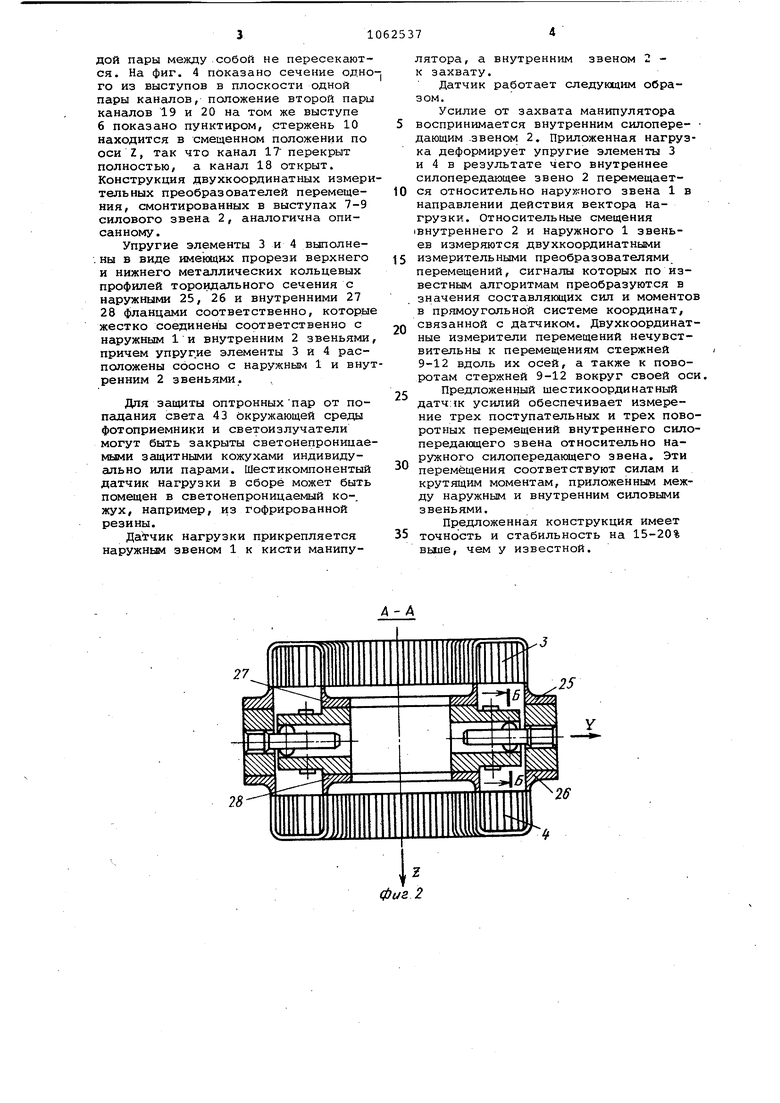
Изобретение относится к приборостроению, предназначено для изме рения составляющих вектора силы и крутящего момента в собственной си теме координат шестикоординатного датчика нагрузки манипулятора и мо жет быть использовано при создании систем управления дистанционных манипуляторов, очувствленных по уси лию, адаптивных промышленных ipo6oтов, Известны шестикомпонентые датчи ки нагрузки манипулятора, содержани наружное и внутреннее силовые звень связанные между собой упругими эле ментами, и измерительные преобразо ватели перемещения нaiэyжнoгo силового звена относительно внутреннего 1. Недостатками таких датчиков нагрузки являются невысокая точность измерения и ограниченный диапазон динамических нагрузок. Наиболее близким по технической сущности к изобретению является дат чик, содержащий наружное и внутрён ,нее силовые звенья, связанные между собой упругими элементами, и двухкоординатные измерительные преобразователи перемещения наружного силового звена относительно внутрённего. Упругие элементы выполнены из эластичного материала типа каучу- ка 2 , Недостатками известного датчика являются невысокие точность и ста(бильнрсть измерений из-за использов ния упругих элементов, выполненных из эластичного материала, который имеет большую величину гистерезиса Невысокая точность измерения определяется также неравномерностью векторного поля жесткости указанного датчика вследствие различия моментов сопротивления упругих элемен тов , выполненньах из эластичного материала данной формы, при приложении нагрузки в различных направле ниях. Целью изобретения является повышение точности за счет исключения влияния гистерезиса. Поставленная цель достигается тем, что в устройстве, содержащем наружное и внутреннее силопередающие звенья, выполненные в виде соос но расположенных полых цилиндров, соединенных упругими элементами, и связанные с силопередающими звень ями оптические двухкоординатные преобразователи их взаимного относительного перемещения, упругие эле менты выполнены в виде двух снабжен ных жесткими фланцами тороидальных оболочек П-рбразного поперечного сечения, в дефррмируемой части.