Изобретение относится к подъемно- транспортным устройствам, а именно к винтовым подъемникам.
Цель изобретения - повышение эксплуатационных качеств.
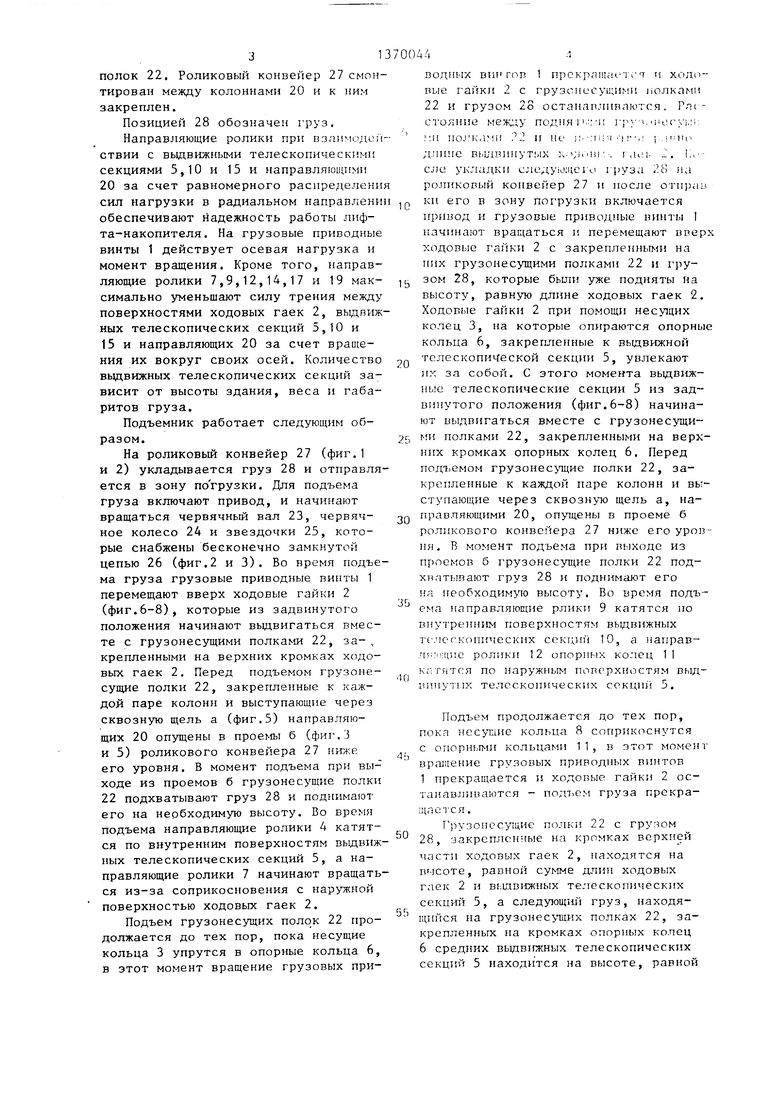
На фиг.1 схематически изображен подъемник, общий вид на фиг.2 - то же, с раздвинутыми полками; на фиг.3- то же, с развернутыми полками, вид сбокуJ на фиг.4 - то же, вид в плане на фиг.5 - разрез А-А на фиг.1; на фиг.6 - резрез Б-Б на фиг.4; на фиг.7- разрёз В-В на фиг.4; на фиг.8 - разрез Г-Г на фиг.1.
Подъемник содержит подъемно-опускное устройство, выполненное (фиг.6- 8) из грузовых приводных винтов 1, взаимодействующих с ходовыми гайками 2. Последние выполнены с несущими кольцами 3, по периметру которых в кромках пазов закреплены направляющие ролики 4, выдвижные телескопические секции 5, которые выполнены, например, в виде цилиндра и свободно насажены на грузовой приводной винт 1. В верхней части телескопической секции 5 с внутренней сторонь закреплены опорные кольца 6, по периметру которых в кромках пазов вмон- тированы направляющие ролики 7, причем внутренний диаметр опорных колец 6 соответствует наружному диаметру гайки 3, а в нижней части вьщвинутых телескопических секций 5 с наружной стороны закреплены несущие кольца 8, по периметру которых в кромках пазов вмонтированы направляющие ролики 9. Внутренний диаметр отверстия несудаг кольца 8 несколько больше диаметра грузового приводного винта 1 .
