Предлагаемое изобретение относится к области приборостроения и может быть использовано при создании гирокомпасов для подвижных объектов.
Основным недостатком гирокомпасов, несмотря на совершенствование схем чувствительных элементов, продолжает оставаться возникающая при маневрировании объекта инерционная погрешность.
Для дальнейшего повышения точности гирокомпасов во время маневра объекта получили развитие методы и способы пред- вычисления и компенсации инерционных девиаций с применением современной вычислительной техники.
Аналогом заявляемого устройства может быть схема компенсации силы инерции, действующая на маятник индикаторного горизонта гирокомпаса при маневрировании объекта. Согласно этой схеме рекомендуется на основании внешних данных о характере маневра объекта рассчитывать текущее значение действующего на гирокомпас ускорения VN и с помощью электромагнитного датчика силы воздойствопать на рабочее тело индикатора горизонта в соответствии с формулой,
F -mVisittV
Ускорение UN(t) предлагается вычислять по формуле
VixiW V(t) cosK(t) - V(t) (o (t) sinK(t). где K(t) - курс объекта;
V(t) - скорость объекта;
v(t) - ускорение обьекта;
w (t) - угловая скорость объекта.
Основным недостатком этого способа является невысокая точность компенсации действующего на рабочее тело индикатоог горизонта линейного ускорения VN, которая обусловлена значительными погрешностями определения бортовыми техническими средствами исходной информации о линейной V и угловой «мскоростях бъекта и особенно линейного ускорения V.
Ближайшим прототипом заявляемого устройства может служить курсовая система, описанная в журнале Navigation (France). 1975. 23. № 91, с. 274-285 (франц.) В этой системе показания гирокомпаса корректируются с помощью ЭВМ, в память коСП
С
-ч
00
со
СА О
к
торой заложена адекватная математическая модель гирокомпаса. При этом в ЭВМ надлежит непрерывно вводить информацию о курсе, линейной и угловой скоростях и линейном ускорении объекта.
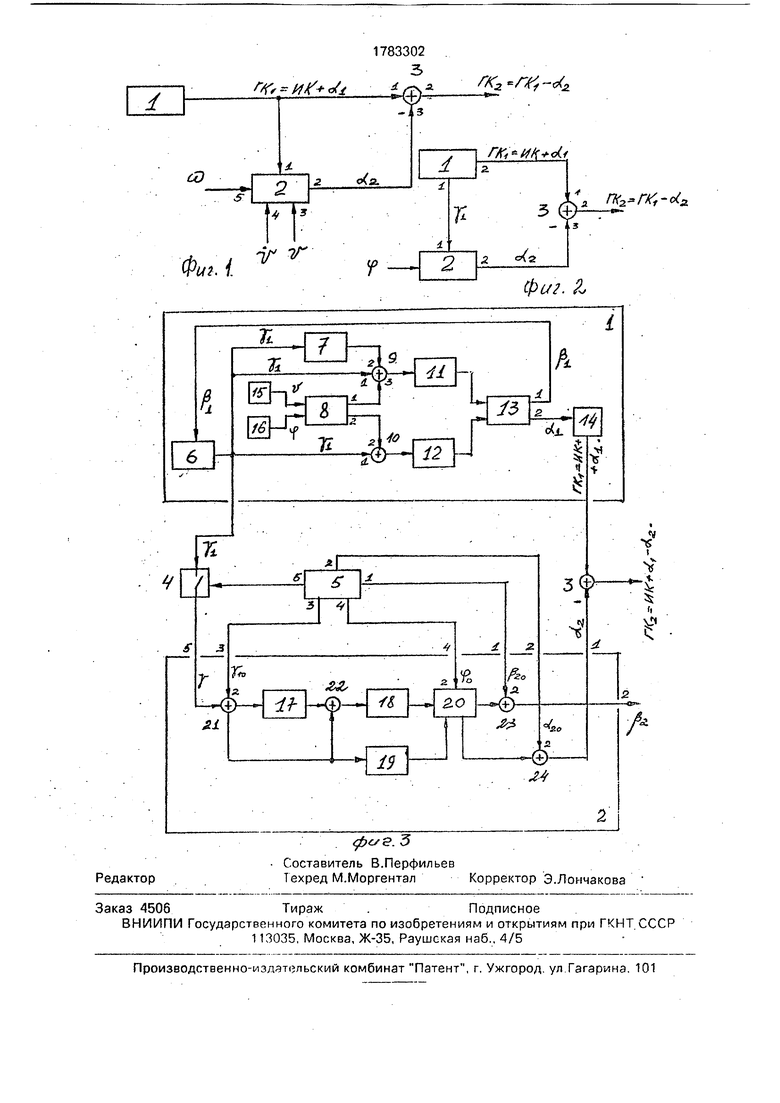
Система содержит (фиг. 1) гирокомпас 1, электронную вычислительную машину 2 и сумматор 3.
