го соединен с вторым входом 2 ИЛИ первой схемы 1-2ИЛИ- 2И и первым вхо:дом .2 ИЛИ четвертой сх-емы 1-2ИЛИ-2И, ; .третий выход которого соединен с . первым ахбдом 2 .ИЛИ второй схемы 1-2ИЛИ 2И и вторым входом 2 ИЛИ .четвё ртой-схемы 1-2ИЛИ-2И, четвертый выход которого соедянен с вторыми входами 2ИЛИ второй и третьей схем. 1т2ИЛИ-2И выход первого делителя частоты с переменным коэффициентом деления связан с входами 1ИЛИ первой и второй схем 1-2ИЛИ-2И, а выход ВТОРОГО делителя частоты соединен, с
входами 1ИЛИ третьей и четвертой схем 1-2ИЛИ-2И, выходы первой и третьей схем 1-2ИЛИ-2И соединены соответственно с суммирующими входами первого и вторюго реверсивных счетчиков, вычитакедие входы которых связаны с выходами второй и четвертой схем. 1-2ИЛИ-2И, а входы установки нуля,реверсивных счетчиков связаны с кнопкой Пуск , при этом выходы первого и второго -реверсивных счетчиков связаны с третьим и четвертым входами коммутатора аргумента. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Яхтенный авторулевой | 1981 |
|
SU1020311A1 |
| Тренажер по тактике парусных гонок | 1981 |
|
SU1015417A1 |
| Устройство для тренировки и контроля подготовленности яхтсменов | 1987 |
|
SU1572663A1 |
| Устройство для тренировки яхтсменов | 1980 |
|
SU960906A1 |
| Цифровой преобразователь координат | 1981 |
|
SU960834A1 |
| Гироскопическое устройство для определения курса | 1989 |
|
SU1783302A1 |
| Устройство для преобразования координат | 1983 |
|
SU1141405A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Устройство для сжатия информации | 1988 |
|
SU1541646A1 |
| Устройство для обучения и тренировки яхтсменов | 1980 |
|
SU892460A1 |
1. УСТРОЙСТВО ДЛЯ ТРЕНИРОВ-КИ ЯХТСМЕНОВ, содержащее ультразвуковой лаг, включающий пьезоэлектрический преобразиватель, генератор ультразвуковой частоты, приемник, смеситель и цифровой частотомеру о т л и ч а ю щ е с я тем, что, с целью увеличения эффективности подг-ГОТОВКИ и тренировки яхтсменов на воде, в него дополнительно введены гирокомпас, пульты установки курсового угла знака и установки расстояЗапись ния до знака, кнопки и Пуск, блок вычисления координат знака, два регистра хранения координат Хо и Уо знака, блок вычисления текущих координат яхты, коммутатор текущих координат, генератор тактовых импульсов, коммутатор команд, микропроцессор, последовательно соединенный с блоке цифровой инди- нации, причем три входа блока вычисления координат знака подключены к выходам пультов установки курсового угла знака и установки расстояния до знака и кнопке Запись, а его выходы соединены соотьетственно с входом регистра хранения координаты Хо знака и входом регистра хранения координаты Уд знака, выходы которых подключены соответственно к первому и второму входам коммутатора текущих координат, третий -и четвертый входы которого связаны с первым и вторым выходами блока вычисления текущих координат яхты, пятый и шестой входы коммутатора текущих координат связаны с выходом ультразвукового лага и выходом гирокомпаса, седьмой вход коммутатора текущих координат связан с первым выходом генератора тактовых импульсов, второй виход которого соединенС входом коммут.атора команд, выход которого и выход коммутатора текущих координат связаны спервым и вторым входами микропроцессора, а три входа ё блока вычисления текущих координат яхты соответственно соединены с выV) ходами ультразвукового лага, выходом гирокомпаса и кнопкой Пуск. 2. Устройство поп.1,отли-. чающееся тем, что. вычислитель текущих координат яхты содержит два реверсивных счетчика, четыре схемы 1-2 ИЛИ - 2И,-дваделите.ля частоты с переменным коэффициентом деления, дешифратор, вычислительный блок и генератор импульсов , первый вход которого связан с в.