Известны гравиметры, содержащие горизонтально ориентированный упругий маятник, электрические фильтры, демпфирующую и арретирующую системы.
Отличие предложенного устройства от известных заключается в том, что в нем бесконтактный преобразователь углового перемещения горизонтального маятника подключен на моментный электрический датчик, момент которого уравновешивает момент силы тяжести. Это позволяет повысить чувствительность и точность телеизмерений и обеспечивает дистанционное управление устройством.
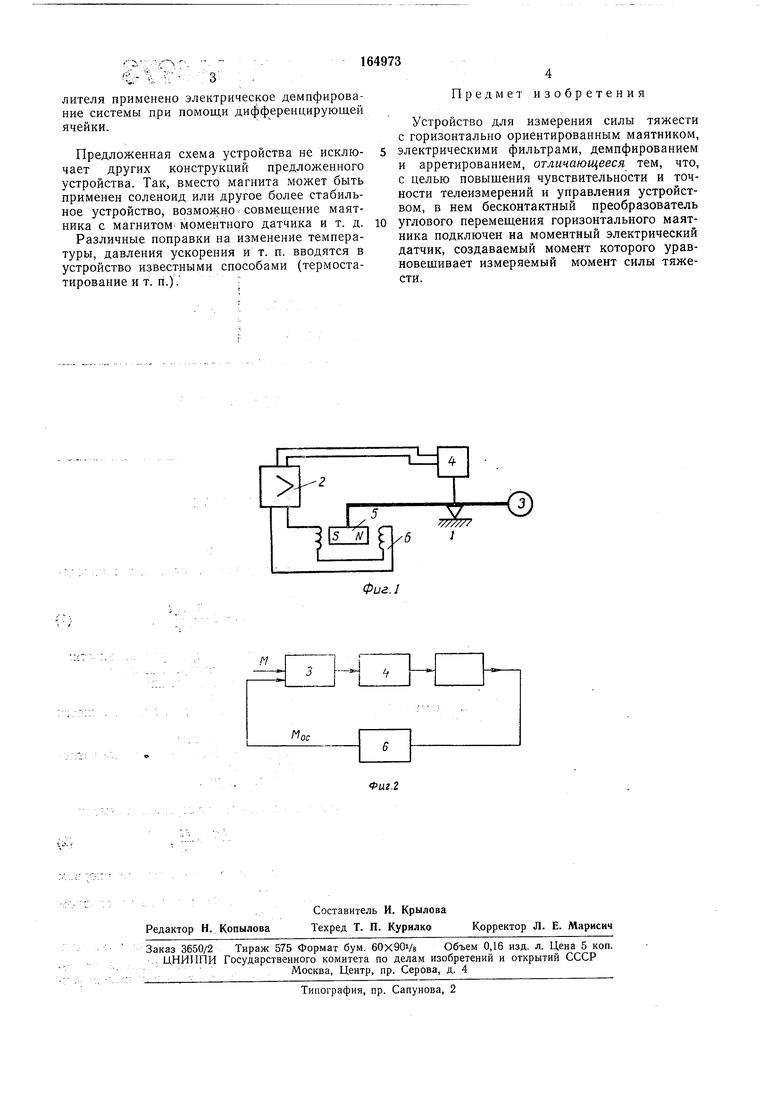
На фиг. 1 приведена принципиальная схема устройства; на фиг. 2 - его блок-схема.
На оси / размещены маятник 3, бесконтактный преобразователь углового перемещения в электрический ток и постоянный магнит 5 моментного датчика. Кроме того, на чертеже показаны рамки датчика 6 и усилитель 2.
Под действием момента М силы тяжести маятник поворачивается, что вызывает появление сигнала рассогласования с преобразователя углового перемещения. Этот сигнал усиливается и преобразуется в ток /, протекающий через рамку моментного датчика. Взаимодействие этого тока с полем постоянного магнита создает противодействующий момент Мое, уравновешивающий момент силы тяжести.
Величина ускорения силы тяжести определяется как
Blnr i
(1)
ё-К mr
где К - коэффициент пропорциональности; В -индукция в зазоре магнита; / - активная длина рамки; л - число витков; г -расстояние от оси до центра тяжести
маятника;
/ - сила тока в рамке; г„-плечо приложенной силы моментного датчика; т - масса маятника.
При относительных измерениях тяжести -
(2)
где 0 - ускорение силы тяжести на опорном
пункте; го -величина тока в рамке на опорном
пункте;
А/ -цриращение силы тока; Ag -приращение ускорения силы тяжести.