Электрический сигнал, содержащий информацию о курсе ГКт, который во время маневра объекта и после его завершения обременен инерционной погрешностью 21, снимается через выход 1 гирокомпаса и подается на входы 1 ЭВМ и сумматора. На входы 3, 4, 5 ЭВМ от бортовых технических средств поступают электрические сигналы, пропорциональные V, V, со. С выхода 2 ЭВМ информация о поправке CQ, предназначенной для компенсации инерционной погрешности гирокомпаса, подается на вход 3 сумматора. С выхода 2 этого сумматора будет сниматься откорректированное значение курса ГК2, равное ГКа 1/1К+ а.- аз. .
Точность коррекции курса объекта характеризуется величиной Е -а - а.2 , которая в свою очередь определяется ошибками источников внешней информации о движении объекта и ошибками вычисления возмущения VN.
Таким образом, основным недостатком и этого способа является невысокая точность коррекции показаний гирокомпаса во время маневра и после его завершения, обусловленная ошибками определения параметров движения объекта бортовыми техническими средствами и, как следствие, неточное вычисление с помощью ЭВМ поправки «г , предназначенной для компенсации инерционной погрешности а.
Целью изобретения является повышение точности определения курса при манев- рировании объекта на основе использования внутренней информации гирокомпаса для вычисления в реальном масштабе времени с помощью ЭВМ поправки, предназначенной для компенсации инерционной погрешности, путем исключения ошибок во внешней информации, получаемой бортовыми техническими средствами о параметрах движения объекта и используемой для коррекции гирокомпаса.
Существенная отличительная особенность предлагаемого гироскопического устройства для определения курса состоит в том, что сигнал } 1 , содержащий информацию об отклонении главной пси гироскопа на угол от плос кости горизонта, а также необходимую дпя производства коррекции информацию о северной составляющей линейного ускорения VN объекта, снимают непосредственно с индикатора горизонта гирокомпаса и без какой-либо обработки подают в блок выработки поправки для компенсации инерционной девиации, который содержит математическую модель чувствительного элемента гирокомпаса.
Ранее так никто не поступал. Возможность реализовать предлагаемое устройство появилась только после создания корректируемых гирокомпасов без скоростной девиации, имеющих интегратор для автоматической компенсации любых статических погрешностей гирокомпаса по координате , в том числе обусловленных технологическим несовершенством гиро- блока.
Изобретение поясняется рисунками, где на фиг, 1 изображена блок-схема прототипа; на фиг. 2 - блок-схема предлагаемого устройства 1; на фиг. 3 принципиальная схема устройства для коррекции показаний гирокомпаса во время маневра и после его завершения.
В блок-схему предлагаемого устройства (фиг. 2) входят гирокомпас 1, блок 2 выработ- ки поправки для компенсации инерционной девиации гирокомпаса, сумматор 3.
Электрический сигнал у , содержащий
информацию о положении рабочего тела индикатора горизонта, снимается через выход
1гирокомпаса 1 и подается на вход 1 блока
2выработки поправки.