кото рых выполнен сквозные радиальные прорези, причем тороидальные оболочки расположены соосно силопередающим звеньям, с которыми жестко соединены их наружные и внутренние фланцы, и симметрично относительно оптических двухкоординатных преобразователей. На фиг. 1 показан датчик нагрузки манипулятора, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - датчик нагрузки, сечение в плоскости XV; на фиг. 4 - сечение Б-Б на фиг. 2. Шестикс тонентый-датчик нагрузки манипулятора содержит наружное 1 и внутреннее 2 силопередающие звенья, упругие элементы 3 и 4 и оптические двухкоординатные измерительные преобразователи перемещения звена 1 относительно звена 2. Каждый двухкоординатный измеритель перемещения имеет две подвижные части, одна из которых жестко связана со внутренним звеном 2 и выполнена в виде приливов 5-8 на внутреннем звене 2 с установленными в них оптронньми парами, а другая - жестко связана с наружным звеном 1 и выполнена в виде стержней 9-12, в каждом из приливов 5-8 имеются радиальные отверстия 13-16, в которые входят соответствующие стержни 9-12 с возможностью перемещаться в любом направлении. Перпендикулярно каждому радиальному отверстию 13-16 в каждом из приливов 5-8 выполнены две пары каналов 17, 18 и 19, 20, в каждой из которых установлены с одной стороны канала излучатели 21 и 22 света, например светодиоды, а с другой стороны канала - фотоприемники 23 и 24, например фоторезисторы. Каналы 17, 18 и 19, 20 пересекаются с радиальным отверстием 14 так, что стержень 10, размещенный внутри отверстия 14, частично перекрывает сечение обоих каналов соответствующей пары каналов 17, 18 и 19, 20. В исходном состоянии, когда к датчику не приложена нагрузка, перекрытия сечения каждой пары каналов одинаковы, количество света от светоизлучателя к соответствующему фотоприемнику также одинаково в каждом канале рассматриваемой пары, поэтому выходные сигналы этих фотоприемников равны. Фотоприемники включены в мостовую дифференциальную схему. В каждом приливе 5-8 направления осей одной из. пар каналов 19 и 20 ориентированы коллинеарно продольной оси Z внутреннего звена, а оси дру-; гой пары каналов 17 и 18 