Изобретение относится к устройствам для измерения сил и крутящих моментов, в частности для измерения составляю- . щих вектора силы и крутящего момента в системе координат шестикоординатного датчика нагрузки, и может быть исполйзовано при создании систем управления очувствленных дистанционных манипуляторов, адаптивных промышленных роботов и т.д. .
Известен шестикоординатный датчик нагрузки, содержащий нар, жное и внутреннее силовые звенья, упругую систему в виде крестовины, стержни которой жестко закреплены одним концом во внутреннем силовом звене, и измерители перемещений внутреннего силового звена .относительно наруж-ного LlJ .
Недостатками такого датчика являютс сложность конструтщии, большая зона гистерезиса выходной статическЪй характеристики и низкая надежность.
Наиболее близок предлагаемому по технической сущности шестикоординатный датчик нагрузки, содержащий наружное и внутреннее силовые званья, упругую систему в виде крестовины, стержни которой жестко закреплены одним концом во внутреннем силовом звене, а другим - в упругой направляющей на наружном силовом звене, и измерители перемещений внутреннего силового звена относительно наружного. Упругая система этого датчика нагрузки имеет три упругих стержня, расположенные в плоскости в виде крестовины под углом 120 друг к другу и2
Наличие упругой направляющей в известном датчике нагрузки в виде листовой прямоугольной пружины снижает зону гистерезиса выходной статической характеристики датчика нагрузки за счет устранения трения скольжения в подвижном соединении. Для обеспечения необ- ходимой величины перемещения при заданной, нагрузке требуются большие габариты упругой направляющей, что усложняет конструкцию датчика нагрузки. Перемещения внутреннего силового звена относительно наружного измеряются шестью линей1-1ьшш дифференциальными измерителями перемещений, каждьтй из которых имеет подпр жиненный измерительный штырь, который постояннонаходится в мханическом контакте с измерительной поверхностью внутреннего силового звена. Наличие механического контакта измерительного штыря измерителя перемешения снижает надежность датчика нагрузки, особенно при работе его в среде гидравлической жидкости. Измерение шести координат, характеризуюших относительное линейное перемещение и угловой поворот внутреннего силового звена, с помощью шести отдельньи измерителей перемешени усложняет конструкцию внутреннего и наружного силовых звеньев.
Цель изобретения - повышение надежности шестикоординатного датчика нагрузки путем исключения механических контактов.