С выхода 2 гирокомпаса 1 информация
о курсе Г«1, который во время маневра объекта и некоторое время после его завершения обременен информационной девиацией о., подается на вход 1 сумматора 3. С выхода 2 бпока 2 информация о
поправке ccz ,, предназначенной для компенсации инерционной погрешности а , подается на вход 3 сумматора 3. С выхода 2 сумматора 3 снимается откорректированное значение курса ГКа объекта, равное
«1 -02 .
Функционирование курсовой системы более обстоятельно иллюстрируется принципиальной схемой, приведенной на фиг. 3 В состав схемы входят гирокомпас 1.
блок 2 выработки поправки для компенсации инерционной девиации, сумматор 3. з также ключ 4 и пульт 5 управления.
К схеме собственно гирокомпаса 1 относятся индикатор 6 горизонта, интегратор 7.
корректор 8, сумматоры 9 и 10, датчики момента 11 и 12, гироскоп 13 и датчик 14 курса Внешняя информация о скорости V судна подается в корректор 8 гирокомпаса от датчика лага 15. а внешняя информация о
широте места вводится в корректор вручную с помощью задатчика 16
В блоке 2 выработки поправки реализована математическая модель гироскопического чувствительного элемента, включающая в себя модели 17-20 интегратора 7, датчиков 11 и 12 моментов, гироскопа 13 соответственно и сумматоры 21-24.
Необходимо подчеркнуть, что иметь в блоке выработки поправки модель корректора 8, предназначенного для компенсации гироскопических моментов, нет необходимости, так как закладывать эти моменты в модель гироскопического чувствительного эле.мента с тем, чтобы затем их компенсировать, не имеет смысла.
Функционирование схемы при движении судна с постоянной скоростью происходит следующим образом
Индикатор 6 горизонта установлен на гироскопе 13 так, что его ось чувствительности параллельна главной оси гироскопа, Поэтому любое отклонение гироск.опа 13 на угол от плоскости горизонта сразу же регистрируется индикатором 6. К каналу распространения информации о величине угла относятся выход 1 гироскопа 13 и вход индикатора горизонта. Индикатор б осуществляет измерение угла , и сигнал yi, являющийся при постоянной скорости судна функцией угла /3i , с выхода индикатора горизонта одновременно подается как в схему гирокомпаса, так и на информационный вход ключа 4.
В схеме гирокомпаса сигнал yi подается на входы 1 сумматоров 9 и 10 и интегратора 7, с выхода которого сигнал,
t пропорциональный /yi dt, подается на
о
вход 2 сумматора 9 На вход 3 сумматора 9 с выхода 1 корректора 8 подается сигнал, пропорциональный ш$ sin р . С выхода сумматора 9 сумма упомянутых сигналов подается на вход датчика 11 моментов, который будет накладывать на гироскоп 13 момент , являющийся функцией величин
t yi /yi dt и Wfc sin p Благодаря действию
о
этого момента, главная ось гироскопа по окончании переходного процесса располагается в плоскости истинного горизонта. Поэтому при стационарном движении судна установившиеся значения координат и yi будут равны О
На вход 2 сумматора 10 с выхода 2 корректора 8 подается сигнал пропорциональный скорости Vn судна вдоль меридиана. С выхода сумматора 10 на датчика 12
моментов сумма двух сигналов, один из которых пропорционален yi , а другой - VN.