Выдвижные телескопические секции 10 выполнены, например, в виде цилиндра и насажены свободно на вьщвижные телескопические секции 5. Наружный диаметр выдвижных телескопических секций 10 соответствует наружному диаметру несущих колец 8. В верхней части телескопических секций Ю закреплены опорные кольца 11, по наружному и внутреннему диаметру которых в кромках пазов вмонтированы направляющие ролики 12. Внутренний диаметр опорных колец 11 соответствует диаметру выдвижных телескопических секций 5, а наружный диаметр - внутреннему диаметру направляющих. В нижних частях вьщвижных телескопических секций 10 закреплены несущие кольца 13,
5
0
5
0
5
0
0
5
по наружному периметру которых в кромках пазов вмонтированы направляющие ролики 14. Внутренний диаметр отверстий несущих колец 13 несколько больше диаметра грузовых приводных винтов 1.
Выдвижные телескопические секции
15выполнены в виде цилиндра и свободно насажены на выдвижные телескопические секции 10, Внутренний диаметр выдвижных телескопических секций 15 соответствует наружному диаметру несущих колец 13, а внутренний диаметр - внутреннему диаметру направляющих. В верхней части выдвижных телескопических секций 15 с внутренней стороны закреплены опорные кольца 16, по наружным и внутренним периметрам которых в кромках пазов вмонтированы направляющие ролики 17, причем внутренний диаметр опорных колец
16соответствует наружному диаметру вьщвижных телескопических секций 10. В нижней части выдвижных телескопических секций 15 закреплены несущие кольца 18, по наружному периметру которых в кромках пазов вмонтированы направляющие ролики 19, внутренний диаметр отверстий несущих колец 18 несколько больше диаметра грузовых приводных винтов 1.
Направляющие 20 выполнены в виде пустотелых колонн со сквозной продольной щелью а (фиг.5), в нижней час- ти которых закреплены фиксирующие кольцевые опоры 21 (фиг.6 и 7). В направляющих 20 заключены свободно - насаженные на грузовые приводные, винты 1 вьщвижные телескопические секции 5,10 и 15. При этом направляющие 20 установлены так, что их оси совпадают с точками скрещивающихся прямых, образующих прямоугольник, . спарены грузонесущими полками 22, выполненными в виде брусов и жестко прикрепленными обоими концами к опорным кольцам 6,11 и 16, к несущим кольцам и на верхней ходовой части ходовых гаек 2. Привод закреплен в нижней части одного из грузовых приводных винтов 1 и состоит из червячного вала 23, червячного колеса 24 и звездочек 25, причем грузовые приводные винты 1 со звездочками огибаются бесконечно замкнутой цепью 26. Роликовый конвейер 27 вьшолнен с поперечными проемами б (фиг.З и 5), равными ширине балок грузонесущих
31
полок 22, Роликовый конвейер 27 смонтирован между колоннами 20 и к ним закреплен.
Позицией 28 обозначен груз.
Направляющие ролики при взаимодс ствии с вьщвижными телескопическими секциями 5,10 и 15 и направляющими 20 за счет равномерного распределени сил нагрузки в радиальном направлени обеспечивают надежность работы лифта-накопителя. На грузовые приводные винты 1 действует осевая нагрузка и момент вращения. Кроме того, направляющие ролики 7,9,12,14,17 и 19 максимально уменьшают силу трения между поверхностями ходовых гаек 2, выдвижных телескопических секций 5,10 и 15 и направляющих 20 за счет вращения их вокруг своих осей. Количество вьщвижных телескопических секций зависит от высоты здания, веса и габаритов груза.
