о
35
N0
35
со
Изобретение относится к подъемно-транспортным устройствам, а именно к винтовым подъемникам, содержащим приводной винт и ходовую гайку, несущую на себе выдвижные телескопические секции, переметщающиеся по направляющей с помощью роликов.
Известен винтовой подъемник, содержащий грузовой приводной винт и ходовую гайку, соединенную с перемещающимися по направляющим посредством роликов консольными балками с платформами Y .
Недостаток известного подъемника заключается в его низкой производительности.
Целью изобретения является повышение производительности.
Цель достигается тем, что в винтовом подъемнике, содержащем грузовой приводной винт и ходовую гайку, соединенную с перемещающимися по направляющей посредством роликов консольными балками с платформами , направляющая выполнена в виде пустотелой со сквозной продольной щелью колонны и снабжена фиксирующей кольцевой опорой, на которой расположены насаженные на винт верхняя, средняя и нижняя телескопические секции, на каждой, из которых в верхней части установлены опорные, а в нижней части - несущие кольца, а ходовая гайка выполнена с несущим кольцом, при это на опорных и несущих кольцах закрелены направляющие ролики, а консольные балки с платформами жестко закреплены на верхней части ходово гайки, на опорных кольцах средних телескопических-, секций и на несущем кольце нижней телескопической секции.
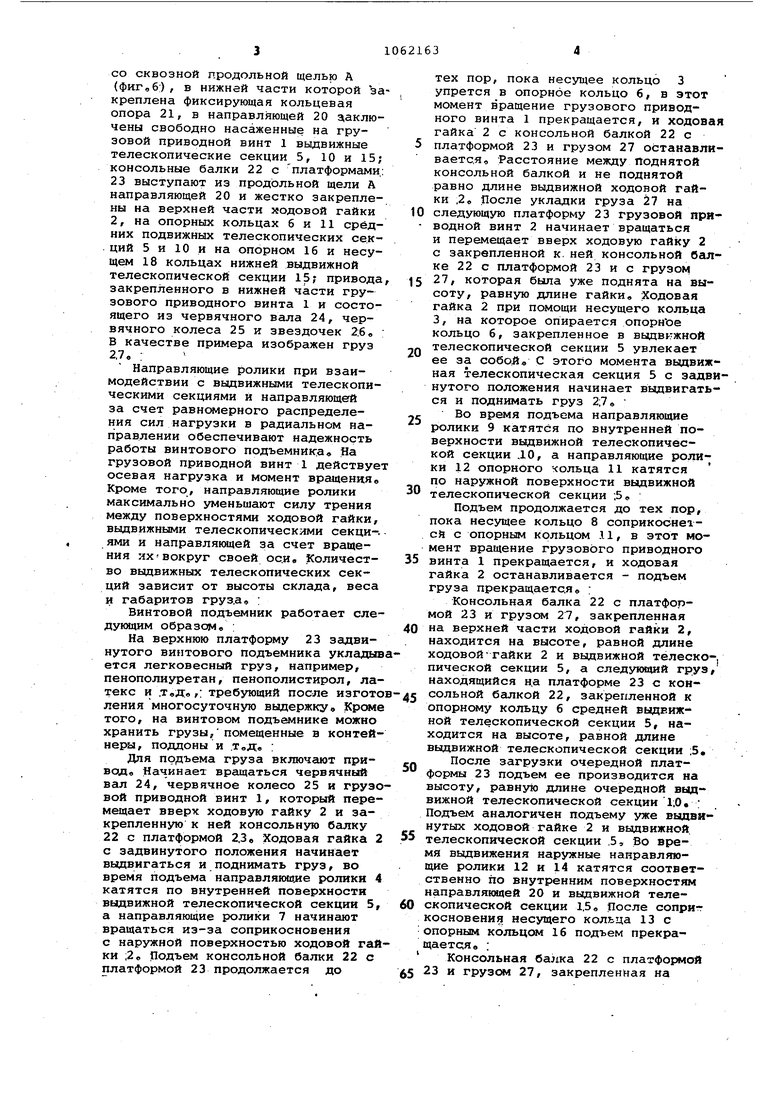
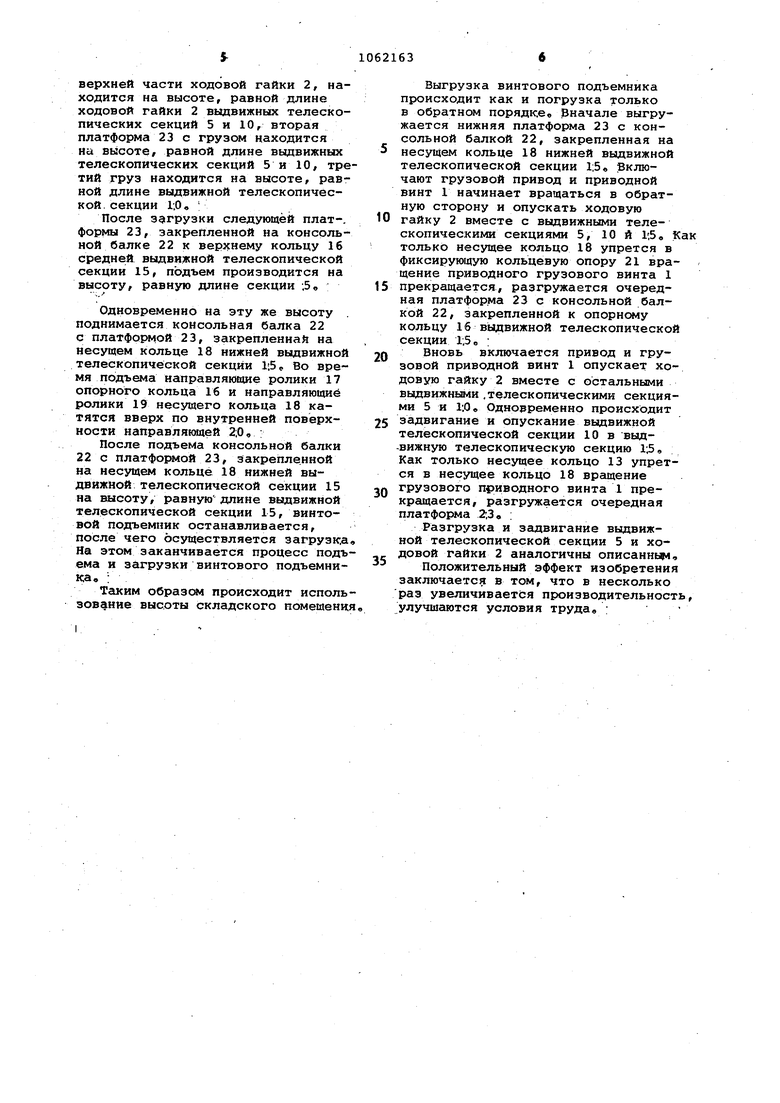
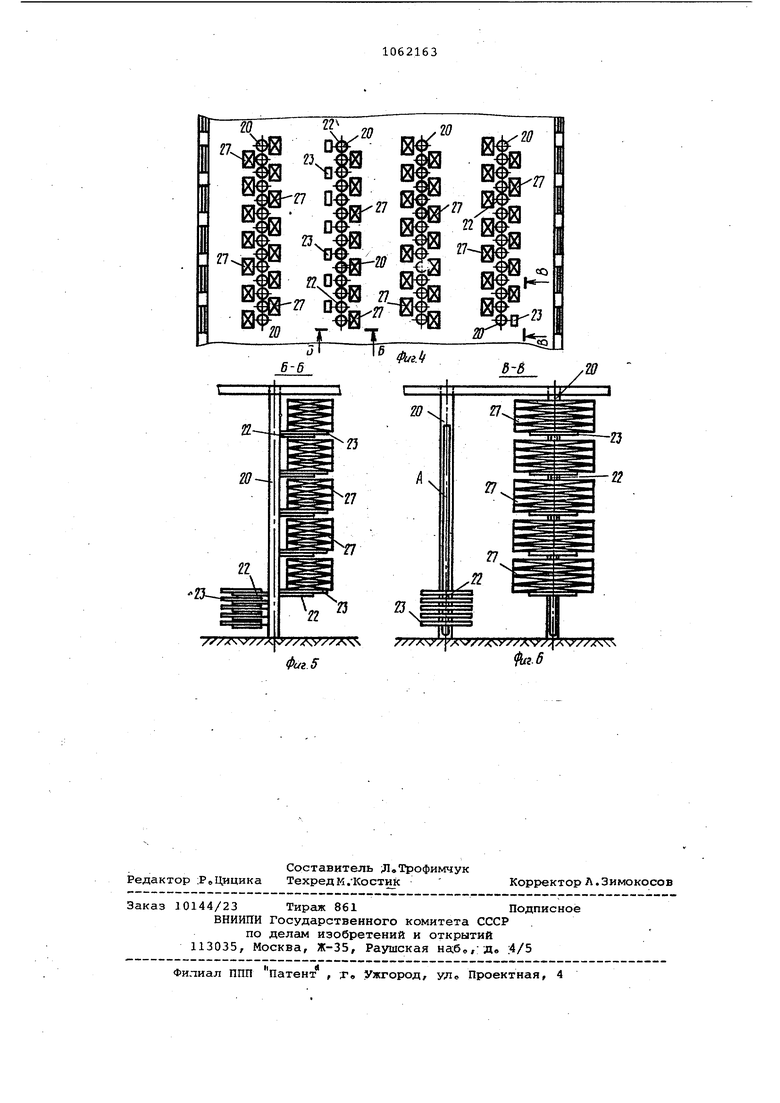
На фиг.1 изображен подъемник в сложенном состоянии; на фиг. 2 то же, с раздвинутыми секциями; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - пример планировки склада; на фиг. 5 - разрез Б-Б на фиг.4, ; {общий вид винтовых подъемников бе грузов и с грузом); на фиг 6 разрез В-В на фиг. 4 (общий вид винтовых подъемников без грузов и с грузом).
