Изобретение относится к области обработки металлов давлением, а именно к приводам устройств для подачи заготовок в штамп с помощью грейферных линеек.
Известен привод к устройству для подачи заготовок в штамп, содержащий планетарный механизм, в котором ведомое звено выполнено в виде эксцентрично установленного пальца .
Недостатком известного привода является наличие в нем двух механизмов для обеспечения продольного и поперечного перемещения грейферных линеек.
Целью изобретения является упрощение конструкции.
Поставленная цель достигается тем, что в приводе к устройству для подачи заготовок в штамп, содержащем планетарный механизм, в котором ведомое звено выполнено в виде эксцентрично установленного пальца, планетарный механизм выполнен с внутренним зацеплением с отношением среднего диаметра зубчатого венца к среднему диаметру сателлита 4 : 3 и снабжен смонтированным на сателлите корпусом с крялшкой, в которой выполнен радиальный паз, кулачком с пазом, жестко
связанным с осью сателлита, причем ведомое зпено установлено одним концом в пазу кулачка, а другим в радип альном пазу крышки ксчрпуса, при этом профиль паза кулачка описан следующей зависимостью
) РО
to
где Rifi/l - расстояние от центра
кулачка до его i-й точки; р - минимальный радиус кулачка
t/ - угол поворота пальца от15носительно оси сателлита; PJ - расстояние от ветви астроиды, вписанной в круг, диаметр которого равен диаметру делительной ок20ружности зубчатого венца до прямой, соединяющей ее вершины.
На фиг. 1 изображен предлагаемый привод, общий вид; на фиг. 2 - то
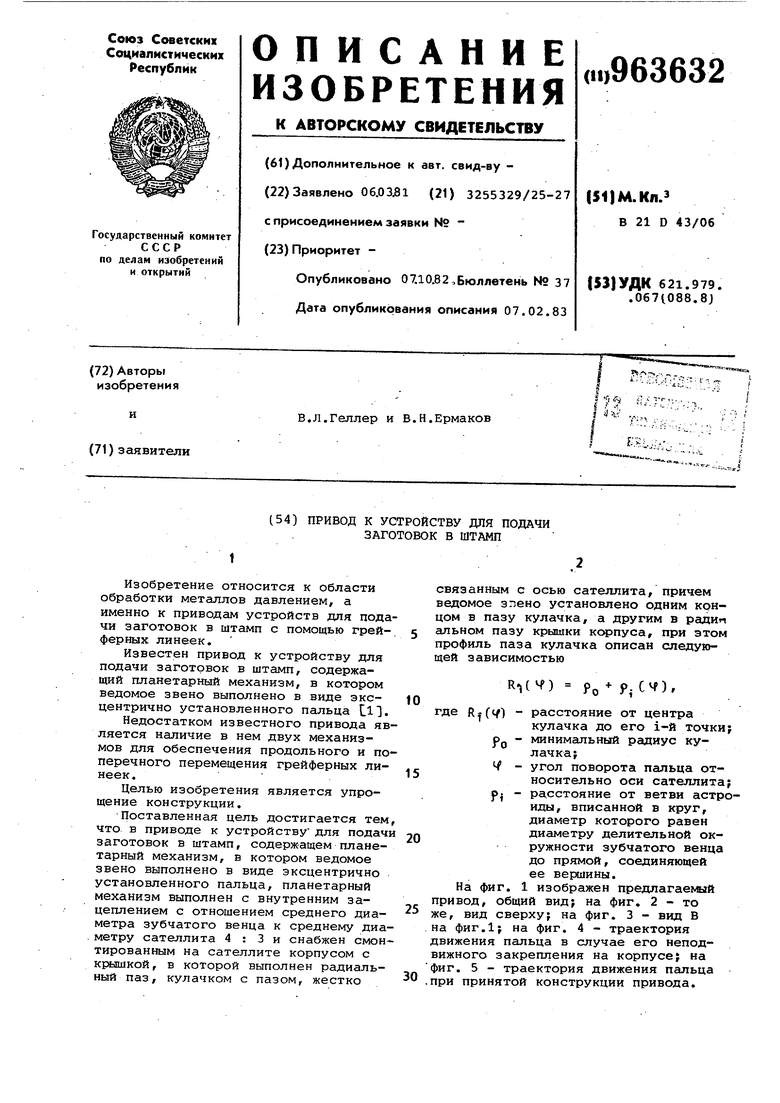
25 же, вид сверху; на фиг. 3 - вид В на фиг.1; на фиг. 4 - траектория движения пальца в случае его неподвижного закрепления на корпусе; на фиг. 5 - траектория движения пальца
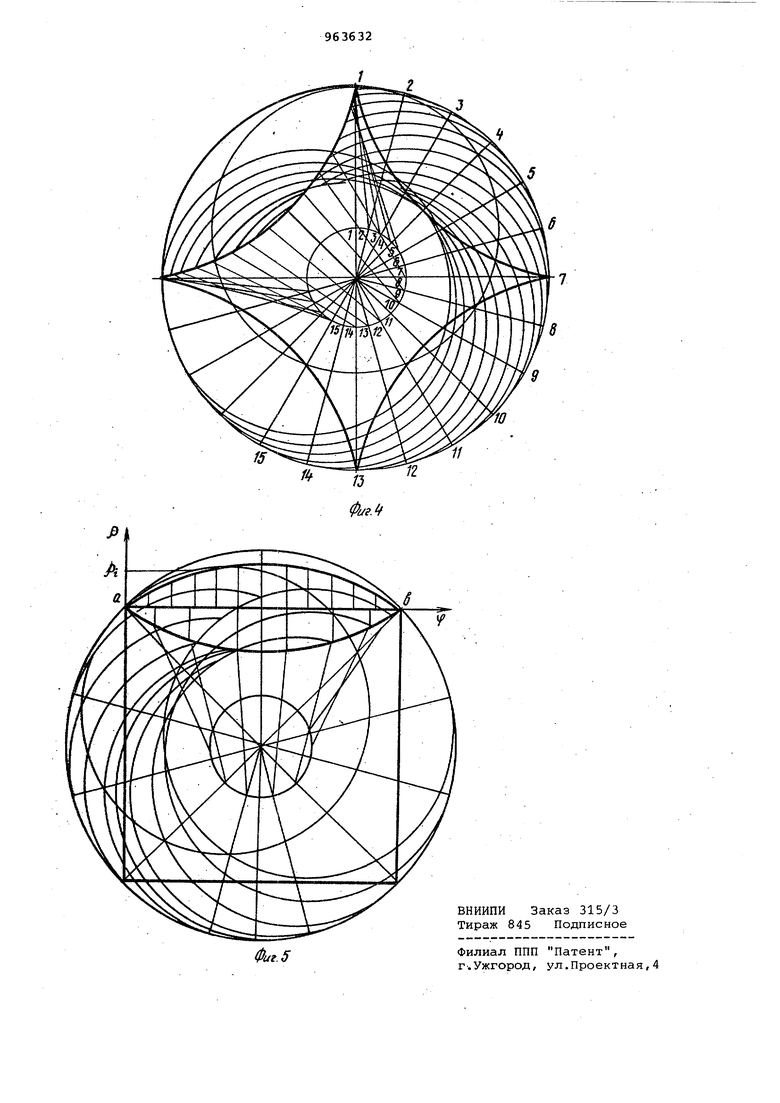