Подъемник работает следующим образом.
На роликовый конвейер 27 (фиг.1 и 2) укладывается груз 28 и отправляется в зону по грузки. Для подъема груза включают привод, и начинают вращаться червячный вал 23, червячное колесо 24 и звездочки 25, которые снабжены бесконечно замкнутой цепью 26 (фиг.2 и 3). Во время подъема груза грузовые приводные винты 1 перемещают вверх ходовые гайки 2 (фиг.6-8), которые из задвинутого положения начинают выдвигаться вместе с грузонесущими полками 22, за-, крепленными на верхних кромках ходовых гаек 2. Перед подъемом грузоне- сущие полки 22, закрепленные к каждой паре колонн и выступающие через сквозную щель а (фиг.5) направляющих 20 опущены в проемы б (фиг.З и 5) роликового конвейера 27 его уровня. В момент подъема при выходе из проемов б грузонесущие полки 22 подхватывают груз 28 и поднимают его на необходимую высоту. Во время подъема направляющие ролики 4 катятся по внутренним поверхностям выдвижных телескопических секций 5, а направляющие ролики 7 начинают вращаться из-за соприкосновения с наружной поверхностью ходовых гаек 2.
Подъем грузонесущих полок 22 продолжается до тех пор, пока несущие кольца 3 упрутся в опорные кольца 6, в этот момент вращение грузовых при4 (
водных ГОП 1 npCKpnilUieTi T и У.ОЦОвые г айки 2 с грузоиесу1 ;ими полками 22 и грузом 28 останал. пшпются Гл(- стояние межд у подняп/: : , иегуы; f.il liOJ K.lMii 2 и не ;.-л:; 1 i-M . длине вьщвииутых ; ;;. ini . i скм. 2, i;,-- cjie укладки следу1о;це1ч.| груза 28 на ро:п{коБый конвейер 27 и после отирав ки его в зону погрузки включается ирИБод и грузовые приводные винты I начинают вращаться и перемещают вверх ходовые гайки 2 с закрепленными на 1ЕИХ грузонесущими полками 22 и гру- зом 28, которые были уже подняты на высоту, равную длине ходовых гаек 2. Ходовые гайки 2 при помощи несузцих колец 3, на которые опираются опорные кольца 6, закрепленные к выдвижной телескопи1Геской секции 5, увлекают их за собой. С этого момента выдвижные телескопические секции 5 из задвинутого положения (фиг.6-8) начинают выдвигаться вместе с грузонесущи- ми полками 22, закрепленными на верхних кромках опорных колец 6. Перед подъемом грузонес тцие полки 22, закрепленные к каждой паре колонн и выступающие через сквозную щель а, на- правляющими 20, опущены в проеме б
роликового конвейера 27 ниже его уро)з- ня. В момент подъема при выходе из проемов б грузонесущие полки 22 под- хт), груз 28 и поднимают его на необходимую высоту. Во время подъема направляющие рлики 9 катятся по пнутрешпш поверхностям выдвижных Tt-.чсгкопических секций 10, а направ- , ролики 12 опорных ко-чец 11 кгггятся по )аружньгм поперхностям выд
нинутих телескопических секций 5.
Подъем продолжается до тех пор, пока иесушие кольца 8 соприкоснутся с опорными кольцами 11, в этот момент вр ииение грузовых приводных винтов 1 прекращается и ходовые гайки 2 ос- гаиавлинаются - подтаем груза прекращается .
Т рузопес пцие полки 22 с грузом 28, закрепленные на кромках верхней
части ходовых гаек 2, находятся на , равной сумме длин ходовых гаек 2 и вьщвижных телескопических
секций 5, а следующий груз, находя- „01
щпися на грузонес тцих полках 22, закрепленных на кромках опорных колец 6 средних выдвижных телескопических секций 5 находится на высоте, равной
длине выдвижных телескопических секций 5.