Шнтовой подъемник состоит из грузового приводного винта 1, взаимодействующего с ходовой гайкой 2, которая выполнена с несущим кольцом 3, по периметру которого в кромках пазов закреплены направляющие ролики 4; выдвижной телескопической секции 5, которая например, выполнена в виде цилиндра и свободно насажена на винт 1, в верхней части телескопической сеции 5 с внутренней стороны закреплено опорное кольцо 6, по периметру которого в кромках пазов вмонтированы направляющие ролики 7, причем внутренний диаметр опорного кольца 6, соответствует наружному диаметру ходовой гайки 2, а в нижней
части выдвижной телескопической секции 5 с наружной стороны закреплено несущее кольцо 8, по периметру которого в кромках пазов вмонтированы направляющие ролики 9,
0 внутренний диаметр отверстия несуцего кольца 8 несколько больше диаметра грузового приводного винта 1; выдвижной телескопической секции 10, которая, например, вы5 полнена в виде цилиндра и свободно насажена на выдвижную телескопическую секцию 5, наружный диаметр вьздвижной телескопической секции 10 соответствует наружному
Q диаметру несущего кольца 8, в верхней части телескопической секции 10 закреплено опорное кольцо 11, по наружному и внутреннему периметру которого.в кромках пазов
5 вмонтированы направляющие ролики Г2, причем внутренний -диаметр опорного кольца 11 соответствует диаметру выдвижной телескопической секции 5, а наружный ди,аметрвнутреннему диаметру направляющей, в нижней части выдвижной телескопической секции 10 закреплено несущее кольцо 13, по наружному периметру которого в кромках пазов вмонтированы направляющие ро лики 14, внутренний дис1Метр отверстия несущего кольца 13 несколько больше диаметра грузового приводного винта 1; выдвижной телескопической секции 15, которая, например,
0 выполнена в виде цилиндра и свободно насажена на выдвижную телескопическую секцию 10, внутренний диаметр выдвижной телескопической секции 15. соответствует наружному диа5 метру несущего кольца, 13, а наружный диаметр - внутреннему диаметру направляющей, в верхней части выдвижной телескопической секции Г5 с внутренней стороны закреплено
Q опорное кольцо 16, по наружному и внутреннему периметру которого в кромках пазов вмонтированы направляющие ролики 17, причем внутренний диаметр опорного кольца 16 ссэртветствует наружному диаметру выдвижной телескопической секции 10, в нижней части выдвижной телескопической секции 15 закреплено несущее кольцо 18, по наружному периме ру которого в кромках пазов
вмонтированы направляющие ролики
19, внутренний диаметр отверстия несущего кольца 18 несколько больше дндметра грузового приводного винта 1; направляющей 20, которая вы65 полнена в виде пустотелой колонны
со сквозной продольной щелью А (фиг,6;) , в нижней части которой закреплена фиксирующая кольцевая опора 21, в направляющей 20 э aключены свободно насаженные на грузовой приводной винт 1 вьщвижные телескопические секции 5, 10 и 15; консольные балки 22 с платформами,: 23 выступают из продольной щели А направляющей 20 и жестко закреплены на верхней части ходовой гайки 2, на опорных кольцах 6 и 11 средних подвижных телескопических секций 5 и 10 и на опорном 16 и несущем 18 кольцах нижней выдвижной телескопической секции 15; привода закрепленного в нижней части грузового приводного винта 1 и состоящего из червячного вала 24, червячного колеса 25 и звездочек 2.6, В качестве примера изображен груз 2,7, :
Направляющие ролики при взаимодействии с выдвижными телескопическими секциями и направляющей за счет равномерного распределения сил нагрузки в радиальном направлении обеспечивают надежность работы винтового подъемника. На грузовой приводной винт 1 действует осевая нагрузка и момент вращения. Кроме того, направляющие ролики максимально уменьшают силу трения между поверхностями ходовой гайки, выдвижными телескопическими секци-. ями и направляющей за счет вращения яхвокруг своей ос.и« Количество вьщвижных телескопических секций зависит от высоты склада, веса и габаритов груз.а, :
