Фиг. 2
Изобретение относится к робототехнике, а. точнее к губкам схватов роботов и манипуляторов.
Цель изобретения - увеличение грузоподъемности.
На фиг. 1 изображена полость губки выполнена в виде замкнутой оболочки; на фиг. 2 - полость губки образована оболочкой и стенкой рычага.
Схват робота (манипулятора) содержит установленные на рычагах 1 губки 2 схвата, выполненные в виде герметичных оболочек, по крайней мере часть стенки которых выполнена эластичной. Каждая из губок 2 может быть выполнена в виде замкнутой эластичной оболочки 3 (см. фиг. 1).
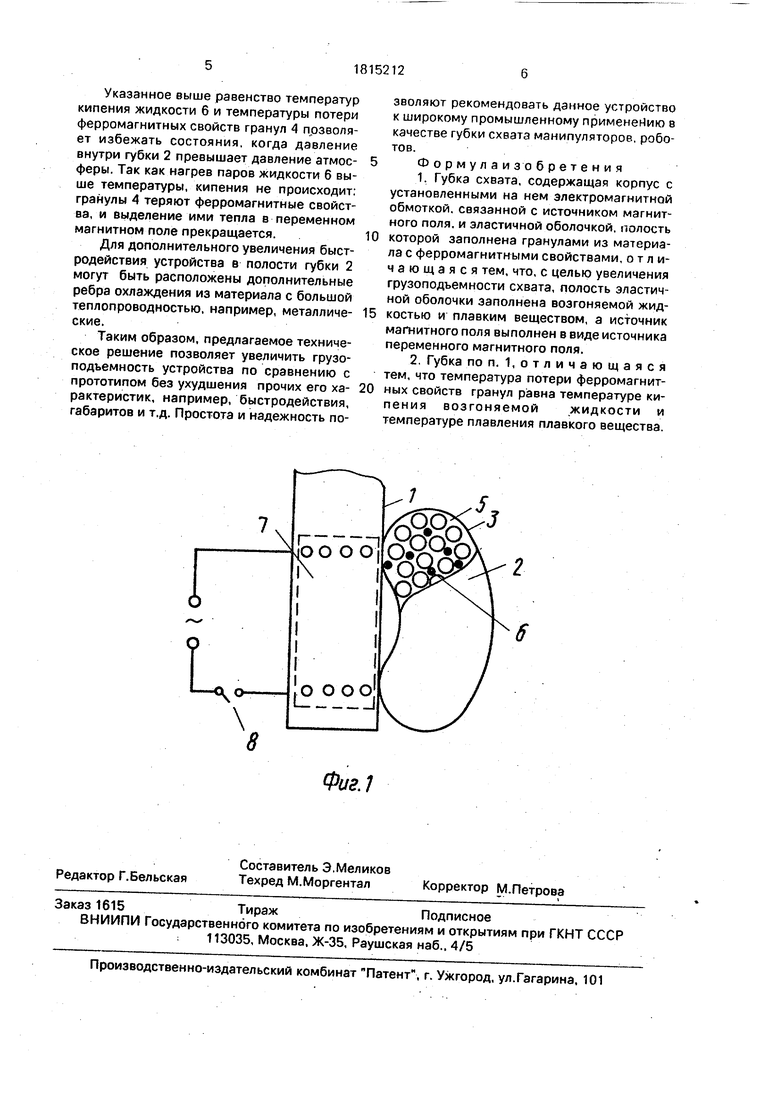
Возможно выполнение губки 2 в виде эластичной оболочки 3, концы которой герметично соединены с рычагом 1 (см. фиг. 2) и т.д. Полость губки 2 заполнена гранулами 4 с ферромагнитными свойствами, содержит плавкое вещество 5, а также жидкость 6. Причем температура потери ферромагнитных свойств гранул 4 равно температуре плавления плавкого вещества 5 и равна температуре кипения жидкости 6. Количество жидкости 6 выбирается таким образом, что при ее испарении давление в полости губки 2 равно атмосферному. Кроме того, губка 2 схвата снабжена источником 7 переменного магнитного поля, которое соединено с коммутирующим устройством 8. Источник 7 может быть установлен на рычаге 1 схвата.
