Изобретение относится к области судовождения, в частности к системам автоматического управления движением морских судов.
Известно устройство (А.С.СССР N 460535), обеспечивающее автоматическое удержание судна на заданном курсе. Стабилизация курса осуществляется по данным гирокомпаса, который является основным источником информации о направлении движения судна. Сигнал текущего курса и его производная поступают на вход суммирующего усилителя, где формируется пропорционально-дифференциальный (ПД) закон управления рулевым приводом.
Рассматриваемый авторулевой обладает следующими недостатками:
- перегружает рулевой привод при появлении на море волнения,
- отсутствует подсистема контроля и диагностики исправности узлов аппаратуры управления движением, что недопустимо при эксплуатации столь ответственной корабельной системы.
Известно также устройство управления движением судна (А. С. СССР N 979204, кл. B 63 H 25/04), принятое нами в качестве прототипа, содержащее датчик и задатчик направления движения, датчик угла перекладки руля, блок выработки скорости - датчик угловой скорости судна, выходы которых подключены через суммирующий усилитель к рулевому приводу, и сумматор. Недостатки рассмотренного выше аналога присущи также и прототипу.
Задача, решаемая настоящим изобретением, состоит в создании надежной аппаратуры для автоматического управления движением судна по информации от приемника спутниковой навигационной системы (СНС), т.е. в устранении отмеченных выше двух недостатков прототипа.
Поставленная задача достигается тем, что в заявляемую аппаратуру автоматического управления движением судна, содержащую задатчик направления движения, датчик угла перекладки руля, суммирующий усилитель, блок выработки угловой скорости и сумматор, дополнительно введены: интегратор, два сумматора, два стабилитрона, три индикатора, два усилителя и конденсатор, соединенные между собой в соответствии с чертежом.
Существенной новизной заявляемого изобретения является введение диагностирования и индикации о неисправности при эксплуатации:
- сигнала недопустимого рассогласования между заданным направлением движения судна и истинным,
- сигнала сбоя при выработке угловой скорости судна,
- сигнала о сбое в исполнительном механизме или рулевом приводе.
Следует также отметить, что для повышения надежности работы рулевого привода введено ограничение величины сигнала рассогласования по направлению движения. Это позволило исключить из закона управления случайные, но большие выбросы (при переходе на новую систему спутников или при др. помехах), приводящие к перегрузкам рулевого привода и, как следствие, к возможности его заклинивания.
Функциональная схема заявляемого устройства приведена на чертеже.
Аппаратура автоматического управления движением судна состоит из задатчика направления движения 1, датчика 2 угла перекладки руля, суммирующего усилителя 3, рулевого привода 4, блока выработки угловой скорости 5, приемника СНС 6, первого сумматора 7, двух усилителей 8, 9, интегратора 10, второго и третьего сумматоров 11, 12, конденсатора 13, трех индикаторов 14-16 и стабилитронов 17. Судно - объект управления 18.
В качестве задатчика направления движения 1, датчика 2 угла перекладки руля может быть использован любой аналоговый (цифровой) преобразователь угла поворота в электрический сигнал с точностью не хуже 1 процента. В аналоговом варианте реализации аппаратуры в качестве суммирующего усилителя 3 можно использовать интегральную микросхему типа 140-УД-6. Блок выработки скорости 5 реализуется в виде датчика угловой скорости чувствительностью не хуже 0.05 гр. /с, приемник СНС 6 типа "Волонтер", сумматоры 7, 11, 12 реализуются на микросхемах типа 140-УД-6, усилители 8, 9 реализуются на микросхемах типа 140-УД-6, интегратор 10 - на микросхемах типа 140-УД-8, индикаторы 14-16 - световой либо звуковой указатель судоводителю о сбое в работе.
Возможен также вариант реализации предложенной аппаратуры на элементах цифровой техники.
Аппаратура работает следующим образом. Требуемое направление движения судна задается задатчиком 1. Если это направление не совпадает с текущим направлением движения судна, то на выходе суммирующего усилителя 3 появится сигнал, приводящий к отклонению пера руля судна рулевым приводом 4, при этом начнется поворот судна к заданному направлению движения. При достижении судном заданного направления движения перо руля вернется в нулевое положение.
Рассмотрим, как формируется закон управления рулевым приводом и выдача информации о появлении сбоя в аппаратуре управления движением.