ыходом ультразвукового лага, второй - с кнопкой Пуск , а выход - с переменньзми входами первого и второго делителей с переменным коэффициентом деления, вторые входы которых соединены соответственно с первым и вторым выходами вычислительного блока, первый вход которого связан с выходом гирокомпаса-, второй - с кнопкой Пуск, а третий и четвертый выходы вычислительнего блока соответственно подключены к первому и второму входам дешифратора, первый выход которого соединен с первьми входами 2 ИЛИ первой и третьей схем ;1-2ИЛН-2и второй выход которо
: . .- .1 ... Изобретение относится к тренажерам для обучения управлению парусньм судном на воде. . Известно устройство, состоящее из трех плексигласовых дисков нару ного (курсового) , среднего (компасного) и внутреннего (ветрового), соединенных обч1ей осью, причем на .курсовом диске нанесены четыре отме ки, соответствующие курсам гоночной дистанции: А - против ветра, В - по ветру, С - бакштаг правого,галса, D - бакштаг левого галса, на компа ном диске наносятся отметки, соотзветствукадие делениям компаса, а на ветровом диске наносится стрелка.на равления вектора ветраУ при этом устройство устанавливается совместJHO с компасом в.ахте l . Недостатком этого устройства является отсутствие фиксиррзвания мо-мента вьвсода яхты на траверс знака дистанции и погрешность определения точки поворота на другой галс. Известно также устройство для тренировки яхтсменов, содержащее передатчики, установленные на знака ГОНОЧ1НОЙ дистандии, электромеханический лаг и приемник Фазометр, раэме«е«ные;,в яхте {2. Иед эста1к( известного устройства является необходимость установки б6л|)Шого количества передатчиков на ;стационарных буях гоночной дистанци .а.также их перемещение в процессе тренировки при проведении контроля скорости сближения яхты с точками ..эквато рии.,, , :.., .-;.-,:.,. целью изобретения является увели . чениё эффектив|1дсти подготовки и тренировки яктсменод на йоде. Яосгавленная цель достигается тем, .JTO в устройство для.тренйровкк яхтсменов, содерясащеё у;гп траЭву.iKOBOiti лаг .включающий пьеэоэлёктриеский преобразователь, генератор ультразвуковой частоты, приемник, смеситель и цифровой частотомер, дополнительно введены гирокомпас, пульты установки курсового угла знака и Установки расстояния до .. знака, кнопки Запись и Пуск блок вычисления координат знака, два регистра . хранени:я координат Уд знака, блок вычисления текущих координат яхты, коммутатор текущих координат, генератор тактовых импульсов,/коммутатор команд, микропроцессор, последрвательно соединенный с блоком цифровой индика-г циИг причем три входа блока вычисления координат знака подключены к . выходам пультов установки.курсового . угла знака и установки расстояния ; до знака и кнопке Запись, а его выходы соединены соответственно с входом регистра хранения координаты хо и знака и входом :регистра хранения координаты у знака, выходы которых подключены Соответственно к первому И второму входам крммутатора текущих коордиИат,третий и четвертый входы которого связаны с первым и 13тоpbJjji выходами блока . вычисления текущих координат яхты, ПЯТЫЙ и.шестой входы коммутатора текущих координат связаны с внкодом ультразвукового лага ивыХодсм гиро-. компаса, седьмой вход коммутатора текущих координат связан с первым йьаходом генератора тактовых импульсов, второй выходкоторого соединен с входом коммутатора команду выход которого выход коммутатора текущих координат связаны с первьм и втор входами микропроцессора, а т|)и входа блока вычисления-текущих коорJiHHaT яхты соответственно соединены с вьосодами. ультразвукового ласа, .. выходом Гирокомпаса и. кнопкой Пуск.