Гранулы 4 могут быть выполнены из ферромагнитного материала, например, в виде железных зерен или могут содержать ферромагнитные включения. Возможно выполнение гранул 4 с ферромагнитным ядром, окруженным оболочкой, например, из полимера для предотвращения потери ферромагнитных свойств гранулами 4 при окислении, взаимодействия с жидкостью 6 и т.д. Кроме того, для предотвращения стенками плавкого вещества 5 в нижнюю часть полости губки 2 гранулы 4 могут быть выполнены пористыми либо содержать пористую оболочку 9 (см. фиг. 2). С той же целью, а также для увеличения поверхности взаимодействия с гранулами 4 в качестве материала гранул 4 целесообразно, выбирать вещество, смачиваемое расплавом плавкого вещества 5. Выполнение аналогичного условия для жидкости 6 (смачивание материала гранул 4) позволяет более эффективно производить нагрев жидкости 6 за счет равномерного поглощения тепла от гранул 4 по всему объему полости губки 2.
Устройство работает следующим образом.
Для захвата детали разводят рычаги 1 (с помощью силового механизма) и обеспечивают уменьшение жесткости губок 2. С этой целью через коммутирующее устройство 8
включают источник 7 переменного магнитного поля, например, подключают катушку индуктивности к источнику переменного тока. При этом происходит периодическое пе- ремагничивание гранул 4 в переменном
0 магнитном поле источника 7, сопровождающееся выделением тепла по объему полости губки 2 схвата. В результате одновременно осуществляется нагрев и плавление плавкого вещества 5 и испарение жидкости 6. Пе5 реход в жидкое состояние плавкого вещества 5 увеличивает подвижность гранул 4 одна относительно другой и уменьшает жесткость губки 2. Испарение жидкости б сопровождается увеличением давления в
0 полости губки 2 до величины атмосферного давления, что также уменьшает собственную жидкость губки 2.
Затем сводят рычаги 1. При этом происходит деформация эластичных оболочек 3 и
5 перераспределение гранул 4 в губках 2. В результате губки 2 повторяют форму детали. После чего источник 7 переменного магнитного поля отключают. Выделение тепла гранулами 4 прекращается. Происходит ох0 лаждение и затвердевание плавкого вещества 5. Силы сцепления между гранулами 4 увеличиваются. Одновременно происходит охлаждение и конденсация паров жидкости 6. При этом давление внутри губки 2 падает,
5 и воздействие атмосферы спрессовывает гранулы 4. Жесткость губки 2 увеличивается, и деталь фиксируется в захвате.
Для освобождения детали разводят рычаги 1. Схват готов к работе. Для захвата
0 новой детали повторяют перечисленные выше операции.
Пористая оболочка 9 при спрессовывании гранул 4, деформируясь, обеспечивает надежное сцепление 6 гранул 4 при тверде5 нии вещества 5.
Выбор плавкого вещества 5 и жидкости 6 таким образом, чтобы температура плавления первого равна температуре кипения последнего.,позволяет оптимально согла0 совать энергозатраты на работу устройства и его быстродействие. В этом случае переход из состояния губки 2 с наибольшей жесткостью (фиксация детали) в состояние с наименьшей жесткостью (охват детали) или
5 обратно происходит за кратчайшее время с минимально необходимыми затратами энергии, так как оба процесса, обеспечива- ющих этот переход: плавление (затвердевание) вещества 5 и испарение (конденсация) жидкости 6. - происходят одновременно.
Указанное выше равенство температур кипения жидкости 6 и температуры потери ферромагнитных свойств гранул 4 позволяет избежать состояния, когда давление внутри губки 2 превышает давление атмосферы. Так как нагрев паров жидкости б выше температуры, кипения не происходит: гранулы 4 теряют ферромагнитные свойства, и выделение ими тепла в переменном магнитном поле прекращается.
Для дополнительного увеличения быстродействия устройства в полости губки 2 могут быть расположены дополнительные ребра охлаждения из материала с большой теплопроводностью, например, металлические.