Датчик 12 моментов будет налагать на гироскоп 13 момент Lz, под действием кото- 5 рого главная ось гирокомпаса по окончании переходного процесса располагается в плоскости истинного меридиана. Значение выходной координаты а гирокомпаса, снимаемой с выхода 2 гироскопа 13 и пода0 ваемой на вход датчика 14 курса, будет равно нулю. Поэтому с выхода датчика 14 курса при будет сниматься истинный курс И К объекта
После прихода гирокомпаса в меридиан
5 с пульта 5 управления через его выходы 1-4 и одноименные входы блока 2 на входы 2 сумматоров 23, 24 и 21 соответственно подаются значения начальных координат (h /fco 0; «2 020 0, yi ую 0, а
0 на вход 2 блока 20 формирования модели гироскопа подается начальная широта р0 . Одновременно командный сигнал с пульта 5управления через его выход 5 подается на управляющий вход ключа 4, и выход индика5 тора 6 горизонта будет подключен ключом 4 к входу 5 блока 2 выработки поправки Но так как координата i при нахождении гирокомпаса в положении равновесия равную нулю, то и выходная координата cti блока
® выработки поправки также будет равна нулю
В случае движение объекта с ускорением VN индикатор 6 горизонта будет отклонен от нулевого положения и сигнал yi на выходе индикатора 6 будет являться функцией не только угла , но и ускорения VN Этот сигнал, воздействуя через датчики 11 и 12 моментов на гироскоп 13, приводит к появлению в показаниях гирокомпаса инерционной погрешности а, и с выхода датчика курса на сумматор 3 будет сниматься курс а .
Функционирование математической
с модели чувствительного элемента гирокомпаса блока выработки поправки определя ется аналогичным соязями и поэтому с выхода 1 блока 2 на втсрой вход сумматора 3 будет подаваться поправка «2 . предназ0 наченная для компенсации инерционной погрешности. Поправка аг складывается в сумматоре 3 с курсом ГКч и корректирует его. На выходе сумматора 3 будет иметь место откорректированный курс
5ГКа «1 -а.2
Для теоретического обоснования пред латаемого автономного способа коррекции показаний гирокомпаса при маневрирОЕа нии объекта и оценки точности определения курса судна произведем анализ системы
0
дифференциальных уравнений, описывающих функционирование курсовой системы, показанной на фиг 3.
В первом приближении искомая система уравнений может быть представлена в следующем виде:
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Чувствительный элемент поплавкового гирокомпаса | 1990 |
|
SU1810762A1 |
| Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления | 2015 |
|
RU2607305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2234678C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| ГИРОКОМПАС | 2013 |
|
RU2544295C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
Изобретение относится к области при; боростроения и может быть использовано при создании гирокомпасов для подвижных объектов. Целью изобретения является повышение точности выработки поправки для компенсации инерционной девиации гирокомпаса при маневрировании обьекта. Поставленная цель достигается тем, что с индикатора горизонта снимают сигнал, содержащий информацию об отклонении главной оси гироскопа от плоскости1 горизонта и о северной составляющей линейного ускорения обьекта, и подают его в блок выработки поправки, в состав которого входит математическая модель чувствительного элемента гирокомпаса. 3 ил.
Hiai +Ayiyi -Hiotfslnp+ZT +Ki J yi dt 4-H2ft#sinp 0
n
о
Гирокомпас
Мат. модель гирокомпаса в ЭВМ
- Hi СЕЙ COS 900:1 + Aziyi - Hi tWiyi+yi /3l+- L
У H2 CCl + Ay2 У1 + K2 /yi/dt 0
т--О
H2 $2 - H2 ЫЈ COS «2 4- A z2 У1 О
VN Ж
+
tXi- 02 ГК2 ,
(1)
Сумматор
курс.
системы
где а ,, yi - координаты, характеризую- VN-меридиональная составляющая лищие положение главной оси гирос.опиче- 20 нейного ускорения объекта во время манев- ского чувствительного элемента и-маятника
индикатора горизонта гирокомпаса соответственно,1
xi ,р2 - расчетные значения координат положения чувствительного элемента 25 гирокомпаса, снимаемые с выхода ЭВМ;
Hi, Ayi, AZ1 - Кинетический момент и модули управляющих моментов гирокомпаса;
Н2; АУ2; Az2 - значения кинетического момента и модулей управляки (их моментов, введенные в миниЭВМ и корректор гирокомпаса;
Ki - передаточное число интегратора;
К2 - значение передаточного числа интегратора, введенного в ЭВМ;
U - момент технологического происхождения;
t-текущее время;
гиг1 - постоянная времени индикатора горизонта;40
w& , р, д - угловая скорость вращения Земли, широта места, ускорение силы тяжести;
И К - истинный курс объекта;
30
35
ра.