30 .при принятой конструкции привода. Привод к подающему устройству содержит планетарный механизм внутреннего зацепления, состоящий из водила 1, зубчатого венца 2 и сателлита 3. Отношение среднего диаметра зубчатого венца 2 к диаметру сателли та 3 равно 4:3. Сателлит 3 свободно вращается вокруг своей оси 4, а на самом сателлите 3 жестко смонтирован корпус 5, в крышке 6 которого выполнен радиальный паз 7. В радиальном пазу 7 установлено звено 8, ось которого в начальномположении совпадает с осью сателлита 3, выполненное в виде ползушки, имеющей нижнюю ось 9. На нижней оси 9 звена 8 находится ролик 10, посредством кот рого получается геометрическое замы кание звена 8 с пазовым кулачком 11 который в свою очередь закреплен неподвижно относительно оси 4 водила Палец 12, жестко связанный с роликом 10, взаимодействует с рабочим органо Работает привод к подающему устро ству следующим образом. Водило 1 вместе с осью 4 и пазовым кулачком 11 вращается вокруг оси 13 привода. Сателлит 3, шарнирно закрепленный на оси 4, наряду с вращением вокруг оси 13 привода вместе с осью 4 будет вращаться вокруг последней за счет зацепления с неподвижным зубчатым венцом 2. По тому же закону, что и сателлит 3, будут вращаться корпус 5 и крышка 6. Аналогич ный закон движения был бы и у звена 8, если бы оно было жестко смонтировано на корпусе 5. При этом его результирующая траек тория зависела бы от положения на корпусе б. Так, например, при отношении диаметра зубчатого венца 2 к диаметру 3, равном 4:3, и при совпадении оси звена 8 со средним диаметром сателлита оно совершало бы движение по астроиде, изображенной на фиг. 4. Однако в силу того, что звено 8 нижней своей частью, выполненной в виде ролика 10 взаимодействует с пазовым кулачком 11, обкатываясь по нему, а также в силу разности угловых скоростей корпуса 5 и пазового кулачка 11, звено 8, наряду с совместным движением с корпусом 5, буде совершать возвратно-поступательною перемещение относительно последнего по радиальному пазу 7. Результирующая траектория папьца 12 при этом будет зависеть как от начального положения звена 8 на корпусе 5, так и от профиля пазового кулачка 11. Изме нением профиля последнего можно полу различные траектории движения пальца 12. Для получения строго прямоугольной траектории пальца 12 необходимо иметь профиль кулачка 11, который строится следующим образом. Строим гипоциклоиду (см. фиг. 5J при отношении диаметра зубчатого венца к диаметру сателлита, равном 4:3 (астроида). Затем строим зеркальное отражение этой ветки относительно оси Ч . Потом делим отрезок аЬ, соединяющий соседние вершины астроиды на определенное количество равных частей и определяем каждому из получившихся участков,соответствующую ему ординату р. путем восстановления перпендикуляра до ветви астроиды. Затем делим окружность радиусом Р(, (см. фиг. 6) на равное количество частей соответственно делению отрезка аЬ и проводим через каждое деление из центра окружности лучи. На каждом из них откладываем отрезки, равные по величине р и соединяем полученные точки лекальной кривой, которая и будет профилем искомого кулачка. Предлагаемое устройство может использоваться везде, где необходимо преобразование вращательного движения в движение по прямоугольнбй или квадратной траектории, например для привода грейферной подачи. Формула изобретения Привод к устройству для подачи заготовки в штамп, содержащий планетарный механизм, в котором ведомое звено выполнено в виде эксцентрично установленного пальца, отличающ и и с я тем, что, с целью упрощения конструкции, планетарный механизм выполнен с внутренним зацеплением с отношением среднего диаметра зубчатого венца к .среднему диаметру сателлита 4:3 и снабжен смонтированном на сателлите корпусом с крышкой, в которой выполнен радиальный паз, кулачком с пазом, жестко связанным с осью сателлита, причем ведомое звено установлено одним концом в пазу кулачка, а другим - в радиальном пазу крышки корпуса, при этом профиль паза в кулачке описан следующей зависимостьюR,- СМ) ро р,- (f) где R;J (if) - расстояние от центра кулачка до его i-й точки; PQ - минимальный радиус кулачка;Ч - угол поворота пальца относительно оси сателлита; Pii) - расстояние от ветви астроиды, вписанной в круг.диаметр которого равен диаметру делительной окружности зубчатого венца до прямой, соединяющей ее вершины.
Источники информации, принятые во внимание при экспертизе
1. Патент СССР 237731, кл. В 21 D 43/06, опублик. 09,09.67 (прототип).12
Фиг. 1
Фиг. 2
//
ае.5