Винтовой подъемник работает следукяцим образом, :
На верхнюю платформу 23 задвинутого винтового подъемника укладывется легковесный груз, например, пенополиуретан, пенополистирол, латекс и ,ТвД, ,: требующий после изготоления многосуточную выдержку Крсже того, на винтовом подъемнике можно хранить грузы,помещенные в контейHei:, поддоны и .т,д, :
Для подъема груза включают привел. Начинает вращаться червячный вал 24, червячное колесо 25 и грузовой приводной винт 1, который перемещает вверх xoдoвs гайку 2 и закрепленную к ней консольную балку 22 с платформой 2,3, Ходовая гайка 2 с задвинутого положения начинает выдвигаться и поднимать груз, во время подъема направляющие ролики 4 катятся по внутренней поверхности ВЕадвижной телескопической секции 5, а направляющие ролики 7 начинеиот вращаться из-за соприкосновения с наружной поверхностью ходовой гайки ;2, Подъем консольной балки 22 с платформой 23 продолжается до
тех пор, пока несущее кольцо 3 упрется в опорное кольцо 6, в этот момент вращение грузового приводного винта 1 прекращается, и ходовая гайка 2 с консольной балкой 22 с
5 платформой 23 и грузом 27 останавливается. Расстояние между поднятой консольной балкой и не поднятой равно длине выдвижной ходовой гайки ,2, После укладки груза 27 на
0 следующую платформу 23 грузовой при водной винт 2 начинает вращаться и перемещает вверх ходовую гайку 2 с закрепленной к.ней консольной балке 22 с платформой 23 и с грузом
5 27, которая была уже поднята на высоту, равную длине гайки. Ходовая гайка 2 при помощи несущего кольца 3, на которое опирается опорное кольцо 6, закрепленное в выдвижной
телескопической секции 5 увлекает
ее за собой, С этого момента вьвдвижная телескопическая секция 5 с задвинутого положения начинает выдвигаться и поднимать груз 2;7,
Во время подъема направляющие ролики 9 катятся по внутренней поверхности вьщвижной телескопической секции .10, а направляющие ро,лики 12 опорного кольца 11 катятся по наружной поверхности выдвижной
телескопической секции ,5,
Подъем продолжается до тех пор, пока несущее кольцо 8 соприкоснегсй с опорным кольцом 11, в этот момент вращение грузового приводного
винта 1 прекращается, и ходовая гайка 2 останавливается - подъем груза прекращается, :
Консольная балка 22 с платформой 23 и грузом 27, закрепленная
на верхней части ходовой гайКи 2, находится на высоте, равной длине ходовой тайки 2 и выдвижной телескопической секции 5, а следующий груз/ находящийся н,а платформе 23 с консольной балкой 22, закрепленной к опорному кольцу 6 средней выдвиж ной телескопической секции 5, находится на высоте, равной длине выдвижной телескопической секции ;5,
После загрузки очередной плат50
Формы 23 подъем ее производится иа высоту, равную длине очередной выдвижной телескопической секции 1;0, ; Подъем аналогичен подъему уже выдвинутых ходовой гайке 2 и выдвижной
55 телескопической секции ,5 Во время выдвижения наружные направляющие ролики 12 и 14 катятся соответственно по внутренним поверхностям направлякицей 20 и выдвижной теле60 скопической секции 1,5, После соприг косновения несущего кольца 13с :опорным кольцом 16 подъем прекращается, : Консольная балка 22 с платформой
5 23 и грузетл 27, закрепленная на
верхней части ходовой гайки 2, находится на высоте, равной длине ходовой гайки 2 выдвижных телескопических секций 5 и 10, вторая платформа 23 с грузом находится на высоте/ равной длине выдвижных телескопических секций 5 и 10, третий груз находится на высоте, равной длине выдвижной телескопической, секции 1;0в ;
После загрузки следующей плат-. формы 23, закрепленной на консольной балке 22 к верхнему кольцу 16 средней выдвижной телескопической секции 15, подъем производится на высоту, равную длине секции -.З
-.
