СП
со
Oti 4i
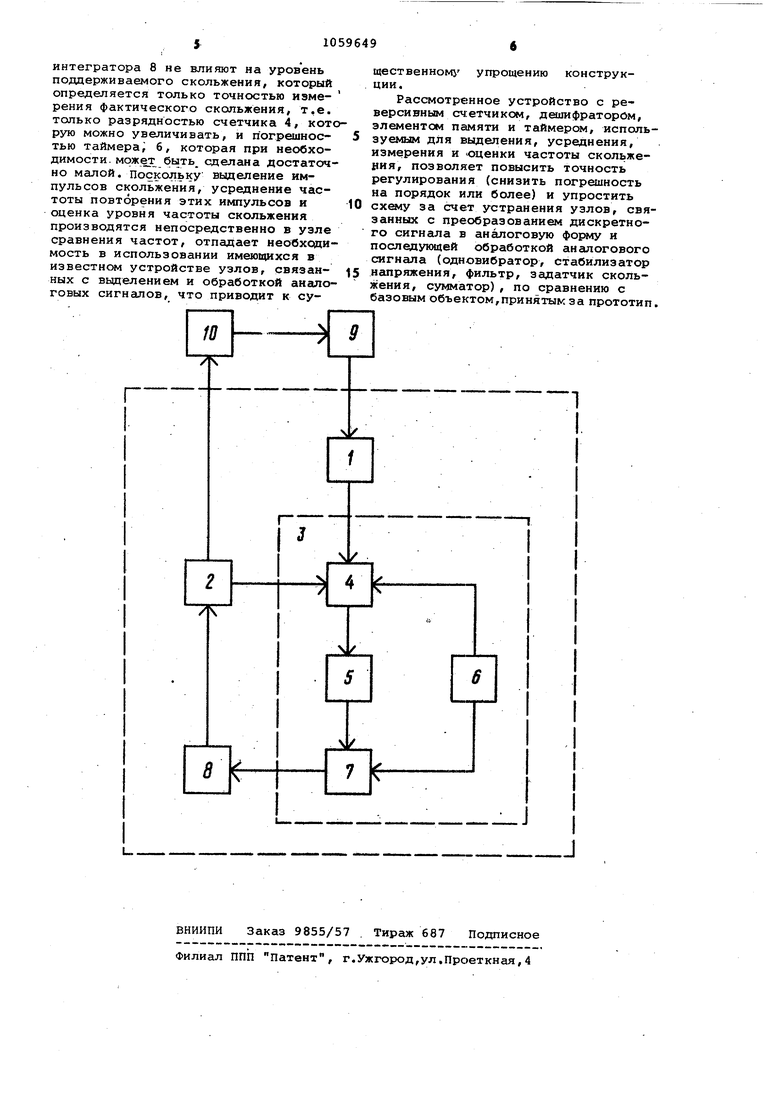
Изобретение относится к электротехнике и предназначено для использо вания в схемах частотно-управляемого асинхронного электропривода, преимущественно в тех случаях, когда тре- буется точное поддержание неизменного абсолютного скольжения при изменяющейся в широких пределах частот враг.ения двигателя привода. Известно устройство для регулиров ния абсолютного скольжения, используемое в схемах частотно-управляемог асинхронного электропривода, в котором сигнал дискретного датчика часто ты вращения преобразуется в аналоговую форму, суммируется с постоянным аналоговым сигналом, пропорциональны заданной частоте абсолютного склоьже ния, а полученный суммарный сигнал ВНОВЬ преобразуется в задающем генераторе в частоту периодических импульсов, которые поступают в статический преобразователь, питающий пер менным токсм двигатель привода, и определяют тем самым ч.астоту питания двигателя ij . Недостаток устройства состоит В том, что оно не может быть применено р электроприводах с относительно малым скольжением, где требуется высок точность подц,ер.жаНия последнего. Это объясняется тем, что в таких устройствах осуществляется двойное преобразование частоты: сначала из дискретной формы в аналоговую, а затем (после суммирования) сигнал вновь преобразуется в дискретную форму. Этим преобразованиям неизбежно сопут ствуют погрешности (главным образом из-за временной нестабильности входя щих в преобразователи конденсаторов) Погрешность абслютного скольжения : получаемого как разность двух близки по значению неточных величин (частота питания и частота вращения), может достигать сотен и более процентов . Наиболее близким по технической сущности к предлагаемснлу является лстройство для регулирования абсолют ного скольжения частотно-управляемого асинхронного электроприв.ода. Устройство содержит дискретный датчик частоты враицения, задающий генератор, узел сравнения частот (дис. ткретный вычитатель частоты), лнтегратор сигналов отклонения «скольже-ния, а также цепь измерения отклонения скольжения, состоящую из одновибратора, стабилизатора напряжения, фильтра, задатчика сйольжения и узла сравнения аналоговых сигналов (сумматора). Выходной сигнал устройства в виде импульсов частоты питания поступает на статический преобразовате1, питающий переменным токе асинхронный, двигатель, а частота вращения вала двигателя измеряется упомянутым датчиком. Характерной особенностью этого, устройства, позволившей с лцественно повысить точность поддержания скольжения по сравнению с другими известными устройствами, является наличие замкнутого контура регулирования скольжения (обратная связь по aбcoлютнo y ско.пьжению) и наличие астатического звена - интегратора 2 . Однако,в данной схеме сохраняется заметная погрешность поддерживаемо- го уровня абсолютного скольжения, обусловлбшная тем, что здесь в дискретной форме (т.е. с весьма небольшой погр€Я11ностью) осуществляется только выделение последовательности импульсов скольжения, тогда как усреднение частоты скольжения, и ее измерение (сравнение с заданной величиной) производятся в аналоговой форме. В результате погрешность ширины импульса одновибратора, погрешность амплитуды этого импульса за счет отклонения выходного напряжения стабилизатора, погрешность задатчика скольжения и погрешность узла сравнения частот ариф1у1етически суммируют и входят в общую погрешность, скольжения. Кроме того, необходимость преобразования дискретных импульсов скольжения в аналоговую форму и необходимость последующих операций над аналоговым сигналом приводит к усложнению устройства. Цель изобретения- - повышение точности регулирования и упрощения устройства. ,.. Поставленная цель достигается тем, что в устройстве для регулирования абсолютного скольжения частотно-управляемого асинхронного электропривода, содержащем дискретный датчик частоты вращения, задающий генератор для управления частотой питания двигателя привода, интегратор сигналов отклонения скольжения и узел сравнения частот, выход которого соединен с входом интегратора, выход которого соединен с входом задающего