1-И
8
Изобретение относится к судовождению, в частности к задатчикам угла перекладки руля.
Известен задатчик угла перекладки руля, содержащий датчик угла перекладки руля, задатчик и датчик курса, подключенные к первому входу операционного усилителя, к выходу которого подключен индикатор угла перекладки руля 1J.
Недостаток этого устройства низкая точность управления курсом судна по индикатору советчика судоводителю.
Цель изобретения - повышение точности ручного управления курсом судна.
Поставленная цель достигается тем, что задатчик угла перекладки руля, содержащий датчик угла перекладки руля, .задатчик и датчик курса, подключенные к первому входу операционного усилителя, к выходу которого подключен индикатор угла перекладки руля, снабжен последовательно соединенными задатчиком периода колебаний и блоком умножения, подключенным к второму входу операционного усилителя, а также подключенным к выходу операционного усилителя блоком задания амплитуды отклонения руля, выход которого связан с третьим входом операционного усилителя, при этом выход датчика угла перекладки руля соединен с входом блока умножения.
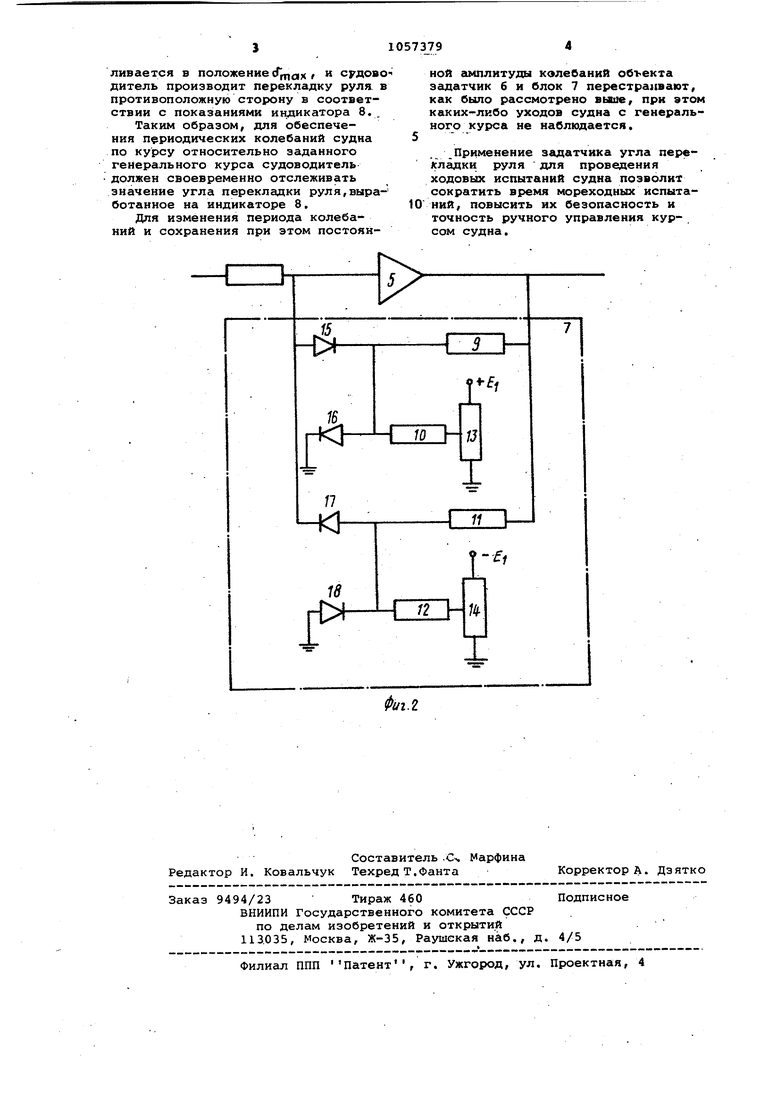
На фиг. 1 показана функи;иог налвная схема задатчика переклад- , ки руля; на фиг. 2 - схема возмож-, ной реализации блока задания амплитуды отклонения руля.
Задатчик угла перекладки руля содержит задатчик 1 курса, датчик 2 курса, датчик 3 угла перекладки руля, блок 4 умножения, операционный усилитель 5, задатчик 6 периода колебаний, блок 7 задания амплитуды отклонения руля, индикатор 8 угла перекладки руля.