лителя применено электрическое демпфирование системы при помощи дифференцирующей ячейки.
Предложенная схема устройства не исключает других конструкций предложенного устройства. Так, вместо магнита может быть применен соленоид или другое более стабильное устройство, возможно совмещение маятника с магнитом моментного датчика и т. д.
Различные поправки на изменение температуры, давления ускорения и т. п. вводятся в устройство известными способами (термостатирование и т. ri.).;
Предмет изобретения
Устройство для Измерения силы тяжести с горизонтально ориентированным маятником, электрическими фильтрами, демпфированием и арретированием, отличающееся тем, что, с целью повышения чувствительности и точности телеизмерений и управления устройством, в нем бесконтактный преобразователь углового перемещения горизонтального маятника подключен на моментный электрический датчик, создаваемый момент которого уравновещивает измеряемый момент силы тяжести.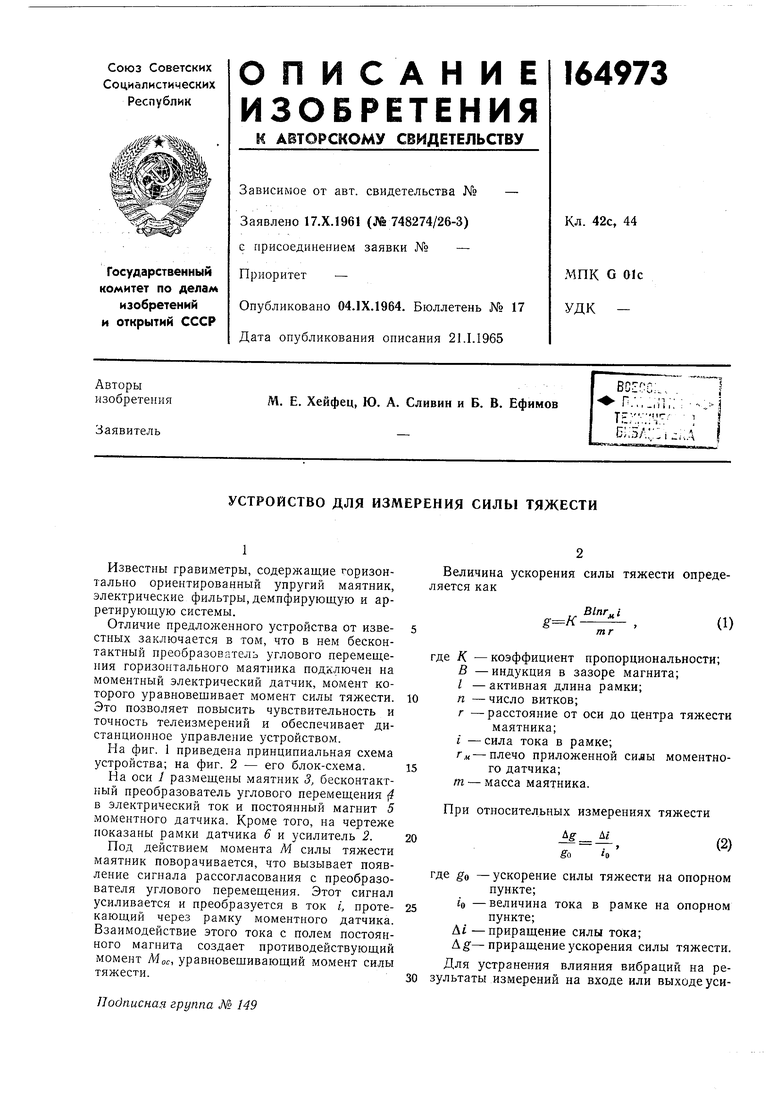
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1964 |
|
SU164972A1 |
| Устройство для измерения силы тяжести | 1974 |
|
SU575596A1 |
| Устройство для измерения силы тяжести | 1984 |
|
SU1226388A1 |
| ГИРОСКОПИЧЕСКИЙ ГРАВИМЕТР | 1971 |
|
SU297016A1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Устройство для испытаний наклономеров | 1978 |
|
SU763685A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ НА подвижном ОСНОВАНИИ | 1965 |
|
SU168477A1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| ГОРИЗОНТАЛЬНЫЙ МАЯТНИКОВЫЙ ИЗМЕРИТЕЛЬ УГЛА | 2013 |
|
RU2563546C2 |