генератора, а выходы заг дающего генератора и датчика частоты вращения соединены с информационными входами узла сравнения частот, после,дний составлен из реверсивного счетчика, таймера, дешифратора и элемента памяти, причем информационные входы реверсивного счетчика являются входами узла сравнения частот, а выходы сметчика подключены к входг1м дешифратора, выход которого через элемент памяти соединен с входом интегратора, при выходы таймера соединены с установочным входом реверсивного счетчика и со стробирующим входом элемента памяти. ria чертеже представлена функциональная блок схема устройства для регулирования абсолютного скольжения частотно-управляемого асинхронного электропривода. Устройство для регулирования абсолютного скольжения частотно-управляемого электропривода включает датчик 1 частоты вращения и эадагаций генератор 2, выходы которых соединены с информационными, входами узла 3 сравнения частот и включакнцего реверсивный счетчик 4, выходы которого соединены с входами дешифратора 5, таймер б, выходы которого соединены с установочным входом реверсивного счетчика 4 и со стробир у1ацим входом элемента 7 памяти, информационный вход которого соединен с выходом дешифратора Ь, а выход -с входом интег ратора 8, выход которого соединен с входом задающего генератора 2. Ревер сивный счетчик может быть выполнен на основе JK-илиD-триггеров или может быть применен однокорпусный интегральный реверсивный счетчик. При необходимости на входе счетчика может быть включено одно из известных устройств, осуществляющих разделени во времени импульсов двух сравниваемых частот., В качестве.дешифратора может быть использована интегргшьная схема тип многовходного И; с входам дешифрато ра могут быть присоединены в той или иной ксадбинации (в зависимости от требуемой величины скольжения) прямы или инверсные выходы разрядов счетчика. В качетсве элемента памяти может быть использованоВ -триггер, на информационный вход которого поступае сигнгш даиифратора (в виде логическ го нуля или единицы), а на стробиру щий вход-импульс команды записи с выхода таймера. В качестве таймера может быть использовано.мультивибратор любого типа, а при необходимЬсти поддержания скольжения с очень высокой точностью - кварцевый генератор. В-качестве дискретного датчика частоты вращения может быть использовано датчик любого известного типа; электромеханический, фотомеханический, синхронный тахогенератор и др. Интегратор может быть выполнен на полупроводниковом операционнсм усилителе, включенном по схеме интегрирующего усилителя с конденсатором в цепи обратной связи, причем каждая поступающая команда Ма ло должна приводить к дозированному подзаряду конденсатора, а кгркдая команда Много - к дозирован ному его разряду. В качетсве задающего генератора может быть использован любой из известных преобразователей напряжения в частоту, причем от него требуется высокой точности, поскольку его сяиибка не входит в погрешность скольжения . Устройство работает следующим образом. Датчик J частоты вращения подает на вход вычитания счетчика 4 последовательность импульсов, частота повторения которых равна или пропорциональна частоте вращения двигателя 9, а задающий генератор 2 подает на вход сложения 4 последовательность импульсов,.частота повторения которых равна или пропорциональна частоте напряжения питания двигателя 9. В данный момент в реверсивном счетчике 4 оказывается записанным число, равное разности количества импульсов частоты питания, поступгиощих на, вход с мс 4ента начала счета, и количество поступивших за это .