После укладки очередного груза 28 на роликовый конвейер 27 подъем его производится на высоту, равную длине очередных выдвижных телескопических секций 10. Подъем аналогичен подъему уже выдвинутых ходовых гаек 2 выдвижных телескопических секций 5. Во вре- мя выдвижения наружные направляющие ролики 12 и 14 катятся соответственно по внутренним поверхностям направляющих 20 и вьщвюкных телескопических секций 15. После соприкосновения несущих колец 13 с опорными кольцами 16 подъем прекращается.
Грузонес тдие полки 22 с грузом 28 закрепленные на кромках верхней части ходовых гаек 2, находятся на высо- те, равной сумме ходовых гаек 2 и выдвижных телескопических секций 5 и 10, вторые грузонесущие полки 22 с грузом 28 и поддоном находятся на высоте, равной сумме длин вьщвинутых телескопических секций 5 и 10, третий груз находится на высоте, равной длине выдвртаных телескопических секций 10.
После укладки очередного груза 28 на роликовьц конвейер 27 подъем груза грузонесущими полками 22 производится на высоту, равную длине выдвижных телескопических секций 15. Одновременно на эту же высоту поднимаются грузонесущие полки 22, закрепленные на несущих кольцах 18 выдвинутых телескопических секций 15. Во время подъема направляющие ролики 17 оно: ных колец 16 и направляющие ролпг.. 19 несущих колец 18 катятся ввер-. по внутренним поверхностям направляп-цих 20.
После укладки следующего груза 28 на роликовый конвейер 27 подъем его на последующие грузонесущие полки 22 на высоту, равную длине выдвижных телескопических секций 15, длина которых соответствует расстоянию между роликовыми конвейером и опорными кольцами 18, производи тся аналогично вышеописанному. На этом заканчивается процесс подъема грузов.
Выдача грузов лифтом-накопителем происходит аналогично подъему грузов только в обратном порядке. В начале выгружаются нижние грузонесущие полки 22. Вклзочается привод, грузовые
5
0
5
0
5
0
5
приводные винты 1 начинают вращаться в обратную сторону и опускают ходо-т вые гайки 2 вместе с выдвинутыми телескопическими секциями 5,10 и 15. После того, как грузонесущие полки 22 уложат груз 28 на роликовый конвейер 27 и опустятся ниже уровня роликового конвейера 27, несущие кольца 18 упрутся в фиксирующие кольце- вые опоры 21, и вращение грузовых приводных винтов 1 прекратится. Затем включается роликовый конвейер 27 и груз 28 отравляется в зону выгрузки.
Очередной груз 28 выгружается следующим образом.
Вновь включается привод и грузовые приводные винты 1 опускают ходовые гайки 2 вместе с выдвижными телескопическими секциями 5 и 10. Одновременно происходит задвигание и опускание вьщвижных телескопических секций 10 в вьщвижные телескопические секции 15. После того, как очередные грузонесущие полки 22 уложат груз 28 на роликовый конвейер 27 и опустятся ниже уровня роликового конвейера 27, несущие кольца 13 упрутся , в несущие кольца 18, вращение грузовых приводных винтов 1 прекратится. Включается-роликовый конвейер 27, и груз 28 с поддоном отправляется на выгрузку.
Выгрузка остальных грузонесущ гх полок 22 и задвигание выдвижных телескопических секций 5 и ходовых гаек 2 аналогично вышеописанному.
Таким образом, выдвижные телескопические секции 15,10 и 5 и ходовые гайки 2 находятся в задвинутом состоянии, а грузонесущие полки 22 находятся ниже уровня роликового конвейера 27, т.е. под ним.
