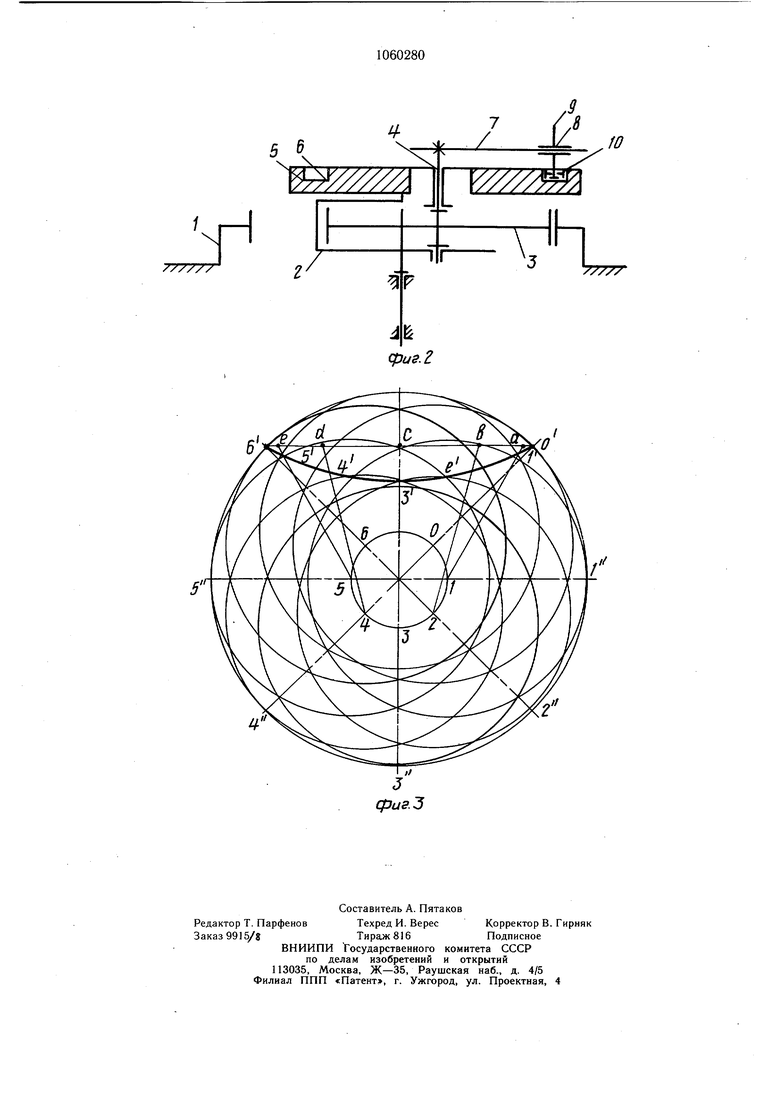
Изобретение относится к механизации и автоматизации машиностроительного производства и может быть использовано, например, в приводе грейферных линеек. Известно грейферное подающее устройство, содержащее планетарный механизм, в котором ведомое звено выполнено в виде эксцентрично установленного пальца 1. Однако планетарный механизм обеспечивает только продольное перемещение, поскольку траектория движения эксцентрично смещенного пальца представляет собой укороченную эпициклоиду с двумя прямолинейными участками, используемыми для выстоя линии на поперечных подачах. Наличие двух отдельных механизмов для продольной и поперечной подачи уменьшает точность и надежность подающего устройства, поскольку необходимо предусмотреть согласование поперечного и продольного приводов. Наиболее бл изким к изобретению является привод к устройству для подачи заготовок в штамп, содержащий планетарный механизм с водилом, сателлитом и солнечным колесом, пазовый кулачок, установленный на оси сателлита, радиальный элемент. связанный с осью сателлита, ведомое звено, выполненное в виде подвижного эксцентричного пальца, установленного с возможностью взаимодействия с пазовым кулачком и радиальным элементом 2. Недостатком известного привода является то, что вся нагрузка при подаче загото80К приходится на ось сателлита, что значительно уменьшает жесткость конструкции, вследствие чего привод может быть использован лишь для подачи деталей небольшого веса. Цель изобретения - повышение надежности привода путем уменьшения нагрузок на ось сателлита. Поставленная цель достигается тети, что в приводе к устройству для подачи заготовок, содержащем планетарный механизм с водилом, сателлитом и солнечным колесом, пазовый кулачок, установленный на оси сателлита, радиальный элемент, связанный с осью сателлита, ведомое звено, выполненное в виде подвижного эксцентричного пальца, установленного с возможностью взаимодействия с пазовым кулачком и радиальным элементом, пазовый кулачок жестко связан с водилом и свободно установлен на оси сателлита, а радиальный элемент жестко связан с осью сателлита. Благодаря такому выполнению привода ось сателлита оказывается шарнирно закрепленной в двух точках, а именно в месте соединения оси сателлита с водилом и в месте крепления к ней кулачка, а значит основные нагрузки воспринимает йе ось сателлита, а водило, которое мы можем выполнить как корпусную деталь, т.