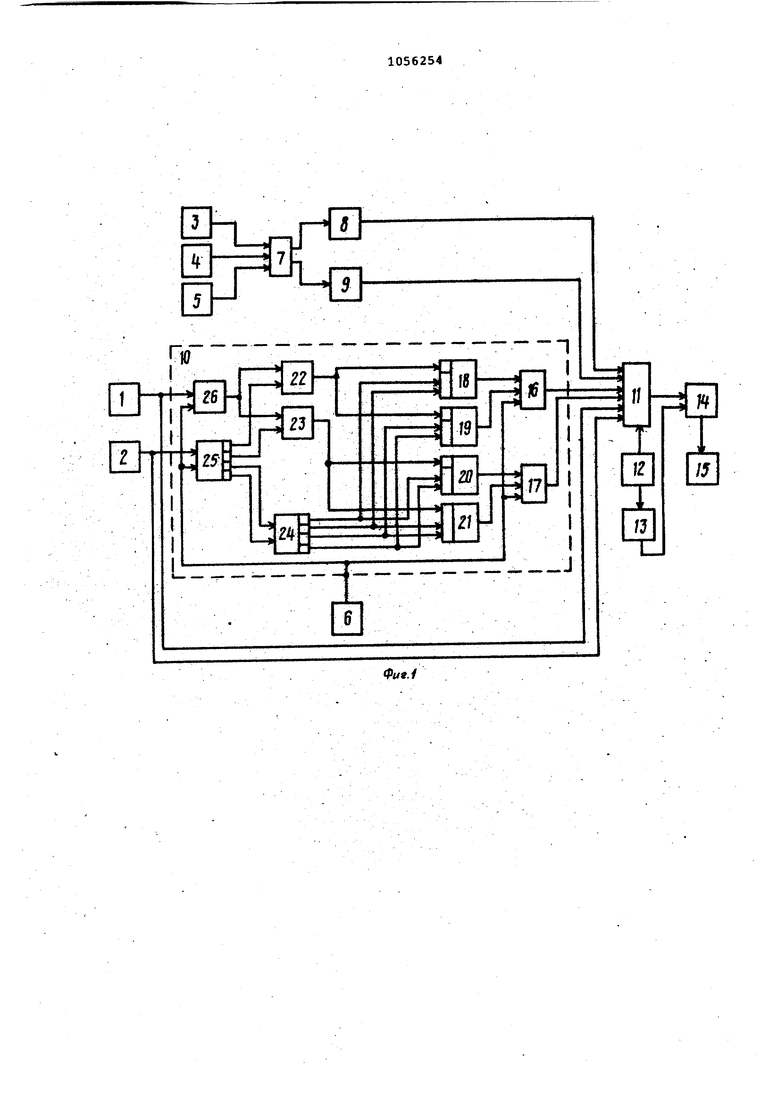
При этом вычислитель текущих координат яхты содержит два реверсивных счетчика, четыре схемы 1-2 ИЛИ-2Идва делителя частоты с переменньм ко.эфициентом. деления, дешифратор, вычислительный блок и генератор импульсов первый вход которого связан с выходом ультразвукового.лага, второй - с кнопкой Пуск, а выход - с первыми входамипервого и второго делителей с переменным коэффициентом деления,вторые входы которых соединены соответственно с -первым и вторым выходами вычислительного блока, первый вход которогсз связан с выходом гирокомпаса, второй - с кнопкой :Пуск , а третий и четвертый выходы вычислительного блока соответственно подключены к. первому и второму входам дешифратора, первый выход которого соединен с перт выми входами 2ИЛИ первой и третьей схем 1-2ИЛИ-2й, второй выход котор ого соединен с вторым входом 2ИЛИ первой схемы 1-2ИЛИ-2И и первым входом 2ИЛИ четвертой схемы 1-2ИЛИ-2И, третий выход которого соединен с первым входом 2ИЛИ второй схемы 1-2ИЛИ-2И и вторым входом . 2ИЛИ четвертой схемы 1-2ИЛИ-2И, четвертый выход которого соединен с вторыми входами 2 ИЛИ второй и третьей схем 1-2ИЛИ-2И, выход первого делителя частоты с rieременньам коэффициентом деления связан с входами 1ИЛИ первой и второй схем 1-2ИЛИ-2И, выход второго делителя частоты соединен с входами 1ИЛИ третьей и четвертой схем 1-2ИЛИ-2И, выходы первой И третьей схем 1-2ИЛИ-2И соединены соответственно с .суммируюваими уходами первого и второго реверсивных счетчиков, вычитающие входы которых связаны с выходами второй и четве той схем 1-2ИЛИ-2И а входы установки нуля реверсивных счетчиков связана с кнопкой-Пуск , при этом выходы первого и второго реверсивных счетовКоза связаны с третьим и четвертые входами коммутатора аргумента. ; ; На фиг.1 изображена схема устройства для тренировки яхтсменой;