Таким образом, предлагаемое техническое решение позволяет увеличить грузоподъемность устройства по сравнению с прототипом без ухудшения прочих его характеристик, например, быстродействия, габаритов и т.д. Простота и надежность позволяют рекомендовать данное устройство к широкому промышленному применению в качестве губки схвата манипуляторов, роботов. Формулаизобретения
1. Губка схвата, содержащая корпус с установленными на нем электромагнитной обмоткой, связанной с источником магнитного поля, и эластичной оболочкой, полость
которой заполнена гранулами из материала с ферромагнитными свойствами, отличающаяся тем, что, с целью увеличения грузоподъемности схвата, полость эластичной оболочки заполнена возгоняемой жидкостью и плавким веществом, а источник магнитного поля выполнен в виде источника переменного магнитного поля.
2. Губка по п. 1,отличающаяся тем, что температура потери ферромагнит- ных свойств гранул равна температуре кипения возгоняемой жидкости и температуре плавления плавкого вещества.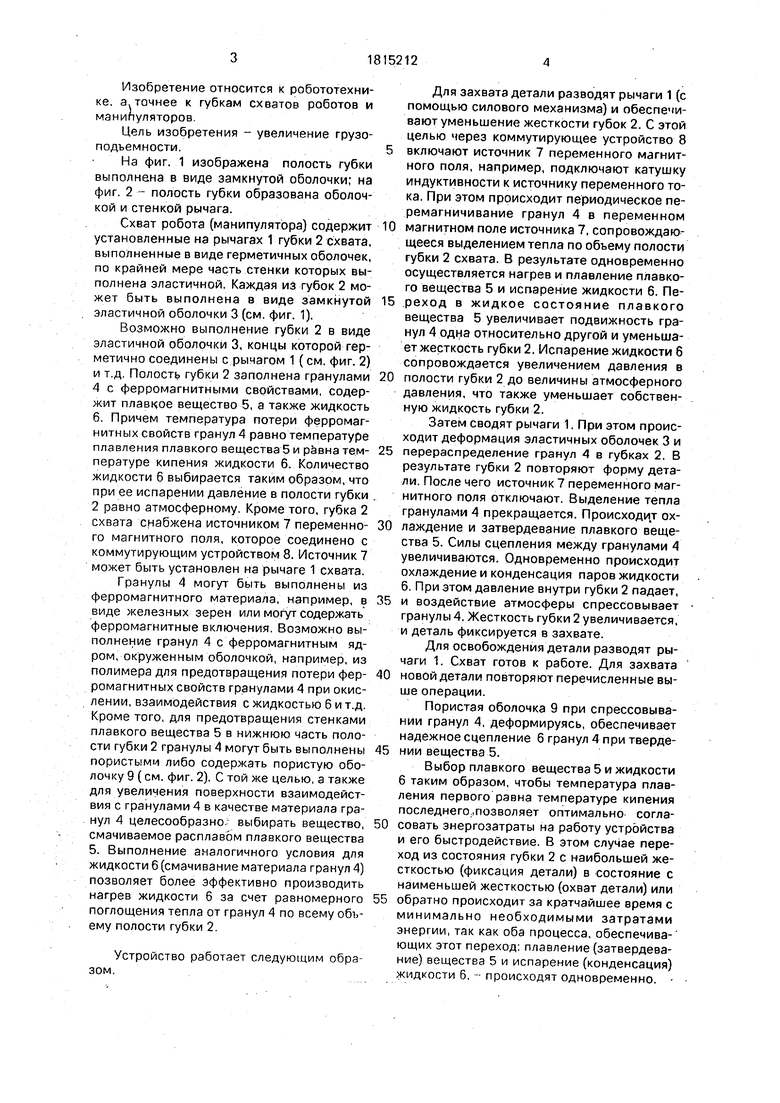
| название | год | авторы | номер документа |
|---|---|---|---|
| Губка схвата | 1987 |
|
SU1451002A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Губка для захвата хрупких деталей | 1990 |
|
SU1812101A1 |
| Схват манипулятора | 1986 |
|
SU1364471A2 |
