Высотомеры для производства измерений относительных высот местности, устанавливаемые на движущемся экипаже, снабженные маятником и интегрирующим устройством, известны. Их недостатком является влияние ускорений экипажа на точность измерений.
В описываемом высотомере производится измерение действующих на маятник сил, интегрирование величин которых на отрезке пути, для которого определяются относительные высоты, дает величину превыщений. Это повыщает точность измерения, так как при интегрировании сил, действующих на маятник, влияние ускорений экипажа на измерения исключается.
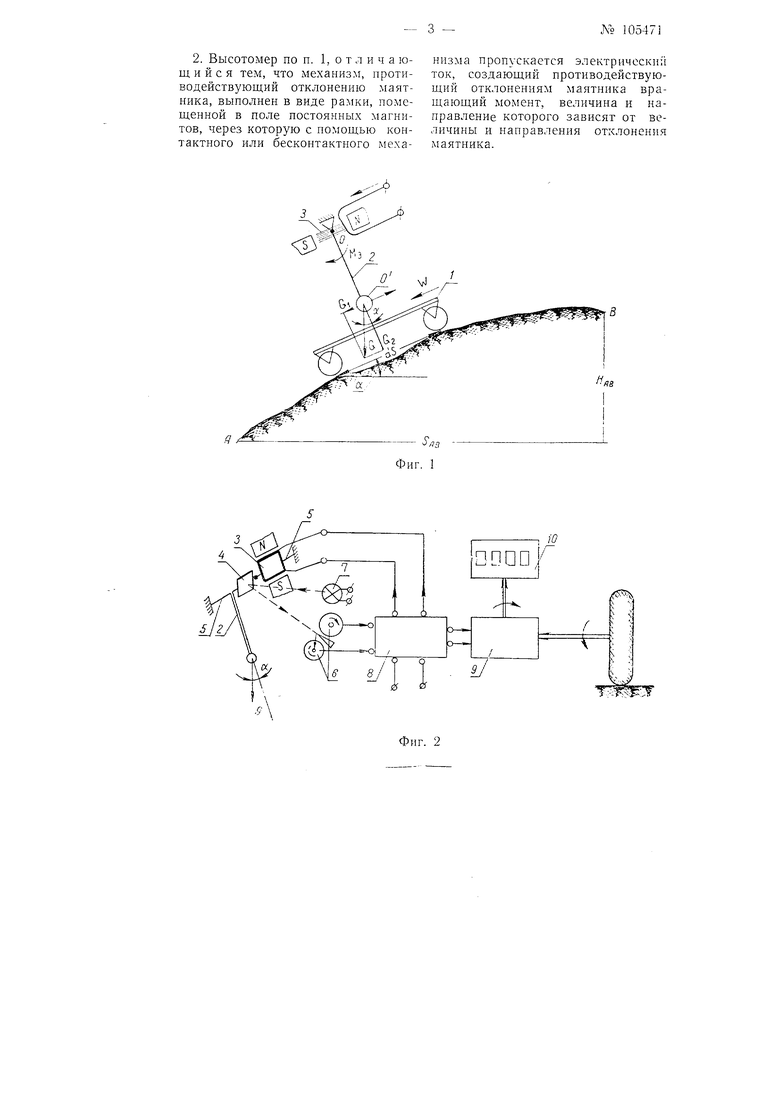
Высотомер показан на фиг. 1 и 2.
На повозке / подвещен маятник.. С маятником связана рамка 3, находящаяся в поле постоянного магнита NS. Электромагнитный момент, действующий на маятник, пропорционален току i, протекающему в рамке. Величина тока устанавливается такой, чтобы электромагнитный момент уравновещивал маятник в положении, при котором
направление 00 перпендикулярно основанию повозки. Когда повозка неподвижна, на маятник действует HiqHaBd г) июэжкх нииэ ю л,нэ1мок -- Gl sin а, где а - угол профиля местности, а / - расстояние от точки подвеса до центра тяжести маятника. При движении повозки с линейным ускорением W возникает динамический момент дан mW 1,тл& т - масса маятника. Таким образом, электромагнитный момент М должен уравновещивать моменты М и М „„, т. е.
