Изобретение относится к весоизмерительной технике, преднаэначешгой для гомерения массы на судах в условиях качкн, но може быть применено для взвешивания на других подвиж ных объектах. Известны устройства для взвешивания на судах, в которых измеряемую массу и гири располагают по возможности ближе друг к другу 1 . Такое расположение взвешиваемого груза и гирь снижает динамические погрешности, связанные с влиянием различных по величине ускорений, но не устраняет эти погрешности полностью. Наиболее близким по технической сущности к изобретению является устройство для взвешивания грузов на судах, содержащее станину на которой через силоизмерители, например, тензодатчики, подключенные к регистрирующему прибору, установлены бункер, имеющий горизонтальную опорную площадку, и гиревая платформа с гирями, расположенная на одной вертикальной оси с бункером 2. В этом устройстве динамическая ои1ибка взвешивания не может быть меньше некоторой величины, определяемой минимальным достигнутым расстоянием между центрами масс взвешиваемого груза и гирь. Пелью изобретения является повышение точности взвешивания. Эта цель достигается тем, что к бункеру жестко присоединен стержнями балластный груз, центр тяжести которого расположен на одной вертикальной оси с бункером, а стержни соединены с горизонтальной опорной площадкой, установленной на силоизмерителях с возможностью перемещения и фиксации на площадке относительно гиревой платформы причем на бункере жестко закреплена шкала, градуированная соответственно совпадению центров тяжести бункера, балластного груза и гиревой платформы при разных заданных озах груза, а стрелочный указатель закреплен на горизонтальной опорной плошадке. На чертеже схематично г изображено устройство.
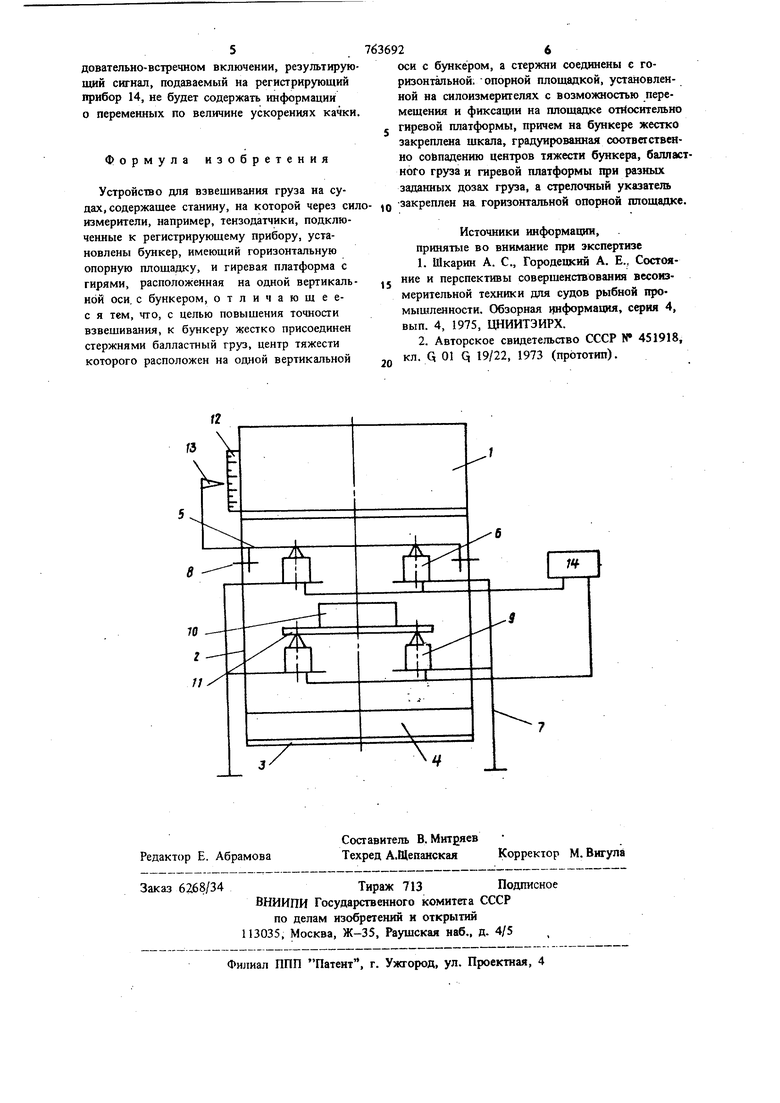
Оно содержит бункер 1, жестко соединенны стержнями 2 с основанием 3, на котором расположен балластный груз 4. Если устройство для взвешивания имеет бункер 1 с механизированной выгрузкой, то в качестве балластного груза могут быть использованы узлы и детали привода (на чертеже не показаны) выгрузки продукта из бункера 1.
Горизонтальная опорная площадка 5 установлена на силоизмерителях 6, например, гензодатчиках, расположенных на станине 7. СтерЖ ни 2, соединяющие бункер 1 и основание 3, зафиксированы на горйзсжтальной опорной площадке 5 фиксаторами 8 (например, штырями). На станине 7 смонтированы силоизмерители 9, воспринимающие нагрузки от гирь 10, установленных на гиревой платформе 11. Бункер 1 со взвешиваемым грузом, стержни 2, основание 3, балластный груз 4, горизонтальная площадка и все вспомогательные элементы, неподвижно связанные с перечисленными частями, образуют подвижную относительно основания 7 систему масс, которые во время взвешивания не изменяют взаимного расположения. 3ta система масс называется в дальнейшем грузоприемным устройством. Центр масс, грузоприемного устройства с грузом для каждой величины взвешиваемого груза, равномерно распределенного в бункере, являетс строго фиксированной точкой.