Блок 7 задания амплитуды отклонений руля содержит резисторы 9-12, потенциометры 13-14, диоды 15-18,
Задатчик угла перекладки руля работает следующим образом.
При необходимости создания периодических колебаний судна в процессе ходовых испытаний судоводитель, устанавливает в блоке 7 задания амплитуды отклонений руля желаемую амплитуду колебаний, частота U) колебаний определяется крутизной сигнал угла перекладки руля ( по сравнению с крутизной сигнала рассогласования по курсу (й) и значением угла перекладки руля ( из следующей зависимости:
(uj)cr 5i n{44- Xu)cf), (1)
где f(it)) - функция частоты колебаний;
К со - крутизна сигнала устанавливаемая в задатчике 6 периода колебаний;
тах масимальный угол перекладки руля.
Для рассматриваемого класса судов эта зависимость близка к линейному виду
(2) где К - коэффициент пропорциональности.
Для большинства судов и кораблей задатчик б периода колебаний может быть выполнен в виде потенциометра линейного преобразователя угла поворота рукоятки (соответствующего желаемой частоте колебаний) в напряжение постоянного тока.
:Для поддержания постоянной амплитуды колебаний судоводитель устанавливает в блоке 7 задания амплитуды отклонений руля ограничение перекладки руля по заранее полученной для рассматриваемого класса судо нелинейной зависимости, близкой к квадратичной
(2)
Эта зависимость реализуется в блоке 7 в виде ключевой электронной схемы, которая открывается при достижении на выходе операционного усилителя напряжения, пропорционального Установка ограничения в блоке
7осугпествляется в соответствии с зависимостью (3) с помощью потенциометров 13 и 14.
После установки частоты и амплитуды угла перекладки руля судоводитель перекладывает руль на угол, рав ныйсГр оХ S результате чего появляется рассогласование по курсу.
8момент, когда разность вида
(ЛЧ-К.СГ)
(4)
изменит знак, на выходе операционного усилителя 5 также изменится полярность напряжения, так как оба сигнала зависимости (1) поступают на вход операционного усилителя 5 от задатчика 1 и датчика 2 курса блока 4. На выходе операционного усилителя 5 вырабатывается напряжение в соответствии с зависимостью (i), которое поступает на индикатор 8 угла перекладки руля, при этом судоводитель должен переложить руль в соответствии с показанием индикаtopa 8 и оставить его в этом положении до того момента, .пока судно не начнет отклоняться от генерального в противоположную сторону В момент изменения знака зависимоети (1) стрелка индикатора 8 устанавливается в положениесГ дх i срдово- дитель производит перекладку руля в противоположную сторону в соответствии с показаниями индикатора 8..
Таким образом, для обеспечения периодических колебаний судна по курсу относительно заданного генерального курса судоводитель должен своевременно отслеживать значение угла перекладки руля,выработанное на индикаторе 8.
Для изменения периода колебаний и сохранения при этом постоянной амплитуды колебаний объекта эсщатчик б и блок 7 перестраивают, как было рассмотрено выше, при этом каких-либо уходов судна с генерального курса не наблюдается.
.Применение задатчика угла перехладки руля для проведения ходовых испытаний судна позволит сократить время мореходных испытаНИИ, повысить их безопасность и точность ручного управления курсом судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
ЗАДАТЧИК УГЛА ПЕРЕКЛАДКИ РУЛЯ, сбдержащий датчик угла перекладки руля, задатчик и датчик курса, подключенные к первому входу операционного усилителя, к выходу которого подключен.индикатор угла перекладки руля, .о т л и чаю щ и и с я тем,- ЧТО, с целью повышения точности ручного управления курсом судна, он снабжен последовательно соединенным звдатчиком периода колебаний и блоком умножения, подключенным к второму входу операционного усилителя, а также подключенньм к выходу операционного усилителя блоком задания амплитуды-отклонения .руля, выход которого связан с третьим входом бпераЦионного усилителя, при этом .выход датчика угла переклгщки руля соединен с входом блока умножения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Задатчик курса судна с прогнозированием | 1976 |
|
SU610721A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| . | |||