перпендикулярны осям первой пары каналов и оси отрерстия 14, причем каналы каждой пары между собой не пересекают ся. На фиг. 4 показано сечение одн го из выступов в плоскости одной пары каналов, положение второй пар каналов 19 и 20 на том же выступе б показано пунктиром, стержень 10 находится в смещенном положении по оси Z, так что канал IT перекрыт полностью, а канал 18 открыт. Конструкция двухкоординатных измер тельных преобразователей перемещения, смонтированных в выступах 7-9 силового звена 2, аналогична описанному. Упругие элементы 3 и 4 выполне.ны в виде имеющих прорези верхнего и нижнего металлических кольцевых профилей тороидального сечения с наружными 25, 26 и внутренними 27 28 фланцами соответственно, которы жестко соединены соответственно с наружным 1 и внутренним 2 звеньями причем упругие элементы 3 и 4 расположены соосно с наружным 1 и вну ренним 2 звеньями. Для защиты оптронныхпар от попадания света 43 окружающей среды фотоприемники и светоизлучатели могут быть закрыты светонепроницае мыми защитными кожухами индивидуально или парами. Шестикомпонентый датчик нагрузки в сборе может быть помещен в светонепроницаемый ко-. жух, например, из гофрированной резины. ДаЬгчик нагрузки прикрепляется наружньм звеном 1 к кисти манипулятора, а внутренним звеном 2 к захвату. Датчик работает следующим образом. Усилие от захвата манипулятора воспринимается внутренним силопере- дающим .звеном 2. Приложенная нагрузка деформирует упругие элементы 3 и 4 в результате чего внутреннее силопередающее звено 2 перемещается относительно наружного звена 1 в направлении действия вектора нагрузки. Относительные смещения Внутреннего 2 и наружного 1 звеньев измеряются двухкоординатными измерительными преобразователями перемещений, сигналы которых по известным алгоритмам преобразуются в значения составляющих сил и моментов в прямоугольной системе координат, связанной с датчиком. Двухкоординатные измерители перемещений нечувствительны к перемещениям стержней 9-12 вдоль их осей, а также к поворотам стержней 9-12 вокруг своей оси. Предложенный шестикоординатный датчик усилий обеспечивает измерение трех поступательных и трех поворотных перемещений внутреннего силопередающего звена относительно наружного силопередающего звена. Эти перемещения соответствуют силам и крутящим моментам, приложенным между наружным и внутренним силовыми звеньями. Предложенная конструкция имеет точность и стабильность на 15-20% выше, чем у известной.