Гири 10.и гиревая платформа 11 образуют со всеми неподвижно связанными с ними вспомогательными устройствами вторую подвижную относительно основания 7 систему масс, не изменяющих во время взвешивания взаимного расположения. Эта система называется в дальнейщем системой урановешиваюших масс. Центр масс системы зфавновешивающих масс тоже является фиксированной точкой для каждого из устанавливаемых .наборов гирь при условии, что каждая из гирь фиксируется на платформе всегда в одном положении. Точность измерения достигается путем совмещения центров масс грузоприемного устройства и системы уравновешивающих масс Для установки взаимного положения двух систем, соответствующей совмещению их центров масс при различных величинах взвешиваемых грузов, с бункером 1 неподвижно связана шкала 12, а на горизонтальной площадке 5 усгановлен стрелочный указатель 13. Для отсчета величины взвешиваемого груза устройство снабжено регистрирующим прибором 14, который соединен с системами силоизмерителей 6 и 9. -Каждая из систем снлоизмерителей состоит из одного или нескольких силоизмернтельных злементов, соединенных между собой так (например, последовательно соединенные тензодатчнки), чтб общий сигнал системы пропорционален полному весу груза для системы силоизмерителей 6 и полному весу гирь для системы силоизмерителей 9.
Система силоизмерителей 6 -соединена с системой силоизмерителей 9, например, последовательно- встречно.
Градуировка шкалы 12 осуществляется следующим образом.
Весь диапазон взвешиваемых масс разбивается на ряд интервалов и в бункер 1 последовательно помещаются грузы, соответствующие среднему значению интервалов.
Например, если устройство предназначено для взвешивания грузов от 8 до 16 кг, то диапазон взвещивания может быть разбит на 4 интервала со средними значениями 9, 11, 13 15 кг. Количество интервалов определяется требуемой точностью измерений. Грузы, равные .каждому из средних значений, последовательно помещаются в бункер 1, уравновешиваются соответствующим набором гирь, затем устанавливается и отмечается на деталях положение центров масс грузоприемного устройства и системь уравновешиваюших масс, производится совмещение указанных центров масс и фиксирование грузоприемного устройства относительно площадки 5 с помощью фиксатора 8, после чего положение указателя 13 отмечается на шкале щтрихом с цифровой отметкой, равной величине груза, помешенного в бункере.
Леред взвешиванием грузов фиксаторы 8 освобождают и устанавливают указатель 13 против отметки, соответствующей ожидаемой массе взвешиваемого груза. Так, перед замора живанием рыбы на судах в противень помещают обычно JO кг рыбы, и указатель 13 устанавливается против отметки 10. В этом положении грузоприемное устройство фиксируется фиксаторами 8, на платформу 11 накладываются гири 10 необходимой массы, после чего производится взвешивание. В бункер 1 подается взвешиваемый продукт, вес которого и силы инерции от ускорений качки передаются через горизонтальную площадку 5 на систему силоизмерителей 6, вырабатывающих сигнал, пропорциональный произведению массы груза на сумму ускорений силы тяжести и качки. Аналогично гири 10, воздействуя на систему силоюмерителей 9, вырабатывают сигнал, пропорциональный массе гирь, умноженной на сумму ускорений силы тяжести и качки. Так как центры тяжести грузоприемного устройства с грузом и системы уравновешиваемых грузов совмещены путем установки указателя 13 против соответствующей отметки на шкале 12, то величины ускорений качкн, действующих на обе системы, одинаковы, и, следовательно, при соответствующей обработке двух сигналов, например при последовательно-встречном включении, результирую щий сигнал, подаваемый на регистрирующий прибор 14, не будет содержать информации о переменных по величине ускорениях качки Формула изобретения Устройство для взвещивания груза на судах, содержащее станину, на которой через сн измерители, например, тензодатчики, подключенные к регистрирующему прибору, установлены бункер, имеющий горизонтальную опорную площадку, и гиревая платформа с гирями, расположенная на одной вертикальной оси. с бункером, отличающеес я тем, что, с целью повыщения точности взвешивания, к бункеру жестко присоединен стержнями балластный груз, центр тяжести которого расположен на одной вертикальной 26 оси с бункером, а стержни соединены е горизонтальной, опорной площадкой, установленной на силоизмеригелях с возможностью перемещения и фиксации на площадке относительно гиревой платформы, причем на бункере жестко закреплена шкала, градуированная соответственно соЬпадению центров тяжести бункера, балластного груза и гиревой платформы при разных заданных дозах груза, а стрелочный указатель закреплен на горизонтальной опорной площадке, Источники информации, принятые во внимание при экспертизе 1.Шкарин А. С., Городецкий А. Е., Состояние и перспективы соверщенствования весоизмерительной техники для судов рыбной промышленности. Обзорная информация, серия 4, вып. 4, 1975, ЦНИИТЭИРХ. 2.Авторское свидетельство СССР N 451918, кл. Q 01 q 19/22, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Судовое весовое устройство | 1982 |
|
SU1064149A1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |
| Рычажные весы | 1981 |
|
SU1015257A1 |
| Весы квадрантные | 1978 |
|
SU881533A1 |
| Рычажные весы | 1979 |
|
SU832347A1 |
| Весы рычажные | 1976 |
|
SU570783A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ГРУЗА НА КОРАБЛЯХ | 1973 |
|
SU392347A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2007 |
|
RU2343427C1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |
J
V
Zu
:
т
L.
г 11