| Схват промышленного робота | 1986 |
|
SU1404336A1 |
| Схват манипулятора | 1987 |
|
SU1511116A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1134362A1 |
| Схват | 1986 |
|
SU1393628A1 |
Использование: машиностроение, в захватных органах роботов и манипуляторов. Сущность изобретения: губка содержит корпус 1-е установленными на нем электромагнитной обмоткой и эластичной оболочкой 3. Электромагнитная обмотка соединена с источником 7 переменного магнитного поля. А полость заполнена гранулами 4 из ферромагнитного материала, возгоняемой жидкостью 6 и плавким веществом 5. При этом температура потери ферромагнитных свойств гранул равна температуре кипения возгоняемой жидкости и температуре плавления плавкого вещества. Для захвата детали мягкость губок обеспечивают включением источника переменного магнитного поля. При этом осуществляется нагрев, плавление плавкого вещества и испарение жидкости. При контакте с деталью оболочка 3 деформируется. Источник переменного поля отключают. Плавкое вещество охлаждается и затвердевает, одновременно происходит конденсации паров жидкости. За счет этого падает давление внутри оболочки 3, что приводит к увеличению жесткости захвата. 1 з.п.ф-лы, 2 ил.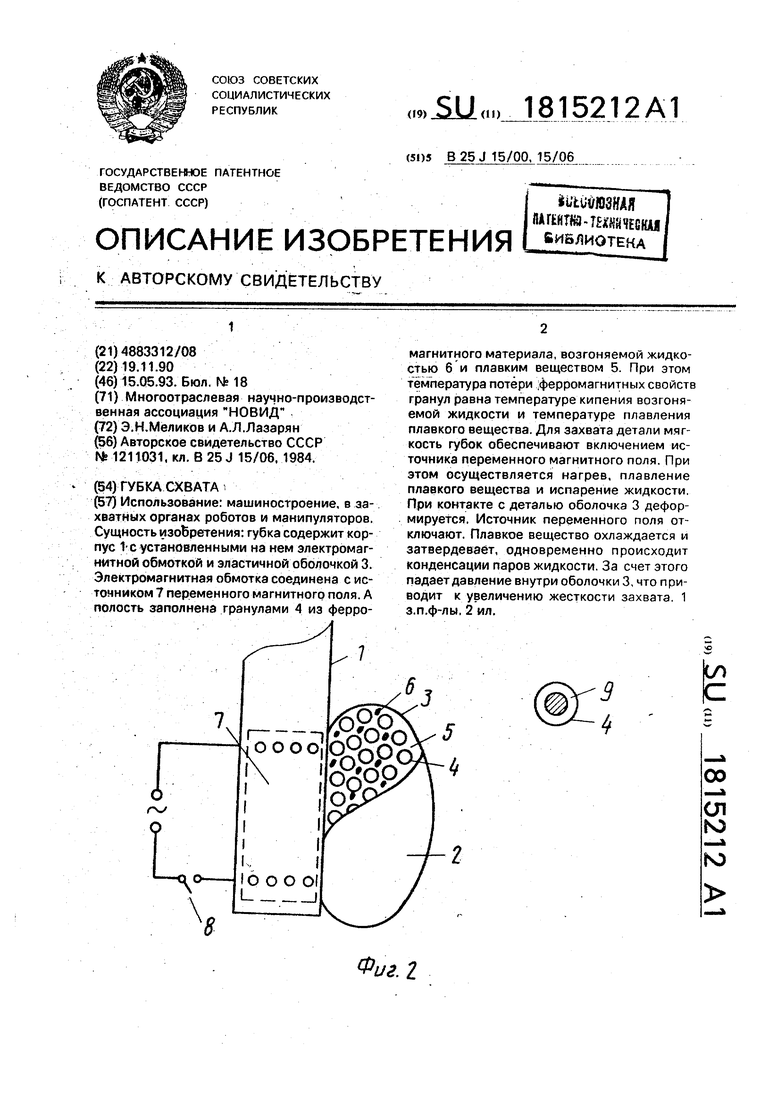
| Схват манипулятора | 1984 |
|
SU1211031A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
