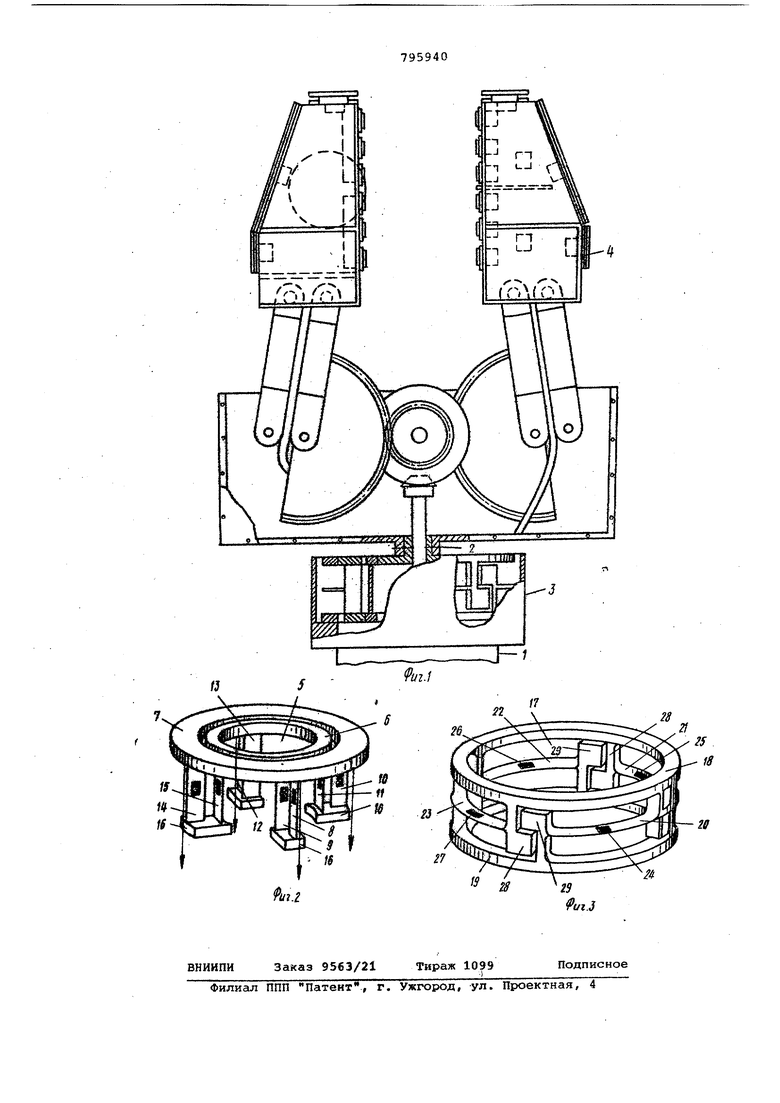
Изобретение относится к машиностроению и может быть использовано в робототехнических устройствах. Известен кистевой сустав манипулятора, содержащий основание, приводы перемещения охвата и устройство очувствления схвата 1 . , Недостатком данного устройства является то, что с устройства Ьчувствления снимается суммарная информация о величинах одновременно нескольких составлякйцих сил и моментов , что требует использования электронных схем для выделения требуем компонентов моментов..Это существенно снижает степень точнос очувств ения и усложняет конструкци кистевого сустава, манипулятора. Цель изобретения - повышение точ ности очувствления и упрощение конструкции. Поставленная цель достигается те что устройство очувствления схвата содержит два информационных блока, первый из которых содержит внутренн фланец с жестко прикрепленным схвато и внутреннее кольцо, соединенное с этим фланцем четырьмя попарно и диаметрально противоположно располо.женными упругими элементами, а второ информационный блок содержит внешнее кольцо, к которому жестко крепитсявнутренее кольцо первого информационного блока, и внешний фланец, связанный с одной стороны с внешним кольцом посредством дополнительных упругих элементов, а с другой стороны - жестко связан с основанием, причем все упругие элементы снабжены измерителями деформаций, а зазор ме;.зду внутренним фланцем и внутренним кольцом первого информацнонногс блока выбирается в пределах допустимых деформаций упругих элементов, и зазор между внешним кольцом н внешним фланцем второго информационного блока выбирается в пределах упругих деформаций дополнительных упругих элементов. На фиг.1 изображен очувствленный кистевой сустав манипулятора; на фиг.2 - информационный блок устройства очувствления; на фиг.З второй информационный блок устройства очувствления. Очувствленный схват манипулятора состоит из основания 1,привода 2 перемещений схвата, устройства 3 очувствления и схвата 4. Первый инфо Змационный блок 5 состоит из внутреннего фланца 6,, к которому жестко крепится схват 4 и внутреннее кольцо 7, соединенное с sHytренним фланцем б четырьмя попарно и диаметрально противоположно расположенными упругими элементами 8 ,,10 и 11, 12 и 13, 14 и 15, каждый из которых состоит из двух взаимно перпендикулярных продольных упругих пластин. Первые пластины в каждой паре (8,10,12 и 14) распеложены по радиусу и связывают внутреннее кольцо 7 с подставками 16. Вторые пластины в каждой паре (9,11 13 и 15) соответственно связывают подставки 16 с внутренним фланцем б Упругие элементы снабжены измерителями деформаций, которые установлены в местах наибольших изгибов. Зазор между внутренним фланцем 6 и внутренним кольцом 7 выбирается 3 пределах допустимых деформаций упругих, элементов первого ин формационного блока 5. Блок 5 предназначен для измерения сил, лежащих в горизонтальной плоскости. Второй информационный блок 17, преднаэнаненный для измерения сил, лежащих в вертикальной плоскости, состоит из внешнего кольца 18, к ко торому жестко крепится внутреннее , кольцо-7 первого информационного бл ка 5, и внешнего фланца 19, связанного с кольцом 18 посредств четырех дополнительных упругих элементов 20-23, на которых посередине установлены измерители деформаций 24-27. Каждый из