е. элемент. способный воспринимать большие нагрузки. На фиг. 1 изооражен предлагаемый привод, общий вид; на фиг. 2 - кинематическая схема привода; на фиг. 3 - траектория движения пальца. Привод к подающему устройству содержит планетарную передачу, состоящую из зубчатого венца 1, водила 2 и сателлита 3. СЗсь 4 сателлита 3 шарнирно закреплена на водиле 2. Водило 2 является корпусной деталью, на которой жестко смонтирован куачок 5 с профилированным пазом 6. На оси 4 сателлита 3 жестко смонтирован радиальный элемент 7, выполненный, например, в виде направляющей, на котором подвижно установлен эксцентричный палец 8, верхняя часть 9 которого связана с подающим органом (не показан), а нижняя выполнена в виде ролика 10, взаимодействующего с профилированным пазом 6 кулачка 5. Привод к подающему устройству работает следующим образом. При вращении водила 2 эксцентричный палец 8 одновременно участвует в двух движениях. Во-первых, вместе с сателлитом 3 он обкатывается по зубчатому колесу 1, поскольку радиальный элемент 7 и сателлит 3 составляют вместе жесткую конструкцию. Траектория движения эксцентричного пальца 8 при этом такая же, какова траектория соответствующей ему тачки на сателлите 3, т.е. точки, расположенной на таком же расстоянии от оси сателлита, как и ось эксцентричного пальца 8. Так, если отношение Диаметра делительной окружности зубчатого колеса 1 к диаметру делительной окружности сателлита 3 составляет 4:3 или 4:1, а эксцентричный палец 8 расположен от оси сателлита на расстоянии, равном радиусу делительной окружности сателлита, то траектория эксцентричного пальца 8 представляет собой астроиду (фиг. 3, жирная линия). Во-вторых, эксцентричный палец 8 совершает возвратно-поступательное перемещение по радиальному элементу 7. Такое перемещение возможно в силу того. что эксцентричный палец 8 одновременно принадлежит двум элементам, имеющим разную угловую скорость: сателлиту 3 (благодаря радиальному элементу 7), а также