Поставленная цель достигается тем, что в щертикоординатном датчике нагрузки, содержащем наружное и внутренее силовые звенья, упругую систему в виде крестов1 ны,-стержни которой жестко закреплены одним концом на внутреннем силовом звене, а другим - в упругой направляющей, установленной на наружном силовом звене, и измерители перемещений внутреннего силового звена огнрсительно наружного, каждый измеритель перемещения вьшолнен в виде втуптки из магнитомягкого материала, жестко связанной с внутренним силовым звеном и коаксиально охватыв.аюшей стержень упругой системы, и статора, закрепленного на наружном силовом звене и имеющего две взаимно перпендикулярные пары диаметрально расположенных катушек индуктивности, симметричных относительно втулки, причем магнитоприводы катушек индуктивности обращены своим зазором в сторону втулки.
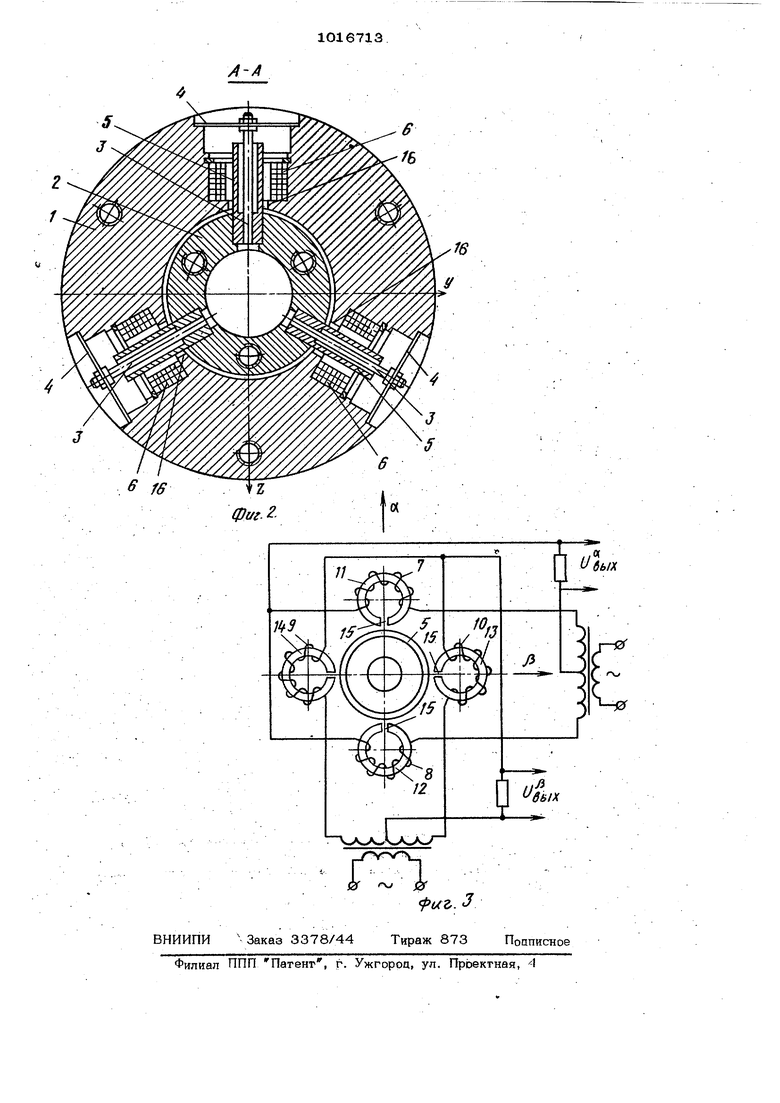
На фиг. 1 показан шестикоординатный датчикнагрузки,общий вид; нафиг.2 - сечение А-Анафиг. 1; на фиг. 3 - принципиальная схема двухкоординатного измерителя перемещений.
Шестикоординатный датчик нагрузки состоит из наружного силового звена 1, являющегося корпусом датчика., внутреннего силового звена 2, упругой силовой системы в виде крестовины, стержни 3 которой жестко закреплены одним концом во внутреннем силовом звене 2, а другим - в упругих направляющих 4, и трех двухкоординатных индуктивных дифференциальных измерителей перемеще ния, каждый из которых содержит жестко связанную с внутренним- силовым 2 втулку 5 из магнитомягкого материала, внутри которой коаксиально установлен стержень 3 упругой системы, и статор 6, имеющий две взаимно перпендикулярные пары диаметрально расположенных катушек 7, 8 и 9, 10 индуктивности на магнитопроводах 11, 12 и 13, 14 обращенных своим зазором 15 Б сторону втулки 5. Магнигопроводы 11-14 выполнены в виде П- или Ог образного тсердечника с зазором. Линия зазора может быть как параллельной центральной оси статора, так и под углом к ней. Кольцевые выступы 16 в наружном силовом звене 1 служат упорами-ограничителями, которые при перегрузках датчика ограничивают упругие перемещения стерэкней 3 прт срп|эикосноваши со втулками 5. Зазор между втулками 5 и кольцевыми выступами 16 выбирается в пред лах упругих деформаций стержней 3. Каждый из трех двухкоординатных диф. ференциальньк индуктивных измерителей перемещения измеряет вектор перемещения, пропорциональный упругой деформации стержней 3 в плоскости измерения, пропорционально приложенной нагрузке в этой же плоскости. Плоскость