2. Устройство ПОП.1, отличающееся тем, что, с целью повышения удобства задания доз, . сверху и снизу относительно конца одного из измерительных рычагов на подвижной рамке шарнирно установлены вспомогательные рычаги, контактирующие одним плечом с измерительным рычагом а другим плечом с односторонним ограничителем, причем на этих рычагах расположены гири-допуски с возможностью их перемещения и фиксации на плечах. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Судовые весы | 1984 |
|
SU1204947A1 |
| Рычажные весы | 1979 |
|
SU832347A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| Устройство для взвешивания груза на судах | 1978 |
|
SU763692A1 |
| Контрольно-весовое устройство для отбраковки штучных грузов | 1979 |
|
SU859826A1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |
| Весы для взвешивания животных | 1989 |
|
SU1765714A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
1. СУДОВОЕ ВЕСОВОЕ УСТРОЙСТВО, содержащее грузОприемную платформу, смонтированную на подвижной b вертикальной плоскости ра ке, расположенные в контуре рамки соединенные серьгой два иэмеритель 8/7 13 10 S 19 y//////////t f //// / /{ I I IS /« ных рычага, установленные средними шарнирами на неподвижные стойки, и отсчетный механизм, отличающееся тем, что, с :целью повышения производительности процесса взвешивания и расширения диапазона измерения массы в условиях качки, в него введены гиревые брусьяс опорными роликами, а измерительные рычаги соединены малыми плечами с подвижной рамкой, большими - с гиревыми брусьями, лежащими на опорных роликах, обоймы которых установлены с возможностью их перемещения во встречно-противоположных направлениях, при этом обоймы соединены с гайками кинематически связанных посредством шестерен виНтов, на конце одного из которых установлен отсчетный механизм. 27 Л/ S 31 25 26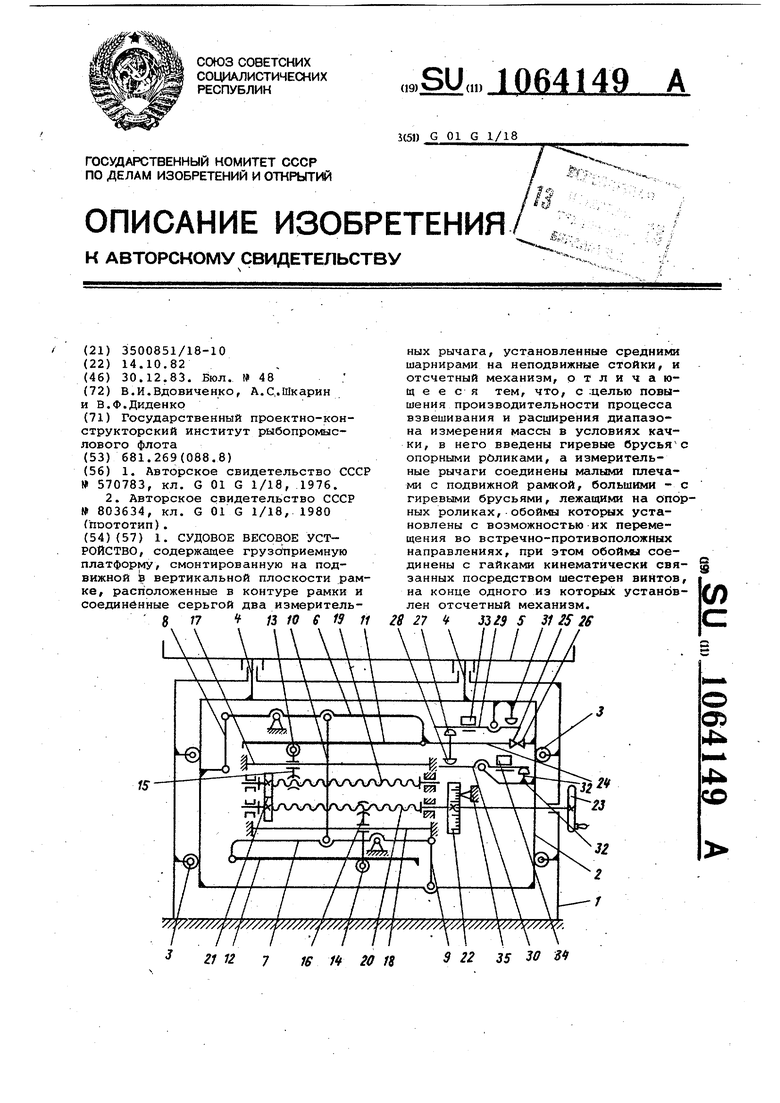
Изобретение относится к весоизмерительной технике, а точнее к устройствам для взвешивания массы в условиях качки, и может быть использовано на морских судах, а также в вагонах-ресторанах и других подвижных транспортных средствах.