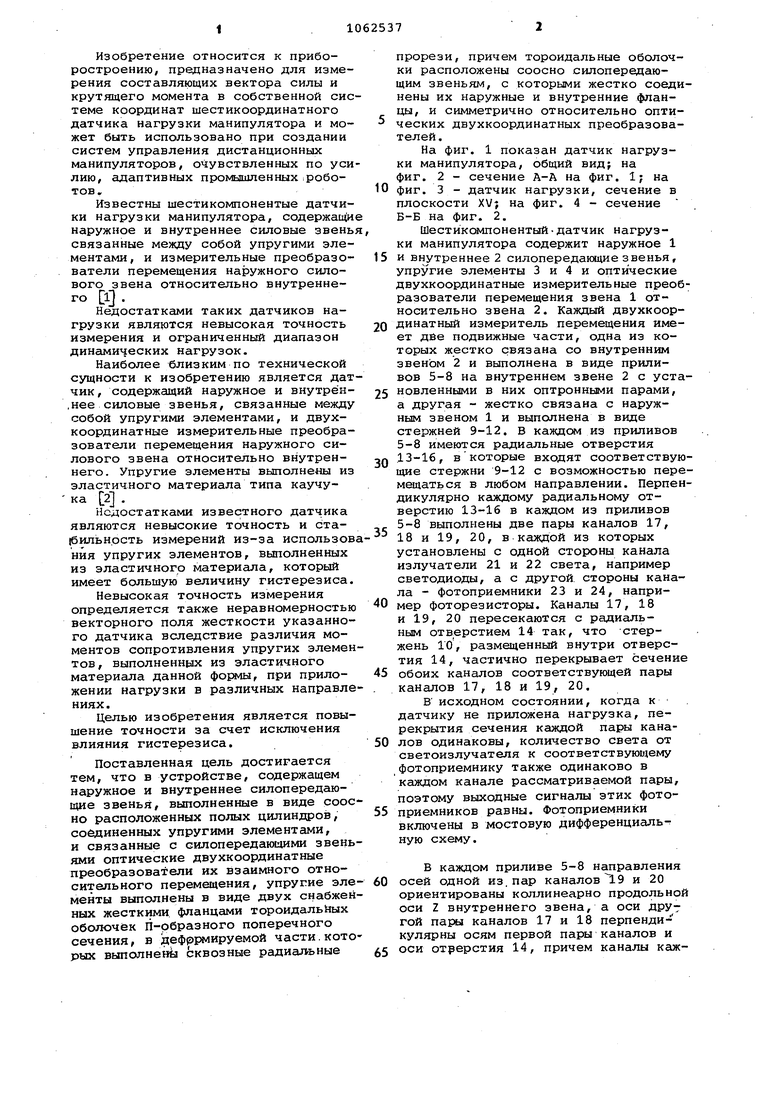
| название | год | авторы | номер документа |
|---|---|---|---|
| Шестикоординатный датчик нагрузки | 1982 |
|
SU1016713A1 |
| Многокомпонентный датчик усилий и моментов | 1982 |
|
SU1045020A1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1996 |
|
RU2102710C1 |
| Измерительная головка | 1986 |
|
SU1409866A1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| Устройство для измерения силы и моментов,приложенных к испытуемому образцу | 1985 |
|
SU1268977A1 |
| Динамометр | 1978 |
|
SU769369A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1997 |
|
RU2113373C1 |
| Емкостный датчик давления | 1988 |
|
SU1696920A1 |
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
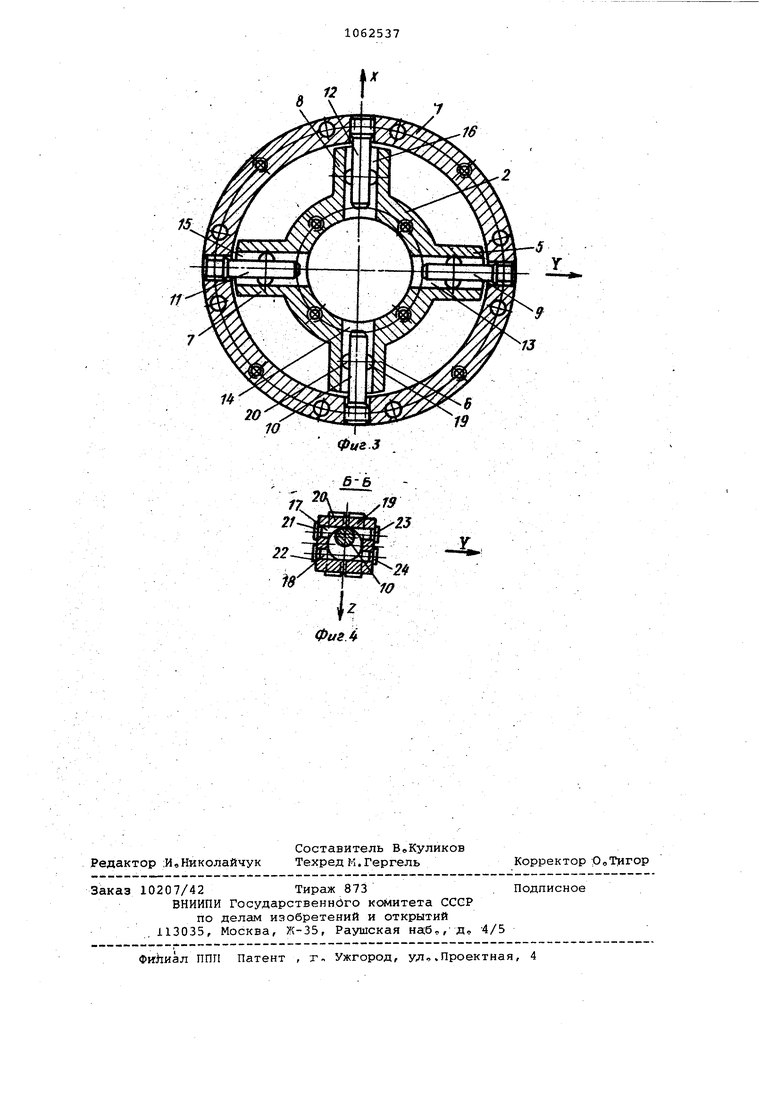
ШЕСТИКОМПОНЕНТЫЙ ДАТЧИК НАГРУЗКИ МАНИПУЛЯТОРА, содержащий ;Наружное и внутреннее сиЛопередающие звенья, выполненные в виде сбосно расположенных полых цилиндров, соединенных упругими элементами, и связанные с силопередающими звеньями оптические двухкоординатные преобразователи их взаимного относительного перемещения, о тл и ча ющ и и с я тем, что, с целью повьшения точности измерения за счет исключения влияния гистерезиса, упругие элементы выполнены в виде двух снабженных жесткими фланцами тороидальных оболочек П-образного поперечного сечения, в деформируемой части которых выполнены сквозные радиальные прорези, причем тороидальные оболочки расположены соосно силопередающим звеньям, с которыми жестко соединены их наружные и внутренние фланцы, и си1«летрично относительно оптических двухкоординатных преобразователей. (Л с 2S
27
j
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очувствленный кистевой суставМАНипуляТОРА | 1979 |
|
SU795940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3921445, | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