измерения соответствует плоскости расположения двух пар катушек 7,8 и 9,1О индуктивности. Упругие направляющие 4 выполнены в форме круглой плоской пружины с прорезями в виде дуг 17, расходящихся от центра спирали. Такая форма упругой ааправляюшей 4 обеспечивает большой ход стержня в направлении, перпендикулярном ее плоскости (малую жесткость), и отсут ствие перемещений в плоскости упругой направлякяпей (большую жесткость). Благ даря этому свойству использованной упругой направляющей стержни 3 упругой системы разгружены от продольных нагрузок и работают только на изгиб, обеспечивая .необходимое перемещение внутреннего сииово о звена 2 относительно наружного силового звена 1, что позволяет получить, высокий уровень выходных сигналов двухкоординатных деференциальных индук|тивных измерителей перемещения. Предлагаемый датчик работает следую щим образом. В исходном состоянии, когда нагрузка не приложена ко внутреннему силовому звену 2 относительно наружного 1, стерж ни 3 упругой системы находятся в свобод ном состоянии. Расположение втулок 5 от носительно статоров 6 коаксиальное, поэтому сопротивление магнитной цепи и, соответственно, индуктивность каждой из четырех катушек 7-10 одинаковы. Магнитная цепь каждой катушки замыкается через зазоро15 в магнитолроводе и через зазоры, образованные магнитопроводом со втулкой. При прилЪжении нагрузки к внутрен|нему силовому звену 2 происходит yripyая деформация стержней, поэтому cooiv етствукшие втулки 5 перемешаются относительно соответствующих статоров , при этом изменяется длина зазора агнитопровод-втулка, что приводит к дифференциальному изменению индуктивности диаметрально расположенных катушек. Осями чувствительности каждого двухкоординатного измерителя п емеще« являются направления, совпадакщие с осями диаметрально расположенных кат5шек 7 - Ю. К перемещениям втулки 5 вдоль и вокруг своей оси двухкоординатный измеритель перемещений нечувствителен ввиду симметрии втулки 5. При смещении втулки 5 в любом направлении в плоскости, проходящей через оси чувствительности , выходные сигналы измерителя перемеще шй пропорциональны составляющим вектора перемещения по осям чувс твительности. Формирование сигналов, пропорштональных пepeмeщeшlям производится известными способами с помощью мостовых схем. Диаметрально расположенные кагушки 7-10 образуют, два полумоста, которые включе11ы в мостовые схемы с источником питания переменного тока. Формирование составлякштих вектора усилия н крутящего момента из сигналов, пропорциональных перемешениям