Известны весовые судовые устройства с двумя измерительными рычажными системами, взаимно компенсирующими влияние качки судна. Дйя них характерно, что о величине измеряемой массы судят по величине отклонения рычажной системы от начального положения по массе гирь, уравновешивающих груз, либо по обои факторам одновременно. Эти судовые весовые устройства позволяют производить взвешивание в условиях качки l .
Однако указанные устройства затрудняют применение призменных опор имеющих малые сопротивления, а уравновешивание взвешиваемой массы набором гирь требует больших затрат времени. Кроме того, при больших от клонениях даже наиболее простые механизмы обладают нелинейными характеристиками.
Наиболее близкими к предлагаемым по технической сущности являются ве сы для взвешивания на судах, содержащие грузоприемную платформу, смонтированную на подвижной и вертикальной плоскости рамке, расположенные в контуре рамки и соединенные серьгой два измерительных рычага, установленных средними шарнирами на неподвижные стойки, и отсчетный механизм 2 .
Недостатками известных весбвявляются низкая производительность процесса взвешивания и невозможность расширения диапазона измерения массы из-за роста влияния качки на точность измерения.
Цель изобретения - повышение производительности процесса взвешивания, расширение диапазона измерения в усл овиях качки и повышение удобства задания доз.
Указанная цель достигается тем, что в судовое весовое устройство введены гиревые брусья с Опорными роликами, а измерительные рычаги шарнирно соединены малыми плечами с подвижной рамкой, большими - с гиревыми брусьями, лежащими на опорных роликах, обоймы которых уста;новлены с возможностью их перемещения во встречно-противоположном направлениях, при этом обоймы соединены с гайками кинематически связанных посредствен шестерен винтов, на конце одного из которых установлен отсчетный механизм.
Сверху и снизу относительно конца одного из измерительных рычагов на подвижной рамке шарнирно установлены вспомогательные рычаги, контактирующие одним плечом с измерительным рычагом, а другим плечом с однойторонним ограничителем, причем на этих рычагах расположены гиридопуски с возможностью их перемещения и фиксации на плечах.
На чертеже представлена кинематическая схема судового весового уст ройства.
Устройство включает корпус 1, внутри которого расположена рамка 2 с возможностью вертикального перемещения по направляквдим роликам 3, прикрепленным к корпусу 1. На подвижной рамке 2 посредством стоек 4 жестко прикреплена грузоприемная платформа 5. В контуре подвижной рамки 2 один над другим расположены два идентичных измерительных рычага б и 7. Малые плечи измерительных рычагов 6 и 7с Противоположной ориентацией через тяги 8 и 9 шарнирно соединены с подвижной рамкой 2. Большие плечи измерительных рычагов б и 7 соединены между собой серьгой 10, шарниры которой находятся на одинаковом расстоянии от неподвижных опор рычагов 6 и 7. На концах больших плеч рычагов 6 и 7 также имеются шарниры, к каждому из которых присоединены гиревые брусья 11 и 12, поддерживаемые в близком к горизонтальному положению роликами 13 и 14. Оси роликов установлены на передвижных обоймах 15 и 16, соединенных поступательными кинематическими парами с неподвижными направляющими 17 и 18 и винтовыми кинематическими парами с винтами 19 и 20, кинематически связанньзми между собой зубчатой парой 21 наружного зацепления. Один из винтов, например 20, несет на себе отсчетный механизм 22, выполненный в диска, и маховичок 23. -Один из измерительных рычагов б и 7, например 6, имеет на большом плече кронште.йн 24 с прикрепленным подвижным указателем 25 индикатора положения рычага, а на подвижной рамке 2 установлен неподвижный указатель 26.