Сигнал, пропорциональный текущему направлению движения судна, вырабатывается приемником СНС 6 и поступает на первый сумматор 7, где алгебраически суммируется с сигналом заданного направления движения, т.е. формируется сигнал отклонения судна от заданного направления движения:
ΔПУ = ПУ-ПУзад (1)
Этот сигнал проходит через первый усилитель 8 на третий вход суммирующего усилителя 3. При прохождении через усилитель 8 сигнал ΔПУ по амплитуде ограничивается из-за подключенных к входу и выходу усилителя 8 двух стабилитронов 17. Это ограничение позволяет срезать выбросы шумов измерения:
где С - const,
ΔПУ = ПУ-ПУзад,
При этом будет снижена и загрузка рулевого привода, а следовательно, и вероятность его "заклинки " во время плавания.
Индикатор 14 при этом будет выдавать информацию о появлении сбоя, если:
Δ ПУ > С (3)
Блок скорости 5 вырабатывает сигнал угловой скорости судна ω, который поступает на второй вход суммирующего усилителя 3, одновременно сигнал угловой скорости поступает на второй сумматор 11, на второй вход которого поступает сигнал угловой скорости судна с выхода второго усилителя 9, на вход которого поступает сигнал  через конденсатор 13. На выходе сумматора 11 формируется невязка:
через конденсатор 13. На выходе сумматора 11 формируется невязка:
и, если величина этой невязки превышает допустимую величину, то второй индикатор 15 выдаст об этом информацию судоводителю.
На первый вход суммирующего усилителя 3 с датчика угла перекладки руля 2 поступает сигнал, пропорциональный углу перекладки руля, одновременно этот же сигнал поступает на вход третьего сумматора 12, на второй вход третьего сумматора поступает восстановленный (модельный) сигнал величины угла перекладки руля. Восстановление величины угла перекладки руля осуществляется на интеграторе 10. На вход интегратора поступает сигнал заданной скорости перекладки руля с выхода суммирующего усилителя 3. На выходе интегратора должен выработаться сигнал угла перекладки руля. Однако в процессе длительного времени руль будет "дрейфовать". Для компенсации инфранизкочастотных помех (устранения дрейфа) на второй вход интегратора поступает слабый сигнал невязки с выхода сумматора 12:
Δδ = δ-δвосстан (5)
В результате на выходе интегратора получим:
где k - "малый" коэффициент передачи.
При сбое в работе рулевого привода (потере питания, заклинке и т.д.) невязка превысит допустимое значение, что приведет к срабатыванию третьего индикатора.
Информация о сбоях индикаторов может также поступать в диагностический центр.
На четвертый вход суммирующего усилителя 3 поступает сигнал бокового отклонения судна y. В результате на выходе суммирующего усилителя 3 вырабатывается сигнал заданной скорости перекладки руля, который поступает на регулятор рулевого привода и интегратор 10 (заданное значение скорости перекладки руля):
где  скорость перекладки руля,
скорость перекладки руля, - рассогласование по углу направления движения (ограниченное по амплитуде),
- рассогласование по углу направления движения (ограниченное по амплитуде),
ω - - угловая скорость судна,
y - боковое смещение судна относительно траектории движения,
δ - угол перекладки руля,
k1,2,3. - коэффициенты регулирования.