Наличие в уравнениях движения гирокомпаса момента Ki /yi dt интегратора укао
зывает на необходимость последовательного анализа этих уравнений сначала в интервале времени переходного процесса после пуска гирокомпаса:
, где т.™ - окончание переходного процесса;
tno - начало переходного процесса; а затем и в интервале времени маневра:
tM ti - to, где to - момент начала маневра;
ц - момент окончания маневра; и, наконец, в интервале времени переходного процесса, в течение которого имеют место инерционные погрешности, вызванные маневром.
-иишнмыикурсроъекта;отыскания частных решений системы ;(1)
ГКт - гирокомпа ;ныи курс (без коррекции): вначале необходимо первое уравнение этой ГК2 -. гирокомпасный курс (после кор- системы продифференцировать по времерекции); ни- Поэтому система (1) примет следующий
вид:
HiftЈ :ospai + Aziy (Hi
HI«I +Ayiy-i Kiy 0
Гиг1У+ У1 -p
H2 аг + АУ2 yi 4- «2 /yi dt 0
о H2 fh -Ho ft# COS p Ol + A z2 У1 0
ГК -(/2
i J yi dt 4-H2ft#si
n
о
VN Ж
+
(1)
нейного ускорения объекта во время манев-
ра.
Наличие в уравнениях движения гирокомпаса момента Ki /yi dt интегратора укао
зывает на необходимость последовательного анализа этих уравнений сначала в интервале времени переходного процесса после пуска гирокомпаса:
, где т.™ - окончание переходного процесса;
tno - начало переходного процесса; а затем и в интервале времени маневра:
tM ti - to, где to - момент начала маневра;
ц - момент окончания маневра; и, наконец, в интервале времени переходного процесса, в течение которого имеют место инерционные погрешности, вызванные маневром.
отыскания частных решений системы ;(1)
вначале необходимо первое уравнение этой системы продифференцировать по време(2)
Полагая, что а 0; /5i 0; yi 0, находим частные решения по координатам /3i , yi . он:
„, Hi-H2VNn}
a 1ч R7 Ro-fttfcosyV(3)
Решения (З) показывают, что сигнал yi4 на выходе индикатора горизонта после окончания переходного процесса при стационарном движении судна равен нулю как при , так и при имеющемся вредном моменте U const, который действует на гирокомпас. Это качество прибора, достигнутое благодаря применению интегратора, и позволяет эффективно использовать ЭВМ для компенсации инерционных девиаций гирокомпаса.
С учетом сказанного первое уравнение системы (1) к моменту прихода гирокомпаса в меридиан можно переписато так:
Hi ai+Ayiyi
1пк
(Hi-H2) sin ip -Lr-Ki / yi dt (4)
t no
11
11
Hidi + Ayi yi+Ki/dt 0
to
Hi/3i -HiftЈcospai + Aziyi
V/..
VN gti
TnrlVl +У1 +
П H2 аг + Ay2 yi + K2 / yi dt 0
to
H2 fa - H2 (a$ cos p ai + A z2 yi
ГК1 - 02 ГК2
Из системы уравнений (7) видно, что движение реального гироскопического чувствительного элемента гирокомпаса и его динамической модели вполне определяется при заданных начальных условиях.
Принимая как момент начала ма- невра и обоснованно считая, что начальные координаты гирокомпаса аю , /Зю . УЮ в этот момент времени имеют значения, определяемые формулами (3), начальные условия для динамической модели гироскопическо- го чувствительного элемента задаются нулевыми:
У1 ую 0 . Д -/fee 0 , «2 «2о О и вводятся в ЭВМ.55
При выполнении требований
Hi H2;Ayi Ay2 Ki K2, (8)
Но тогда как координата , то это означает, что на выходе интегратора к моменту времени т.пк формируется постоянный сигнал:
tnic
/yidt -bi-Hi -Н2
v v.auslrxp,
tnoMM
а первое уравнение системы.(1), описывающее движение гирокомпаса после завершения переходного процесса, может быть представлено так:
11 Hi а + АУ1 yi+ Ki J yi dt 0.(6)
to
где за t0 может быть принят любой момент времени после завершения переходного процесса гирокомпаса.