Индикатор может иметь, три положения с условныкш названиями Недовес, когда указатель 25 ниже указателя 26; Норма, когда указатель 25 и 26 совпадают и Перевес - указатель 25 выше указателя 2. Кронштейн -24 имеет два толка теля: верхний 27 и нижний 28, контактирующие со вспомогательными . верхними и нижними рычагами 29 и 30 установленными на кронштейнах подвижной рамки 2. Свободный поворот верхнего вспомогательного рычага 2 ограничен в направлении против часовой стрелки упором 31, а нижнего вспомогательного рычага 30 - по часовой стрелке упором 32. На вспомогательньлх рычагах 29 и 30 установлены с возможностью перемещения грузы-допуски 33 и 34. Для отсчета массы измеряемого груза служит указатель 35, закрепленный на корпусе. 1.
Устройство работает следующим образом.
Измеряемая нагрузка воспринимает ся грузоприемной платформой 5, через стойки 4 передается на рамку 2, перемещающуюся относительно корпуса 1 между роликами 3, и уравновешивается на рычагах 6 и 7, соединенных серьгой 10, гиревыми брусьями 11 и 12, опирающимися одним концом .на ролики 13 и 14 с обоймами 15 и 16.
При отсутствии груза на платформе 5 момент, создаваемый гиревыми брусьями 11 и 12 относительно роликов 13 и 14, передает на длинные .плечи измерительных рычагов 6 и 7 усилия, поворачивающие соответственно рычаг 6 по часовой .стрелке и против часовой стрелки рычаг 7. Через тяги 8 и 9 рычаги 6 и 7 поднимают подвижную рамку 2с грузоприемной платформой 5 в верхнее кранее положение, определяемое величиной зазора между корпусом 1 и
подвижной рамкой 2 или специальными ограничителями хода (не показаны). При этом указатель 25 на кронштейне 24 и указатель 26 индикатора показывают Недовес и вспомогательный рычаг 30 повернут против часово стрелки, опираясь на упор 32, не касаясь упора 28. Вспомогательный рычаг 29 прижат плечом к упору 31, а между толкателем 27 и вспомогательным рычагом 29 имеется зазор.
Если в исходном состоянии указатель 35 показывает величину Q, то после наложения груза Q возможны три случая; р С,(. В. первом случае подвижный и неподвижный указатели 25 и 26 индикатора сойдутся, что свидетельствует о равенстве , во втором случае для определения неизвестной массы маховичок 23 необходимо вращать в направлении, при котором ролики 13 и 14 будут расходиться, скользя по направлякмцим 17 и 18 с помощью винтов 19 и 20, связанный .зубчатой парой 21. Вращение маховика 23 необходимо продолжать до момента схожДения указателей 25 и 26 индикатора после чего снять отсчет против указателя 35.-В случаеQ О маховичок вращают так, чтобы ролики 13 и 14 сходились и по сигналу подвижного и неподвижного указателей 25 и 26 индикатора Норма снимают отсчет напротив указателя 35 с дискового отсчетного устройства 22.
Во всех перечисленных .случаях погрешность измерения не выходит за пределы, определенные величиной и положением грузов-допусков 33 и 34.
При необходимости дозирования продуктов задаваемая доза устанавливается вращением маховика 23 до совмещения нужной отметки на отсчетном устройстве. 22 с указателем 35. Затем устанавливаются грузыдопуски 33 И 34 В положение, соответствующее желаемому допуску. Величина допуска растет при перемещении грузов-допусков 33 и 34 от центра шарниров вспомогательных рычагов 29 и 30. Ассиметричный допуск устанавливается различным смешением грузов 33 и 34 от центральных шарниров вспомогательных рычагов 29 и 30..Груз 33 ограничивает величину Перевеса, груз 34 - -недовеса. Поле выполнения указанных операций груз на платформе увеличивается или уменьшается до момента показания индикатором Норма. При этом на платформе окажется требуемая доза
с отклонением от номинала в предела установленных грузами-допусками 33
и 34.
Нечувствительность (в пределах допускаемой погрешности) к дейат вию
наклонов и ускорений при работе устройства на качающемся основании обусловлена тем, что в схеме весового устройства использованы две идентичных рычажных системы, соединенные между собой так, что при действии возмук5ающих факторов одного знака погрешности внocи & e К 1Ждой из двух указанных систем имеют
равную величину и противоположные знаки.
Предлагаемое судовое весовое устройство позволяет повысить производительность процесса взвешивания и расширить диапазон измерения массы в условиях качки, а также обеспечить повышение удобства задания доз при дозировании.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Весы рычажные | 1976 |
|
SU570783A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