Было проведено моделирование работы предложенной аппаратуры. Полученные результаты подтвердили работоспособность и высокую эффективность аппаратуры даже при наличии сильных шумов и внешних возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
Изобретение относится к судовождению, в частности к системам автоматического управления движением морских судов с использованием приемника спутниковой навигационной системы, датчика угловой скорости, вычислителя. В аппаратуру введено три индикатора, информирующие судоводителя о появлении сбоев в узлах выработки приращения путевого угла и угловой скорости судна, а также в рулевом приводе. Для формирования сигнала первого индикатора введены первый сумматор, первый усилитель и два стабилитрона. Включение последних одновременно позволяет снизить загрузку рулевого привода при сильном волнении на море. На второй индикатор сигнал поступает со второго сумматора через конденсатор и второй усилитель, на третий индикатор - через третий сумматор и интегратор. Достигается повышение безотказности аппаратуры управления и снижение загрузки рулевого привода. 1 ил.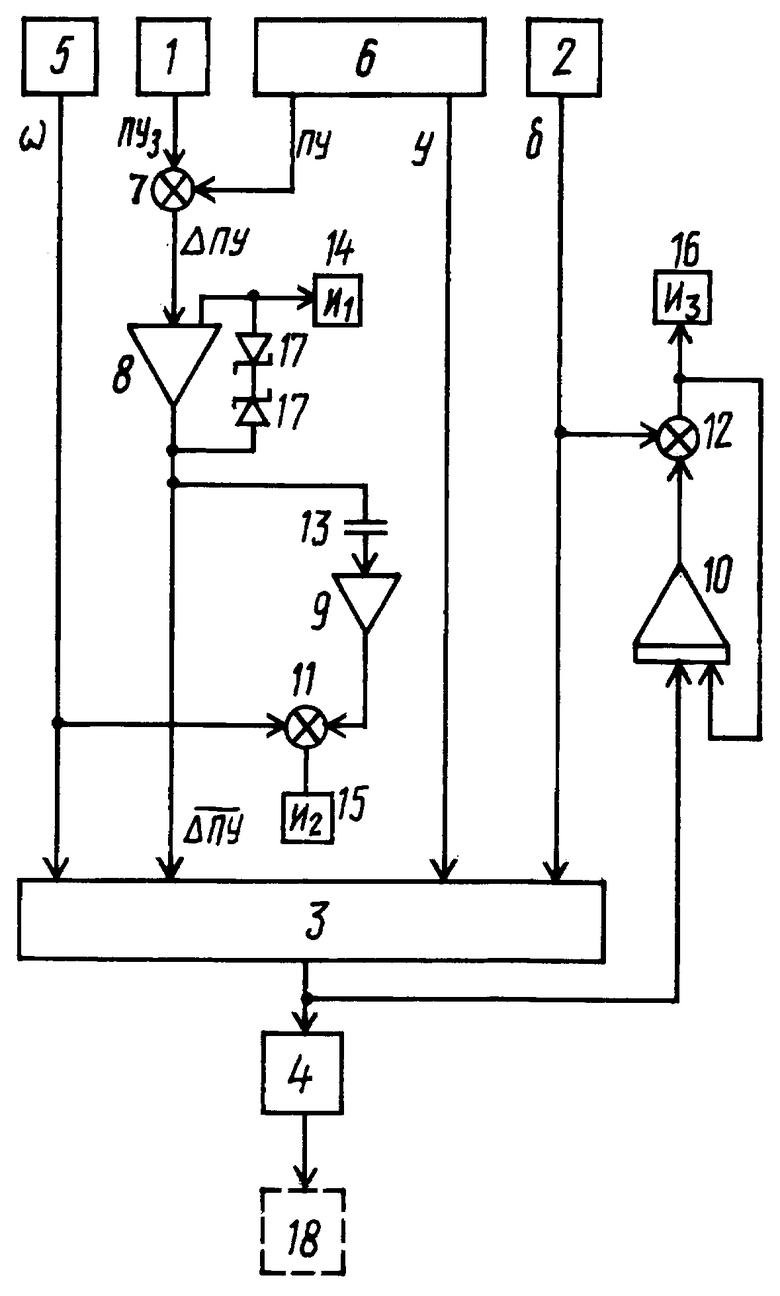
Аппаратура автоматического управления движением судна, содержащая задатчик направления движения, датчик угла перекладки руля, выход которого подключен к первому входу суммирующего усилителя, выход которого подключен к рулевому приводу, блок выработки угловой скорости, подключенный к второму входу суммирующего усилителя, приемник спутниковой навигационной системы, первый выход которого соединен через первый сумматор и первый усилитель с третьим входом суммирующего усилителя, второй вход первого сумматора подключен к выходу задатчика направления движения, второй выход приемника спутниковой навигационной системы соединен с четвертым входом суммирующего усилителя, отличающаяся тем, что содержит второй усилитель, интегратор, второй и третий сумматоры, конденсатор, три индикатора и два стабилитрона, последовательно-встречно соединенные и подключенные анодами соответственно к выходу и второму входу первого усилителя, к второму входу которого подключен также первый индикатор, вход второго усилителя соединен через конденсатор с третьим входом суммирующего усилителя, выход второго усилителя через второй сумматор соединен с вторым индикатором, второй вход второго сумматора соединен со вторым входом суммирующего усилителя, выход которого через интегратор и третий сумматор соединен с третьим индикатором, второй вход интегратора соединен с выходом третьего сумматора, второй вход которого соединен с первым входом суммирующего усилителя.
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
| US 3927635 A, 23.12.1975 | |||
| Устройство для подвода жидких компонентов в ферментатор | 1982 |
|
SU1068474A1 |