внутреннего силового звена 2 относительно наружного и измеренных измерителями перемещений, вьшолняется известным способом. образом, предлагаемый шестикоординатный датчик усилий обеспечивает измерение трех поступательных и трех поворотных перемещений внутреннего силового звена относительно наружного, которые соответствуют усилиям и крутящим моментам, приложенным к внутреннему силовому звену. Упрощение конструкции шестикоордннатнрго датчика нагрузки обеспечено применением двухкоординатных диф(1)еренциальных измерителей перемещений предлагаемой конструкции и вьшолнением упругих направляющих в форме круглой плоской пружины с прорезями в виде дуг, расходящихся от центра по спирали. Кроме того, коаксиальное располо.жение элементов упругой и измеритальной систем обеспечивает технологичность констр}1шии что упрощает изготовление и регушфовку шесуикоординатного датчика нагрузки. Повышение надежности обеспечтгвается применением средств изNiepemiH перемещений без механических контактов.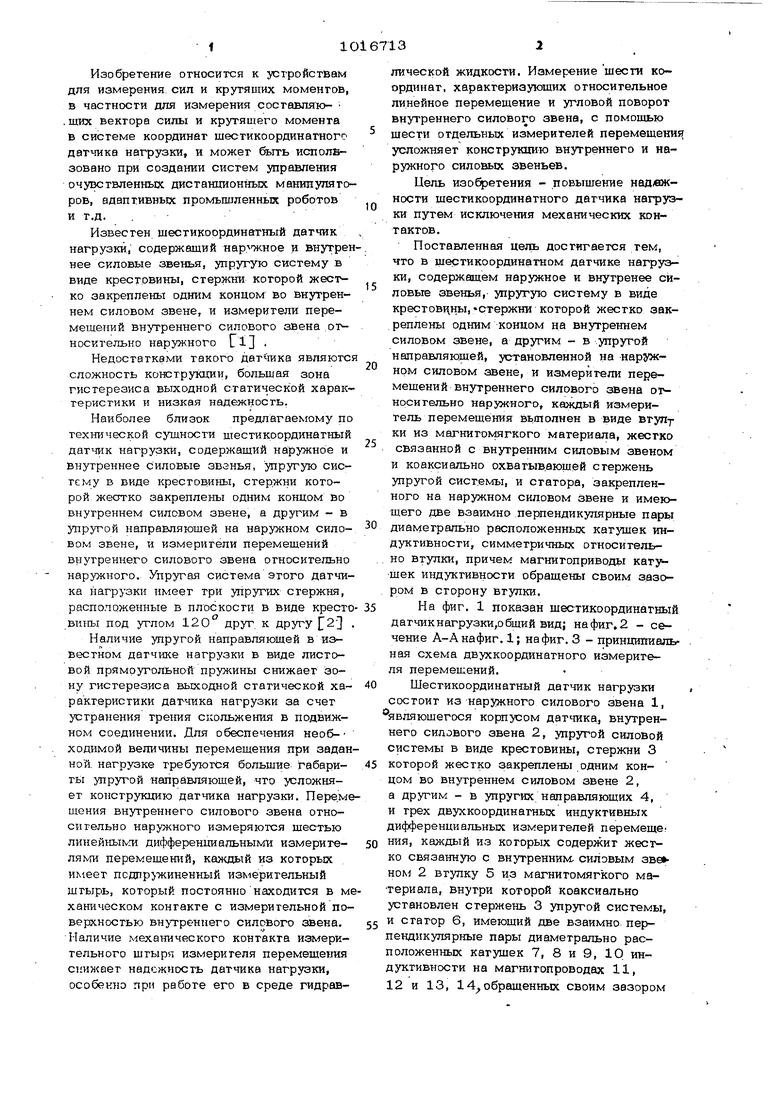
| название | год | авторы | номер документа |
|---|---|---|---|
| Шестикомпонентный датчик нагрузки манипулятора | 1983 |
|
SU1062537A1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 1994 |
|
RU2091971C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1670377A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
ШЕСТИКООРДИНАТНЫЙ ДАТЧИи НАГРУЗКИ содержащий наружное и внутреннее силовые звенья, упругую систему в виде крестЬвины, стержни котсь рой жестко закреплены одним концом на внутреннем силовом эвене, а другим в упругой направляющей, 5становленной на наружном силовом звене, и измерители перемещений внутреннего силового звена относительно наружного, о т л и чающийся тем, что, с целью по- вышения надежности работы датчика путем исключения мехащческих контактов, каждый измеритель перемещения выполнен в виде втулки из магнитомягкого ма териала, жестко связанной с внутренним силовым звеном и коаксиально охватывающей стержень упругой системы, и статора закрепленного I на наружном силовом звене и имекшего две взаимно- перпендикулярные пары диаметрально расположенных катушек индуктивности, симметричных относительно втулки, причем магнитопрово ды катущек индуктивности офащены своим зазором в сторону втулки. СО 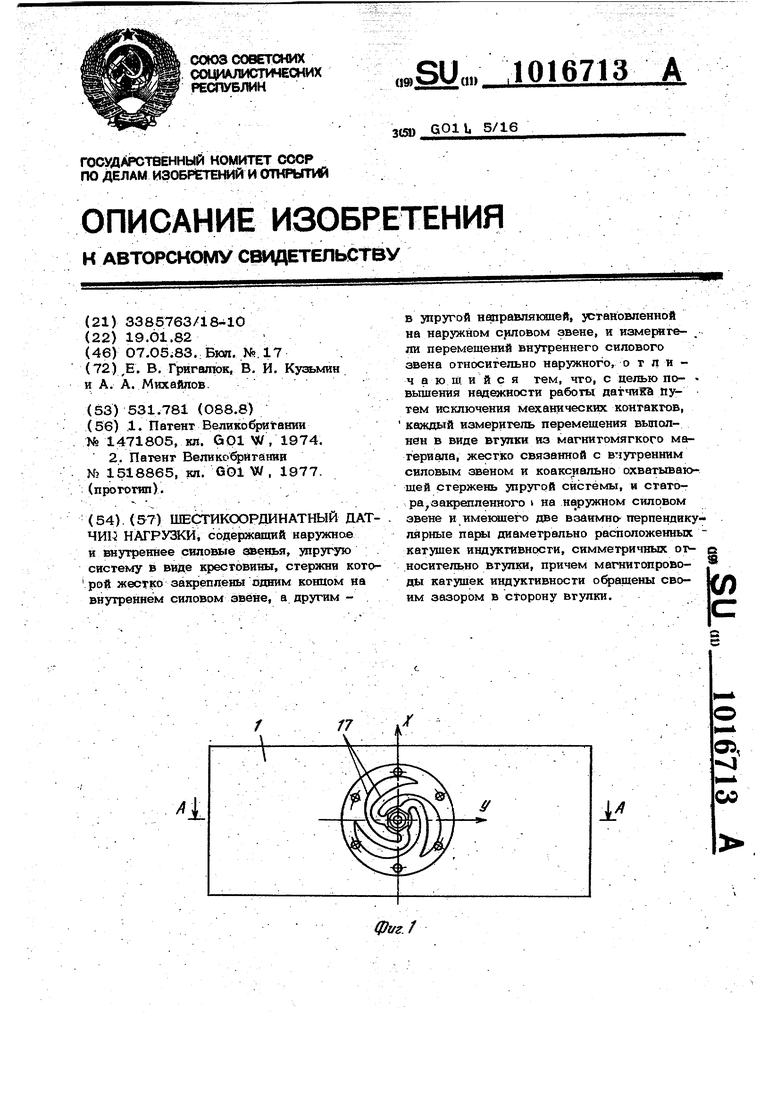
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобригании №1471805, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой синтезатор частот | 1988 |
|
SU1518865A2 |
| Obi W , 1977 | |||
| (прототип). | |||