же время импульсов частоты вращения. Этому числу в каждый данный момент соответствует на выходе дешифратора 5 Уровень логического нуля или логической единицы. По периодически поступающей на стробирукяций вход, элемента 7. памяти команде таймера 6 сигнал, имеющийся в этот момент на выходе дешифратора 5, записывается вэлемент 7 памяти, где и остается в виде уровня логического нуля или логической единицы на период времени до поступления следунзщей команды таймера 6, по которой производится перезапись. Непосред(ственно за каждой перезаписью таймер б выдает -ксманду на установочный вход счетчика 4. По этой команде счетчик устанавливается в исходное (в частном случае - нулевое) положение. Двум возможным логическим уровням на выходе элемента 7 памяти соответствует положительное (Много) или отрицательное (Мало) отклонения фактической величины скольжения от заданного уровня. В зависимости от знака отклонения интегратор 8, соединенный с выходом элемента памят, получает дозированную, положительную или отрицательную порцию энергии, в результате, чего про- исходит соответствующее увеличение или уменьшение выходного аналогового сигнала интегратора 8, и, как следствие, изменяется уровень частоты задакжцего генератора 2 и пропорционально ему - выходная частота статаческого преобразователя 10, т.е. частота питания двигателя, что равносильно соответствующему изменению величины скольжения. При наличии замкнутого контура регулирования абсолютного скольжения и при наличии в контуре астатического звена .(интегратора 8) погрешности задающего генератора 2 и
интегратора 8 не влияют на уровень поддерживаемого скольжения, который определяется только точностью измерения фактического скольжения, т.е. только разрядностью счетчика 4, которую можно увеличивать, и погрешностью таймера 6, которая при необходимости, может быть сделана достаточно малой. Поскольку вьаделение импульсов скольжения, усреднение частоты повторения этих импульсов и оценка уровня частоты скольжения производятся непосредственно в узле сравнения частот, отпадает необходимость в использовании имеющихся в известном устройстве узлов, связанных с выделением и обработкой аналоговых сигналов, что приводит к существенном упрощению конструкции.
Рассмотренное устройство с реверсивным сч:етчиком, дешифратором, злементом памяти и таймером, используемым для выделения, усреднения, измерения и оценки частоты скольжевия, позволяет повысить точность регулирования (снизить погрешность на порядок или более) и упростить схему за счет устранения узлов, связанных с преобразованием дискретного сигнала в аналоговую форму и последующей обработкой аналогового сигнала (одновибратор, стабилизатор напряжения, фильтр, задатчик скольжения, сумматор), по сравнению с базовым объектом,принятым за прототип
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Устройство для формирования скольжения асинхронного двигателя в частотно-регулируемом электроприводе | 1980 |
|
SU866682A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085018C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления частотой асинхронных тяговых двигателей | 1984 |
|
SU1241402A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового электропривода | 1979 |
|
SU875571A1 |
УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ АБСОЛЮТНОГО СКОЛЬЖЕНИЯ ЧАСТОТНО-УПРАВЛЯЕМОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА, содержащее дискретный датчик частоты вращения, задахщий генератор для управления частотой питания двигателя привода,, интегратор сингналов отклонения скольжения и узел сравнения частот, выход которого соединен с входом интегратора, выхсад которого соединен с входом задающего генератора, а выходы задающего генератора и датчика частоты вращения со цинены с информсщионными входами узла сравнения частот, отличающеес я тем, что, с целью повьвиения точности регулирования и упрощения, узел сравнения частот содержит реверсивный счётчик, дешифратор, таймер и элемент памяти, информационные входы реверсивного счетчика явл5потся входами узла сравнения частот, а, выходы счетчика подключены к входам дешифратора, выход которого через элемент памяти соединен с входом интегратора, при § этом выходы таймера соединены с yci-a (Л новочным входом реверсивного счетчика и состробирующим входом элемента памяти. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕНДЕРИНГА АКУСТИЧЕСКОГО СИГНАЛА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ЗАПИСИ | 2015 |
|
RU2752600C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Труды ВНИИЭлектромеханики | |||
| Т | |||
| Механический грохот | 1922 |
|
SU41A1 |
| М., 1974, с | |||
| Крутильный аппарат | 1922 |
|
SU234A1 |