Формула Изобретения
Подъемник, содержащий приводные винты с ходовыми гайками, направляющие для винтов, каждая из которых выполнена в пустотелой со сквозными продольными щелями колонны, снабженной фиксирующей кольцевой опорой, на которой расположены насаженные на каждом из винтов верхние, средние и нижние телескопические секции, на каяздой из которых в верхней части установлены опорные, а в нижней части несущие кольца, на которых установлены грузонесущие полки, концы которых пропущены через упомянутые щели колонн, отличающий- с я тем, что, с целью повышения эксплуатационных качеств, он снабжен
„
роликовым конвейером, расположенньп
между колоннами и закрепленным к ним, причем колонны спарены между собой - грузонесущими полками, выполненными в виде брусов, оба конца каждого из
которых жестко закреплены в поперечном направлении на верхней части ходовых гаек, на опорных кольцах средних телескопических секций и на несущих кольцах нижних телсскопичегких секций, при этом роликоиый конисч и р выполнен с поперечными проемами, рам- |ными ширине брусов грузонесущих по- :лок.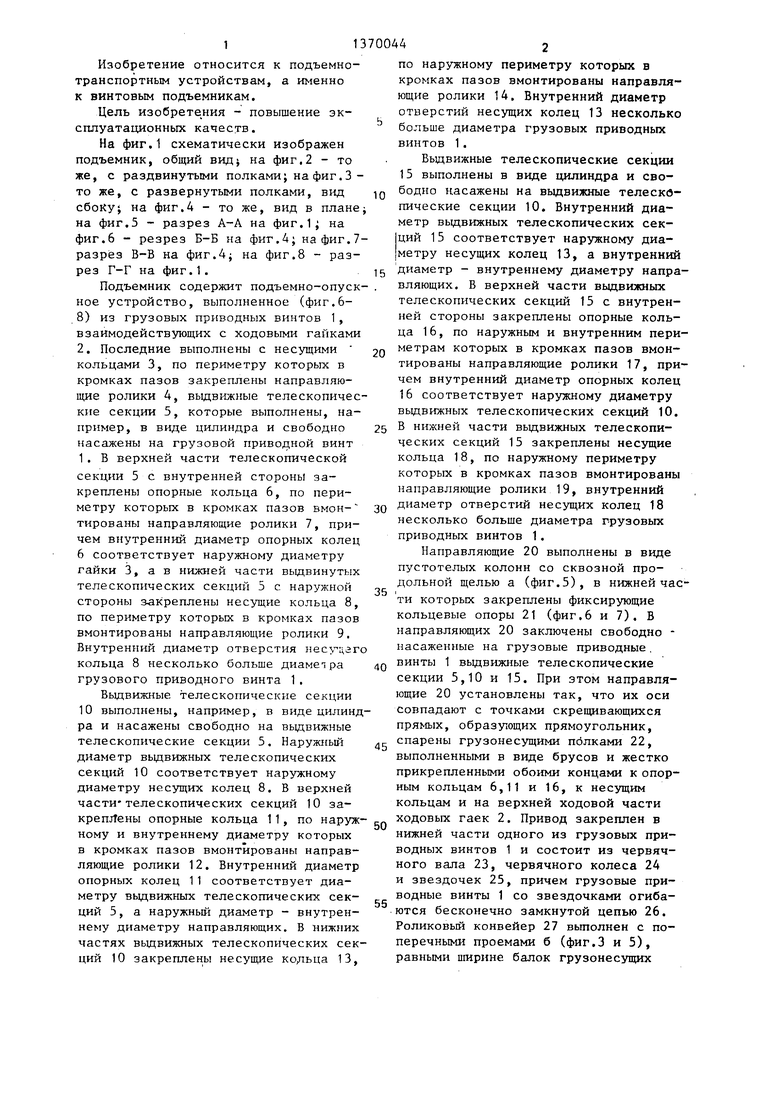
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой подъемник | 1982 |
|
SU1062163A1 |
| Накопитель для штучных грузов | 1986 |
|
SU1409548A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Подвесное устройство для технического обслуживания автомобилей | 1983 |