IT)
когда значения всех параметров гироскопического чувствительного элемента введены в динамическую модель ЭВМ и в корректор без ошибок, координаты ои (t),(t) на выходе гироскопического чувствительного элемента будут соответственно равны значениям поправок «г (t) и fk (t) на выходе микропроцессора как во время маневра, так и после его завершения, Это означает, что на выходе курсовой системы будет иметь место полная компенсация инерционной погрешности.
При нарушении условий (8) (из-за неточного знания параметров гирокомпаса) на выходе системы будет иметь место остаточная нескомпенсированная погрешность ( ai - «г ). но ее величина будет по крайней мере на порядок меньше инерционной девиации прототипа.
Решение системы дифференциальных уравнений (7) было произведено на ЭВМ Искра-226. Как показали расчеты при соблюдении требований (8), остаточная инерционная погрешность ( ел - «г) курсовой системы оказалась равной нулю и, следовательно, маневрирование объекта вдоль меридиана в принципе не сказывается на точности этой курсовой системы.
Таким образом, на основании изложенного следует, что реализация предлагаемого гироскопическог,о устройства позволяет резко повысить точность определения курса во время маневра за счет исключения его показаний инерционной девиации.
Основные достоинства заявляемого устройства состоят в следующем:
Формула изобретения Гироскопическое устройство для определения курса, содержащее блок выработки поправки для компенсации инерционной девиации гирокомпаса, интегратор, гироскоп с датчиками момента по двум каналам, датчиком курса и индикатором горизонта, первый сумматор, причем выход датчика
курса и выход блока выработки поправки соединены соответственно с первым и вторым входами первого сумматора, выход которого является выходом устройства, а
также последовательно соединенные задат- чик широты, корректор гироскопа и второй сумматор, второй вход которого соединен непосредственно с выходом индикатора горизонта, а третий вход соединен с индика0 тором горизонта через интегратор, третий сумматор, первый и второй-входы которого соединены соответственно с вторым выходом корректора и вторым входом второго сумматора, а также лаг, выход которого со5 единен с вторым входом корректора, выходы второго и третьего сумматора соединены соответственно с входами датчиков момента гироскопа, отличающееся тем, что, с целью повышения точности выработки по0 правки для компенсации инерционной девиации гирокомпаса при маневрировании объекта, в него введены пульт управления, выходы которого с первого по четвертый соединены соответственно с входами с пер5 вого по четвертый блока выработки поправки, и управляемый ключ, управляющий вход которого соединен с пятым выходом пульта управления, выход индикатора горизонта соединен с сигнальным входом ключа, вы0 ход которого соединен с пятым входом бло ка выработки поправки, причем блок выработки поправки выполнен в виде последовательно соединенных четвертого сумматора, модели интегратора, пятого сум5 матора, первого блока формирования модели датчика момента, блока формирования модели гироскопа и шестого сумматора, второй вход которого соединен с первым входом блока выработки поправки, а его
0 выход является вторым выходом устройства, второй вход блока формирования модели гироскопа соединен с четвертым входом блока выработки поправки, первый и второй входы четвертого сумматора соединены со5 ответственно с третьим и пятым входами блока выработки поправки, а также второго блока формирования модели датчика момента, выход которого соединен с третьим входом блока формирования модели гиро0 скопа, и седьмого сумматора, первый и второй входы которого соединены соответственно с вторым выходом блока формирования модели гироскопа и вторым входом блока выработки поправки, выход
5 седьмого сумматора соединен С первым выходом блока выработки поправки, выход четвертого сумматора соединен также с вторым входом пятого сумматора и входом второго блока формирования модели датчика момента.
фиг. &
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Новые технические средства судовождения | |||
| М.: Транспорт, 1973, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Navigation | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Р | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU274A1 |