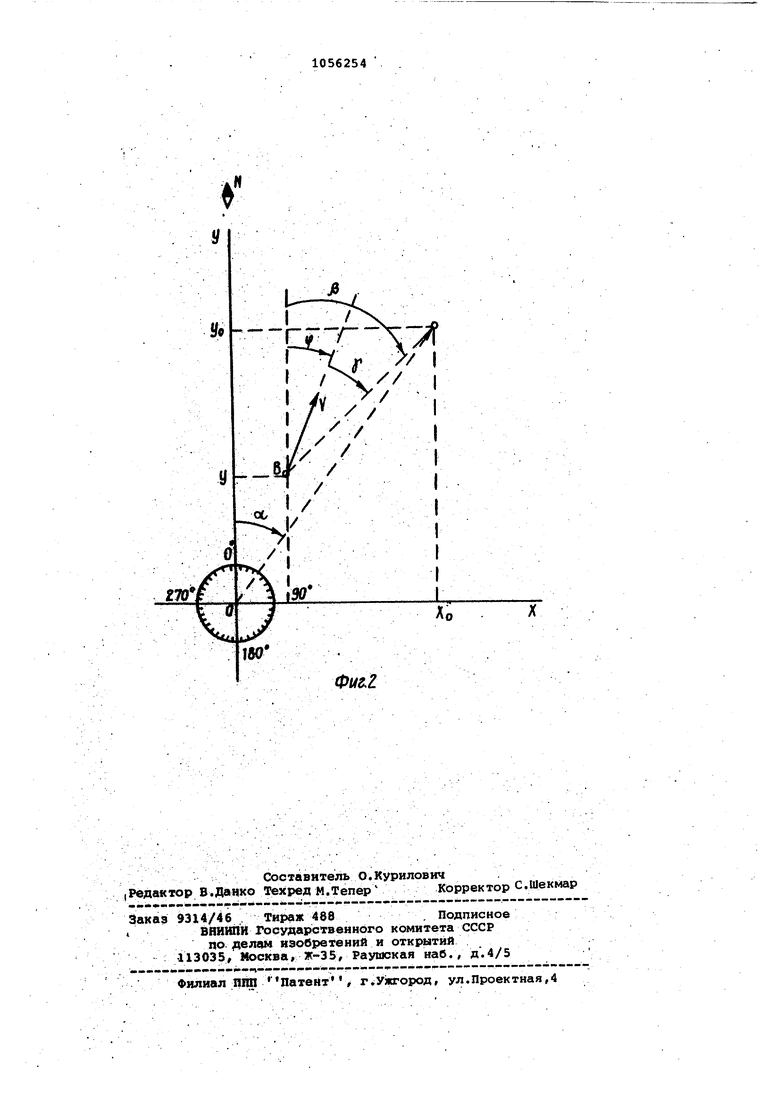
на фиг.2 - навигационная картина, . поясняющая/работу устройства. ;
Устройство для тренировки cnopT-j сменов содержит ультразвуковой nat 1, гирокомпас 2, пул1;Т 3 установки курюового угла.знака пульт 4 установки расстояния до siиакаТ кнопку 5 Запись, кнопку б Пуск, : блок ,7 вычис 1ения координат знака, /регистр 8 хранения координаты Хо знака , регистр 9-хранения коордйна- ты Уо знака, блок 10 вычисления вкущюс координат яхты., коммутатор 11 текущих координат, генератор 12 ;тг1ктовых импульсов, коммутатор команд, микропроцессор 14,
блок 15 цифровой индикации, при этом блок 10 вычисления текущих координат Ххты включает дэа ревер сивных счетчика 16 и 17, четыре схемы 1-2ИЛИ-2И 18-21, два делителя 22 и 23 частоты с переменным коэффи иентом ,дешифратор 24, вы ислительный блок 25 и генератор 26 импульсов.
Обозначения на фиг.2:ХОУ - прямоугольная система координат н&правление оси ОУ совпадает с направлением на норд - OW;.T, А - местоположение знака, на.который нужно выйти яхте; угол ot- курсовой угол знака; R,- расстояние до знака; х и УО координаты знака в собственной прямоугольной системе координат ХОУ; .т. В - текущее местоположение яхты; Ли у - текущие координаты яхты; V -, вектор скорости яхты; tf - курсовой угол яхты;, р - курсовой угол в т. В; у - текущий пеленг знака (т. А); в центре прямоугольных координат ХОУ наложена шкала магнитного компаса.
.Устройство работает следующим образом.