|
SU1146224A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Конвейер для перегрузки штучных грузов | 1980 |
|
SU918194A1 |
| Телескопический ленточный конвейер | 1977 |
|
SU707857A1 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |



Изобретение относится к подъемно-транспортным устройствам, а именно к винтовым подъемникам. Цель изобретения - повышение эксплуатационных качеств. Подъемник содержит роликовый конвейер 27, который расположен между колоннами 20, прикреплен к ним и выполнен с поперечными проемами, равными ширине балок грузо несущих полок 22. Колонны 22 спарены грузоне- сущими полками 22, проходящими через сквозные щели колонн 20 и выполненными в виде брусов, жестко прикрепленных обоими концами к опорным и несущим кольцам и на верхней части ходовых гаек. Для подъема груза приводные винты 1 перемещают вверх ходовые гайки 2, которые из задвинутого положения начинают вь(двигаться вместе с грузонесущими полками 22, В момент подъема при выходе из проемов грузо- несуцие полки 22 подхватывают груз и поднимают его на необходимую высоту. 8 ил. сл со Н 4: 1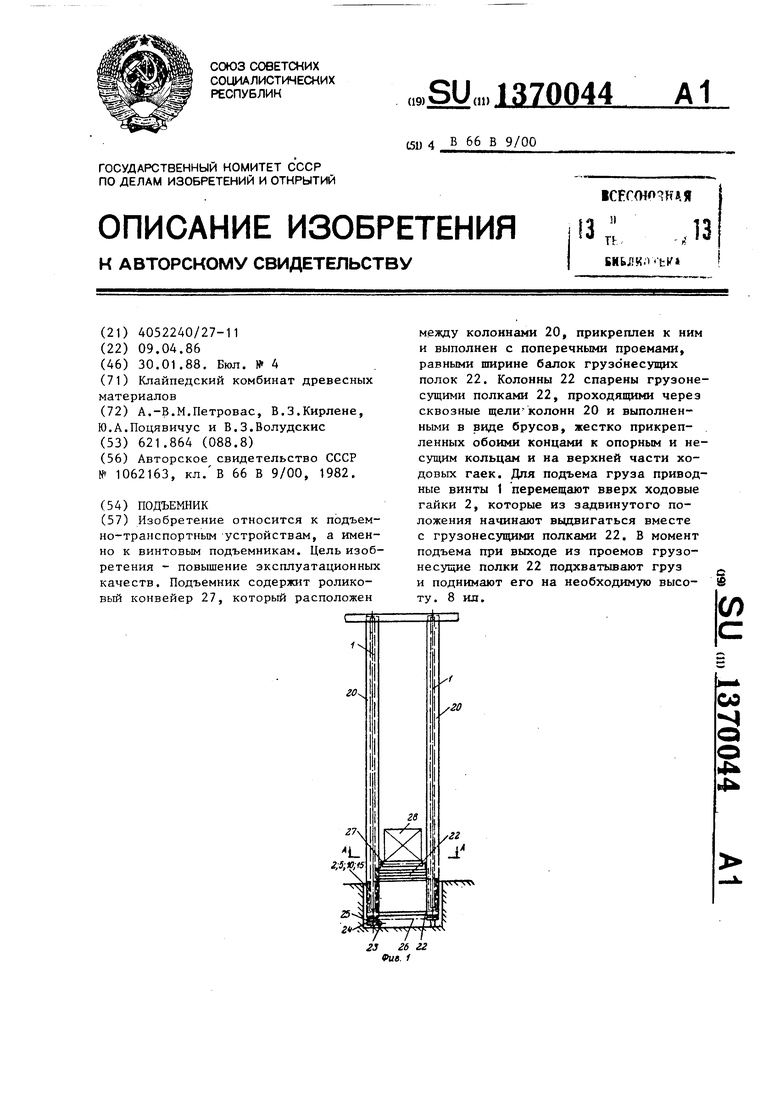
Y7V//////
Риг. 2
Уу / 7// // /
фуг 5
20 2 6
Фи1 5
2 / /y
/ ////// л
6-8
Фиг.7
r-r
5
фиг.В
| Винтовой подъемник | 1982 |
|
SU1062163A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