кулачку 5 и водилу 2 (благодаря ролику 10), поэтому эксцентричный палец 8 как бы обкатывается роликом 10 по профильному пазу 6 в кулачке 5. Результирующая этих двух перемещений зависит от профиля профильного паза 6 кулачка 5. Можно спроектировать такой профиль паза 6, что результирующей этих двух перемещений будет квадратная траектория. Говоря о квадратной траектории, следует обратить внимание на то, что соотношение диаметра делительной окружности сателлита к диаметру делительной окружности зубчатого венца равное 4:3 при относительно малых ходах подающего органа, а 4:1 - при больших, Изобретение более надежно в работе за счет снижения нагрузок на ось сателлита.
5 6
W////4 У///.
N
У
ХХУХХ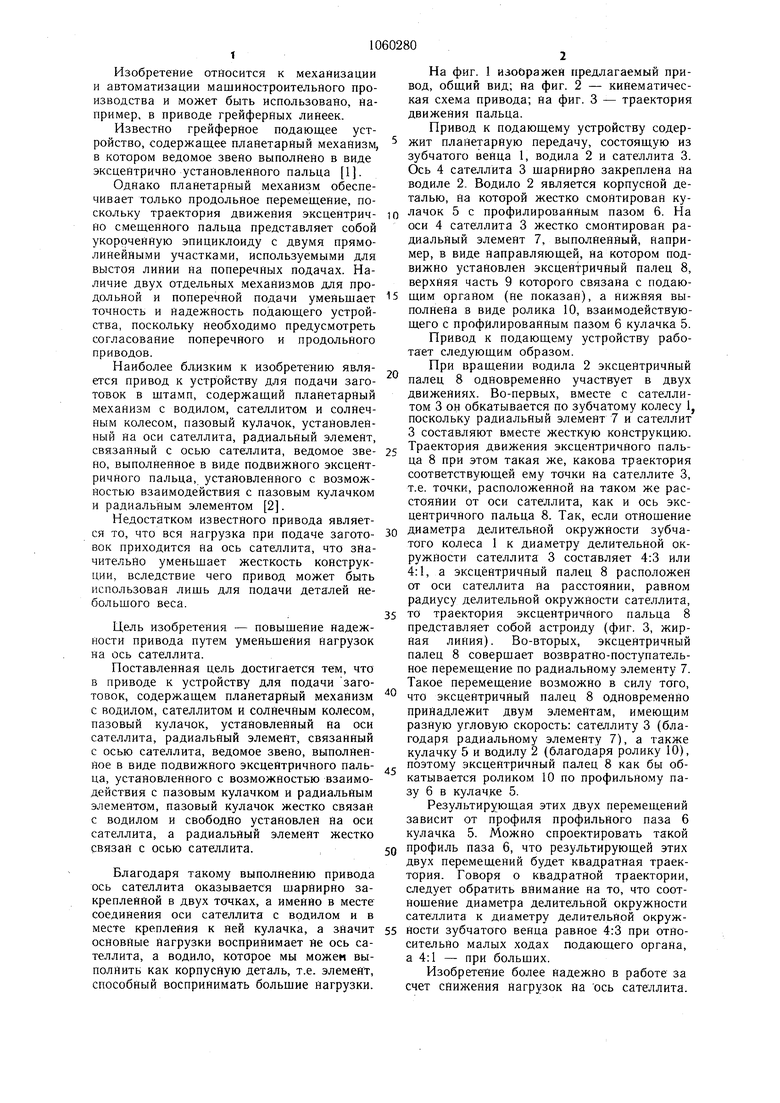
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод к устройству для подачи заготовок в штамп | 1981 |
|
SU963632A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Привод грейферного подающего устройства | 1976 |
|
SU1094579A3 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2224935C2 |
| ПОРШНЕВАЯ МАШИНА | 2002 |
|
RU2224113C2 |
| Привод пантографа устройства для укладки волокна в контейнер | 1977 |
|
SU679503A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Грейферное подающее устройство к прессу | 1989 |
|
SU1676724A1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
ПРИВОД К УСТРОЙСТВУ ДЛЯ ПОДАЧИ ЗАГОТОВОК, содержащий планетарный механизм с водилом, сателлитом и солнечным колесом, пазовый кулачок, установленный На оси сателлита, радиальный элемент,-связанный с осью сателлита, ведомое звено, выполненное в виде подвижного эксцентричного пальца, установленного с возможностью взаимодействия с пазовым кулачком и радиальным элементом, отличающийся тем, что, с целью повышения надежности, пазовый кулачок жестко связан с водилом и свободно установлен на оси сателлита, а радиальный элемент жестко связан с осью сателлита. (Л О5 о to 00 cpus.i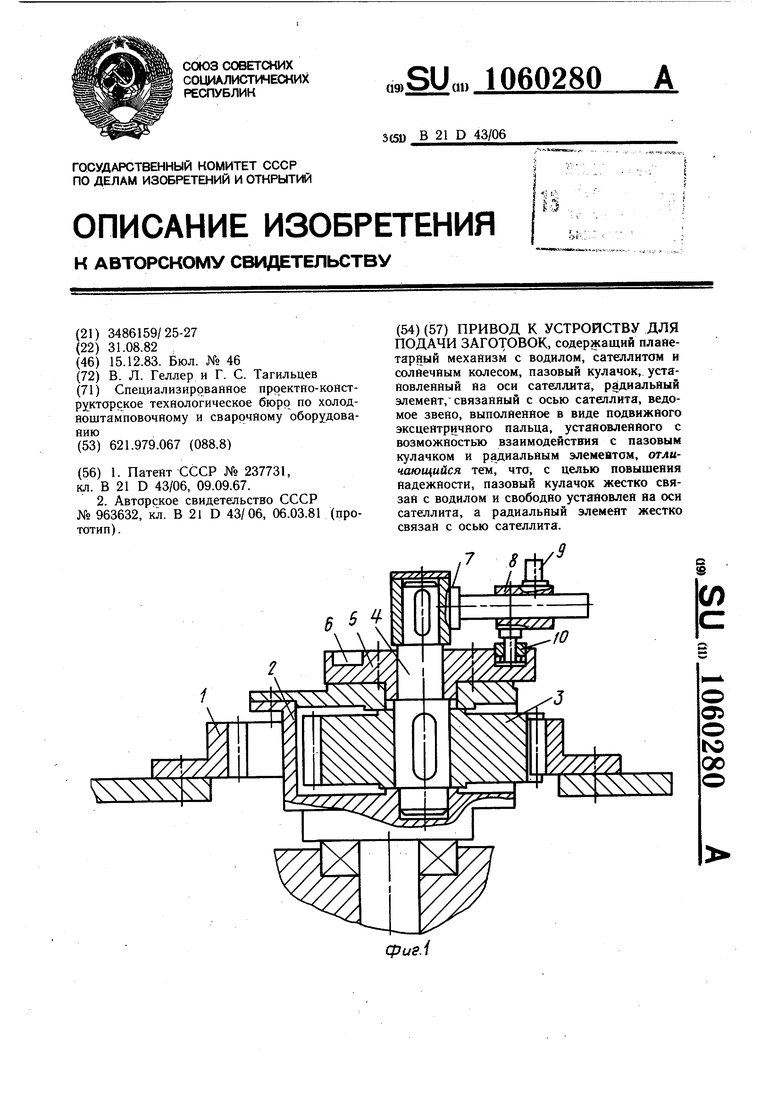
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU237731A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Привод к устройству для подачи заготовок в штамп | 1981 |
|
SU963632A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