дополнительных упр шк элемен ов связан с внешним флан цем 15 и внешним кольцом 18 посредством упоров 28 и 29. Упоры 26 соед нены с внешним кольцом 18, а упоры 29 - с внешним фланцем 19. Зазор мейщу каждой парой предохранительны упоров 28 и 29 выбирается в предела допустимых деформаций дополнительны упругих элементов 20-23. Устройство работает следующим об разом. При действии силы, направлениой по одной горизонтальной крордкиатмо оси или, что тоже самое, при действ двух сил в горизонтальной плоскости деформироваться в одинаковом направ лении будут элементы 9,10,13 и 14,н измерителях деформаций которлх появ вятся сигналы одного знака. После суммирования этих сигналов получаем искомую силу, действующую по выбран ной оси. Аналогично первьву информационным блоком определяется сила, действуюмая по другой горизонтально оси. Сила , действующая по вертикаль ой оси определяется вторым инфорационным блоком 17 таким же образом . При действии крутящего момента относительно вертикальной оси деформируются упругие элементы 3,10,12 и 14 первого информационного блока 5, причем элементы 8 и 12, 10 и 14 деформируются в противоположных направлениях. Поэтому величина момента относительно вертикальной оси пропорциональна сигналу,получаемому в результате суммирования сигналов с 8 и 10 упругих элементов и инверсного :уммирования сигналов с 12 и 14 упругих элементов. Аналогично вторым информационным блоком измеряются крутящие моменты относительно горизонтальных осей. Формула изобретения 1.Очувствленный кистевой сустав манипулятора, содержащий основание, приводы перемещения схвата и устройство очувствления схвата,о т личайщийся тем, что, с целью повьчяения степени точности очувствления и упрощения конструкции, устройство очувствления схвата содержит два информационных блока, первый из KOTojaax содержит внутренний фланец с жестко прикрепленным ухватом и внутреннее кольцо,соединенное с этгал фланцем четырьмя попарно и диаметрально противоположно расположенными упругими элементами, а второй информационный блок содержит внешнее кольцо, к которому жесчгко крепится внутреннее кольцсГ первого информационного блока, и , внешний фланец, связанный с одной стороны е внешним кольцом посредство л до1г : лнительных упругих, элементов, а G другой стороны - жестко связан с основанием, причем все упругие элементы снабжены измеритеяя вя деформаций. 2.Сустав по П.1, отличаюtiA и И с я тем, что зазор между внутренмш4 фланцем и внутренним кольцом первого информационного блока выбирается в пределах допустимых деформаций упругих элементов. 3.Сустав по П.1, отличающийся тем, что зазор меящу внешним кольцом и внешним фланцем второго инфор« ационного блока выбирается в пределах упругих г- ормаций дополнительных упругих элементов. Источники информации, принятые во внимание при экспертизе 1. Патент США W 2500143, кл. В 25 J 13/00, 1952.

| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| Силомоментный датчик | 1984 |
|
SU1216680A1 |
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| КИСТЬ МАНИПУЛЯТОРА С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 1999 |
|
RU2153977C1 |
| Многокомпонентный датчик усилий и моментов | 1982 |
|
SU1045020A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308468A1 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308467A1 |