На пульте 3 установки курсового угла и на пульте 4 установки расстояния до знака яхтсмен устанавливает курсовой угол ot и расстояние R до знака, на который надо выйти (эти параметры отсчитываются от судейского судна, находящегося на стартовой линии). После нажатия кнопки 5 Запись/ блок 7 вычисления координат знака определяет координаты знака Jio .« R sinof и Уо rt ,, которые заИ осятся соответственно в регистры в и 9. Параллельно и непрерывно ультразвуковой лаг 1 и гиро. компас 2 измеряют модуль скорости яхты относительно дна и курсовой угол яхты (р . При прохождении яхты
.вблизи судейского судна (в точке О на фиг.. 2) , яхтсмен нажимает кнопку б Пуск, при этом начинают раЧ5отать генератор 26, вычислитель ный блок 25 и устанавливаются в нуль реверсивные счетчики 1 б и 17. Напервый вход делителя частоты 22 поступает импульсная последовательность, частота которой пропорциональна модулю скорости яхты, на его второй вход код, пропорциональный синусу кугхзово угла tf , а: на выходе ,делителя 2 2 частоты получается частота, пропорциональная проекции вектора скорости на ось yj Yij .Vcoscf , Аналогичным образо на выходе делителя 2.3 частоты,получается частота, пройорциональная про: цни вектора скорости на /ось :C:Vx Vsm На третий и четвертый выходы вычисли
тельного .блока 25 поступают сигналы,
i соответствующие знакам плйс или минУ
/соответственно : HSinlf . в зависимости от их комоинации на выходах .дешифратора 24 появляются сигналы: на первом выходе, если курсовой угол яхты находится в интервале 0-90, н фтором выходе, если курсовой угол fixTH находится в интервале 90-180 , :на третьем выходе,если курсовой угол яхты находится в интервале 180-270° на четвертом выходе, если курсовой угол яхты находится ,в интервале 270360°. В Зависимости от соотношения сигналов на выходах дешифратора 24 .схемы 1-2ИЛИ-2И 18-21 пропускают частоты, пропорциональные Vy и V,,, на суммирующие.или вычитающие входы реверсивных сче:тчиков 16 и 17. Напри мер, если яхта движется в первом квадранте (курсовой угол С| - 90 как на фиг.2), то postf и V положительны, на первом выходе дешифратора 24 присутствует сигнал (на других вы ходах де1чифрато0а 24 сигналов нет), и схемы 18 и 20 пропускают частоты, пропорциональные Vij , соответстп венно на сугдалирукщие входы реверсивных счетчиков 16 и 17. В реверсивных счетчиках 16 и 17 ПРОИСХОДИТ запись И.хрз.ненйе .текущих координат яхты D S V|j . t и К У,, t , где t - время. Вычисление скорости сближения со знаком осуществляется микропроцессором по формуле Vo V-COSlorc9 n I .:. I : I€ч7ч1МЛоОО Генератор 12 тактовых импульсов опре деляет цикл вычисления скорости сближения яхты со энаксм V , и по eiro сигналам происходит подключение в соотв1втствую«ей последовательности аргументов X, у, Хо УО (т.е. сигнальных кодов, соответствующих этим аргументам) через коммутатор 11 к микропроцессору 14 и последовательное вклкмениб команд V Запись, Сложение, «вычитание, Умножение , Деление Возведение в степень , oifcs n огласно алгоритму формулы (1)коммутатором 13 в микропроцессоре 14. После окончания каждого .цикла вычисл.ения результат соответствующий скорости сближения яхты со знаком VR , появляется на блоке 15 цифровой индикации. Таким образом, яхтсмен постоянно контролирует по лагу 1 скорость яхты относительно воды и по блоку 15 цифровой индикации скорость сближения со знаком. Постоянный контроль этих скоростей помогает распознавать периодические перемены разной длительности направления ветра, которые могут колебаться в широких пределах, делать выходы о характере течений, определять степень.своего сближения со знаком дистанции и в соответствии с этим принимать решения о необходимости совершать повороты., .Устройство позволит оперативно производить настройку яхты на воде, которая заключается в достижении мэ.ксимально возможной, проекции вектора скорости ях.ты на линию ветра (важнейший лавировочный параметр яхты). . По сравнению с базовым объектом предлагаемое устройство обладает следующими преимуществами является полностью автономным, так как не содержит передатчики, которые надо устанавливать на знаках гоночной дистанции, позволяет быстро и просто задать курс ирасстояние до любой требуемой точки акватории, по отношению к которой необходимо определить скорость сближения, причем в процессе тренировки местоположение Этой точки можно менять большое число раз с минимальными.временными затратами. Ультразвуковой лаг не имеет непосредственного контакта с водой, что также весьма существенно для гоночных яхт. При этом значительно повышаются эффективность подготов-, ки и тренировки гонщиков на воде.
У
Фмг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Мархай Ч | |||
| Техника лавировки.Катера и яхты, Судостроение, № 16, с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для тренировки яхтсменов | 1980 |
|
SU960906A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