ст + д,ш Проинтегрировав значение тока i КМз, устанавливаемого непрерывно в рамке при движении повозки, получим;
..dS +
+ ,,,dS SA
Интеграл M.dS
JJ
SASA
представляет собой величину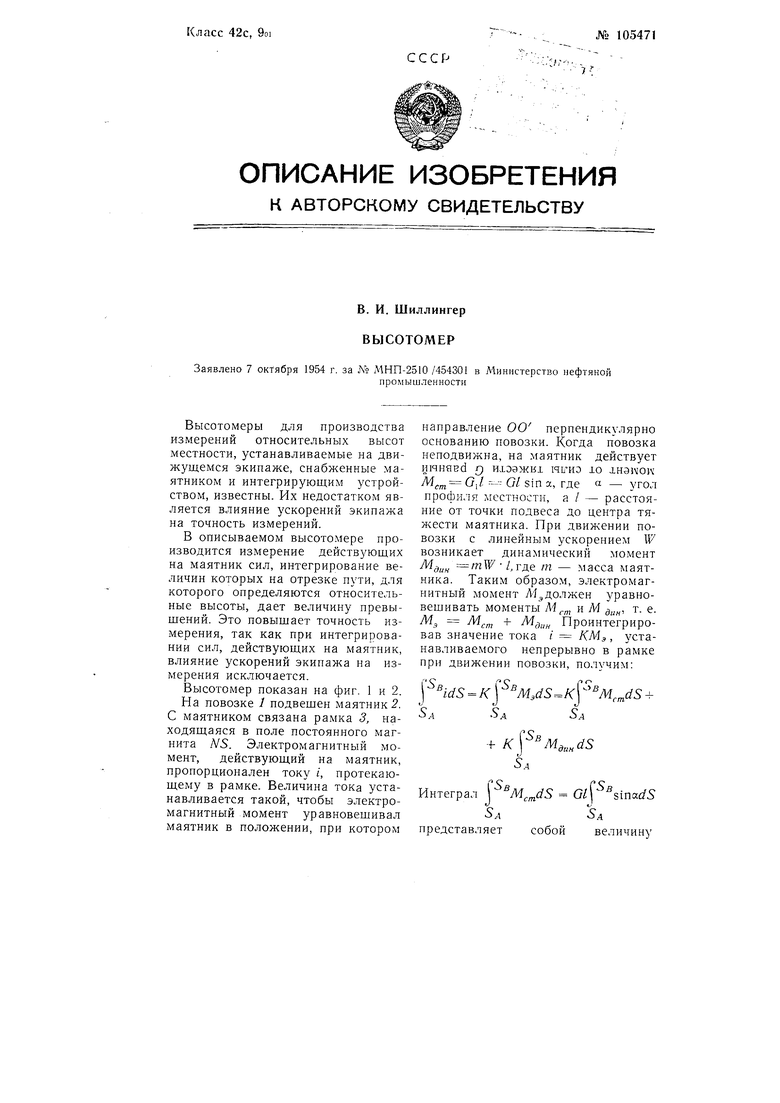
| название | год | авторы | номер документа |
|---|---|---|---|
| Счетное устройство к высотомеру | 1952 |
|
SU98089A1 |
| Прибор для автоматического нивелирования местности | 1948 |
|
SU86848A1 |
| Устройство для измерения высоты местности | 1951 |
|
SU101153A1 |
| Декадный потенциометр | 1944 |
|
SU67707A1 |
| Прибор для автоматического нивелирования местности | 1956 |
|
SU124145A2 |
| Высотомер-автомат | 1987 |
|
SU1509591A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1964 |
|
SU164973A1 |
| Способ определения барометрической высоты летательного аппарата в полете с использованием бортовых спутниковых навигационных приемников и авиационных метеорологических прогнозов | 2024 |
|
RU2824733C1 |
| Устройство для определения угла наклона объекта | 1980 |
|
SU924505A1 |
| Способ автоматического определения превышений точек местности | 1982 |
|
SU1073577A1 |