Одновременно на эту же высоту поднимается консольная балка 22 с платформой 23, закрепленная на несущем кольце 18 нижней выдвижной телескопической секции 15, Во время подъема направляющие ролики 17 опорного кольца 16 и направляющие ролики 19 несущего кольца 18 катятся вверх по внутренней поверхности направляющей 2;0, ;
После подъема консольной балки 22 с платформой 23, закрепленной на несущем кольце 18 нижней выдвижной телескопической секции 15 на высоту, равную длине выдвижной телескопической секции 15, винтовой подъемник останавливается, после чего осуществляется загрузк-д На этом заканчивается процесс подъема и загрузки винтового подъемника, :
Тё1ким образе происходит использов ние высоты складского помещени
Выгрузка винтового подъемника происходит как и погрузка только в обратном порядке. Вначале выгружается нижняя платформа 23 с консольной балкой 22, закрепленная на несущем кольце 18 нижней выдвижной телескопической секции 1;5в Включают грузовой привод и приводной винт 1 начинает вращаться в обратную сторону и опускать ходовую гайку 2 вместе с выдвижными телескопическими секциями 5, 10 и 1,5в К только несущее кольцо 18 упрется в фиксирующую кольцевую опору 21 вращение приводного грузового винта 1 прекращается, разгружается очередная платформа 23 с консольной балкой 22, закрепленной к опорному кольцу 16 выдвижной телескопической секции 1.5 в :
Вновь включается привод и грузовой приводной винт 1 опускает ходовую гайку 2 вместе с остальными выдвижными.телескопическими секциями 5 и 1;0в Одновременно происходит задвигание и опускание выдвижной телескопической секции 10 в выд-вижную телескопическую секцию 1;5, Как только несущее кольцо 13 упрется в несущее кольцо 18 вращение грузового приводного винта 1 прекращается, разгружается очередная платформа 2.3в :
Разгрузка и задвигание выдвижной телескопической секции 5 и ходовой гайки 2 аналогичны описанньф4.
Положительный эффект изобретения заключается в том, что в несколько раз увеличивается производительност улучщаются условия труда, ;
б-В
x NNNXNVNN 4NNNj N NVvV4V VV4
Фиг.1 .
}
гз
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1986 |
|
SU1370044A1 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| Передвижной строительный подъемник | 1983 |
|
SU1123980A1 |
| Подъемник | 1989 |
|
SU1744061A1 |
| Подъемник для автомобилей | 1985 |
|
SU1306901A1 |
| ВЫНОСНАЯ ОПОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2361806C1 |
| ВЕРТИКАЛЬНЫЙ ПОДЪЕМНИК ДЛЯ ЛИЦ С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2003 |
|
RU2234451C1 |
| КАРТОФЕЛЕХРАНИЛИЩЕ | 1990 |
|
RU2019951C1 |
| ПОДЪЕМНОЕ ВИНТОВОЕ УСТРОЙСТВО | 2022 |
|
RU2797849C1 |
ВИНТОЮЙ ПОДЪЕМНИК, содержгиций грузовой приводной винт и ходовую гайку, coeдинeннsпo с перемещающимися по направляющей посредством роликов консольными балками с платфо1 1ами о т л и ч а ю ц и йс я .тем, что с целью,,пов1Я 1ения прсжзводителЬности, направлякицая выполнена в виде пустотелой со сквознЬй продольной щелью колонны и снабжена фиксирующей кольцевой опорой, на которой расположены насаженные на винт верхняя, средняя и нижняя телескопические секции, на каждой из которых в верхней части установлены опорные, а в нижней части - несущие кольца, & ходовая выполнена ei несущим кольцом, при этом на опорных и несущих кольцах закреплены направАяющие ролики, а консольные балки с платформами жестко закреплены на верхней части ходовой гай§ ки, на опорных кольцг1х средних телескопических секций и на несу(Л щем кольце нижней телескопической ;секции. с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВИНТОВОЙ ПОДЪЕМНИК | 0 |
|
SU364543A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
