в положение, соответствующее степени искривления заданной траектории 20 движения и стопорят фиксатором 9, На рабочем гоне самоустанавливающийся диск 6 описывает траекторию, близкую к заданной траектории 20 движения с исправлением незначительных искривлений последней. Далее
работа устройства осуществляется аналогично примеру 1.
По окончании рабочего гона и необходимости разворота осуществляют перевод рабочей машины 4 в транспортное положе- ние. Подъем рабочей машины 4 вызывает натяжение гибких тросов 12, за счет которых выглубляют самоустанавливающийся диск 6, поворачивающийся на рычаге 11 вокруг шарнира 10. При этом осуществляют установку диска б в нулевое положение по оси симметрии агрегатом за счет выполнения гибких тросоа 12 равной длины.
Предлагаемый способ направления движения может быть реализован на любом машинно-тракторном или другом сцепном агрегате, управляемом оператором или с помощью автоматических устройств при необходимости отслеживания заданной траектории и создания прямолинейной базы движения без предварительной подготовки рабочего участка.
Использование предлагаемого способа и устройства для направления машинно- тракторного или другого сцепного агрегата обеспечивает следующие преимущества: прямолинейность движения агрегата, что позволяет повысить производительность его работы и снизить расход топлива; корректировка движения рабочей машины на каждом гоне позволяет исправлять ошибки предыдущих проходов, что влечет за собой повышение качества всего комплекса последующих операций по механизированному возделыванию сельскохозяйственных культур; бесконтактное отслеживание заданной траектории существенно повышает надежность процесса контроля и также повышает качество работы,
Формула изобретения
1.Способ направления движения машинно-тракторного агрегата, включающего энергетическую и рабочую машины, состоящий в непрерывном контроле отклонения рабочей машины от базовой линии движения и корректировке ее положения и направления движения энергетической машины, отличающийся тем, что, с целью повышения качества работы, базовую линию формируют параллельно направлению движения агрегата и координируют с кинематическим центром агрегата.
2.Устройство для направления движения машинно-тракторного агрегата, содержащее энергетическую машину со сцепным устройством рабочую машину с датчиком, самоустанавливающийся диск и штангу, шарнирно установленную на агрегате и кинематически связанную с диском, отличающееся тем, что, с целью повышения качества работы, штанга шарнирно установ- ена в кинематическом центре агрегата.
3.Устройство по п,2, отличающее- с я тем, что штанга выполнена телескопической.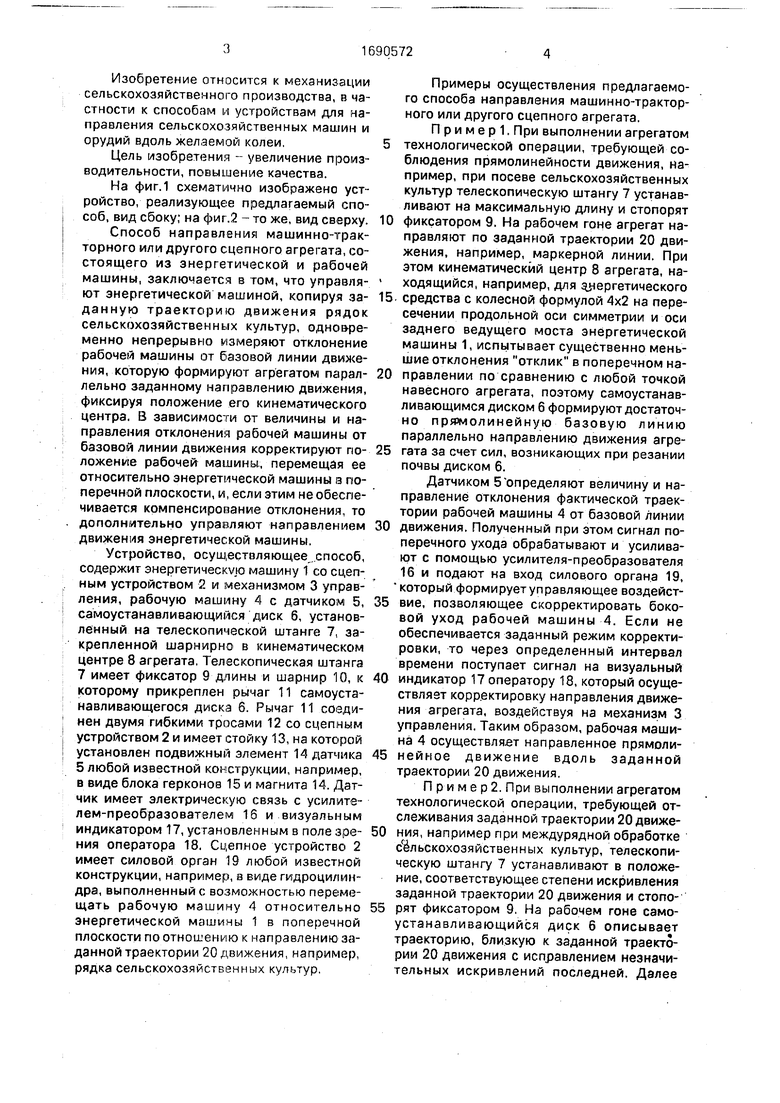
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОРНЫЙ АГРЕГАТ | 2004 |
|
RU2259030C1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР УГЛА ЗАГЛУБЛЕНИЯ РАБОЧЕГО ОРГАНА СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ, АГРЕГАТИРУЕМОГО УНИВЕРСАЛЬНЫМ ФРОНТАЛЬНЫМ ГИДРОНАВЕСНЫМ УСТРОЙСТВОМ ДЛЯ КОЛЕСНОГО ТРАКТОРА КЛАССА 1,4 | 2012 |
|
RU2497336C1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |
| Корректор веса универсального фронтального гидронавесного устройства для колесного трактора класса 1,4 | 2016 |
|
RU2650385C1 |
Изобретение относится х способам и устройствам для направления сельскохозяйственных машин и орудий вдоль желаемой колеи. Цель изобретения - увеличение производительности и повышение качества контроля. Базовую линию движения координируют с кинематическим центром за счет шарнира, к которому посредством телескопической штанги 7 прикреплен самоустанавливающийся диск 6. При первоначальном проходе агрегата телескопическая штанга 7 максимально удлиняется и диск 6 осуществляет прямолинейное движение. При отслеживании агрегатом заданной траектории движения телескопическая штанга 7 устанавливается в положение, соответствующее степени ее искривления, диск 6 описывает траекторию, близкую к заданной. Датчиком непрерывно измеряется отклонение рабочей машины от положения самоустанавливающегося диска и через усилитель-преобразователь подается сигнал на силовой орган, корректирующий боковой уход рабочей машины, а при необходимости и на визуальный индикатор оператору, осуществляющему корректировку направления движения машинно-тракторного агрегата. 2 с. и 1 з.п. ф-лы, 2 ил. (Л С
20 17 3 78
8
19 10 ft Ц.
t
фиг.г
| Патент США № 4180133, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU338183A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
