2, Весы по п.1, отличающие с я тем, что рычаги выполнены равноплечими, а их опоры смещены по горизонтали, причем оба плеча одного-из рычагов снабжены роли,ками, связывающими его с груэоп.риемной и гиревой платформами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания груза на судах | 1978 |
|
SU763692A1 |
| Судовое весовое устройство | 1982 |
|
SU1064149A1 |
| Рычажные весы | 1979 |
|
SU832347A1 |
| Рычажные весы | 1981 |
|
SU1015257A1 |
| Весы рычажные | 1976 |
|
SU570783A1 |
| Судовые весы | 1984 |
|
SU1204947A1 |
| ПЕРЕНОСНЫЕ НАПОЛЬНЫЕ ВЕСЫ | 1993 |
|
RU2077034C1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| ГИДРОКОМПЕНСАЦИОННЫЕ ВЕСЫ (ВАРИАНТЫ) | 2001 |
|
RU2199092C2 |
1. ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ НА СУДАХ, соде1эжащие грузоприемную и гиревую платформы, связанные рычажной системой, и стрелочный ука- _затель, отличающиеся тем, что, с целью повышения точности бзвешивания в условиях качки судна, рычажная система выполнена в виде геометрически подобных рычагов .первого рода, расположенных горизонтально и развернутых подобными плечами в противоположные стороны, причем опо^ы рычагов размещены на одной вертикали, а весы снабжены двумя барабанами, образующими вра~ щательную передачу внеп1него1сасания, 'при этом оси барабанов совмеще-. ны с опорами рычагов, малые йЛечи которых соединены с грузоприемной платформой, а большие плечи - с гиревой платформой, Kpcwe трго, оба крайних шарнира одного из рапагов соединены с грузоприемной и' гиревой платформами посредством промежуточных звеньев в виде подвесок, причем центр масс каждого барабана не совпадает с его осБЮ.(ЛСО"36:о а:>&00 4^
Изобретение относится к весоизмерительной технике и предназначено главным образом для использования на морских судах.
Известны весы, содержащие грузовую и гиревую платформы, связанные pы J:aжнoй системой, и указатели взимного положения платформ tlj.
Это устройство не обеспечивает высокой точности взвепливания.
Из известЕ1ых устройств наиболее близким пб технической сущности к предложенному,являются весы, содержащие грузоприемную и гиревую платформы, связанные рычажной системой, и стрелочный указатель С2 .
Недостатком известного устройства является неизбежность повышенного скольжения зубьев реечной передачи квадрантов, чувствительность параллелограммного механизма к воздействию моментов сил инерции при качке вокруг осей, параллельных осям wapНиров параллелограь-ма, чувствительHOCTb кулачково-ленточного механизма к действию моментов сил инерции при качке вокруг осей, параллельных оси стрелочного указателя.
Цель изобретения - повышение точности взвешивания в условиях качки судна.
Это достигается тем, что рычажная система выполнена в виде геометрически подобных рычагов первого рода, расположенных горизонтально в развернутых подобными плечами в противоположные стороны, причем опоры рычагов размещены на одной вертикали, а весы снабжены двумя барабанами, образующими вращательную передачу внешнего касания, при этом оси барабанов совмещены с опор.ами рычагов, малые плечи которых соединены с грузоприемной платформой, а большие плечи - с гиревой платформой,кроме того,оба крайних шарнира одного из рычагов соединены с грузоприемной и гиревой платформами посредством промежуточных звеньев Ъ.виде подвесок, причем центр масс каждого барабана не совпадает с его осью.
Кроме того, рычаги выполнены равноплечими, а их опоры смещены по горизонтали, причем оба плеча одного из рычагов снабжены роликами, связывающими его с грузоприемной и гиревой платформами.
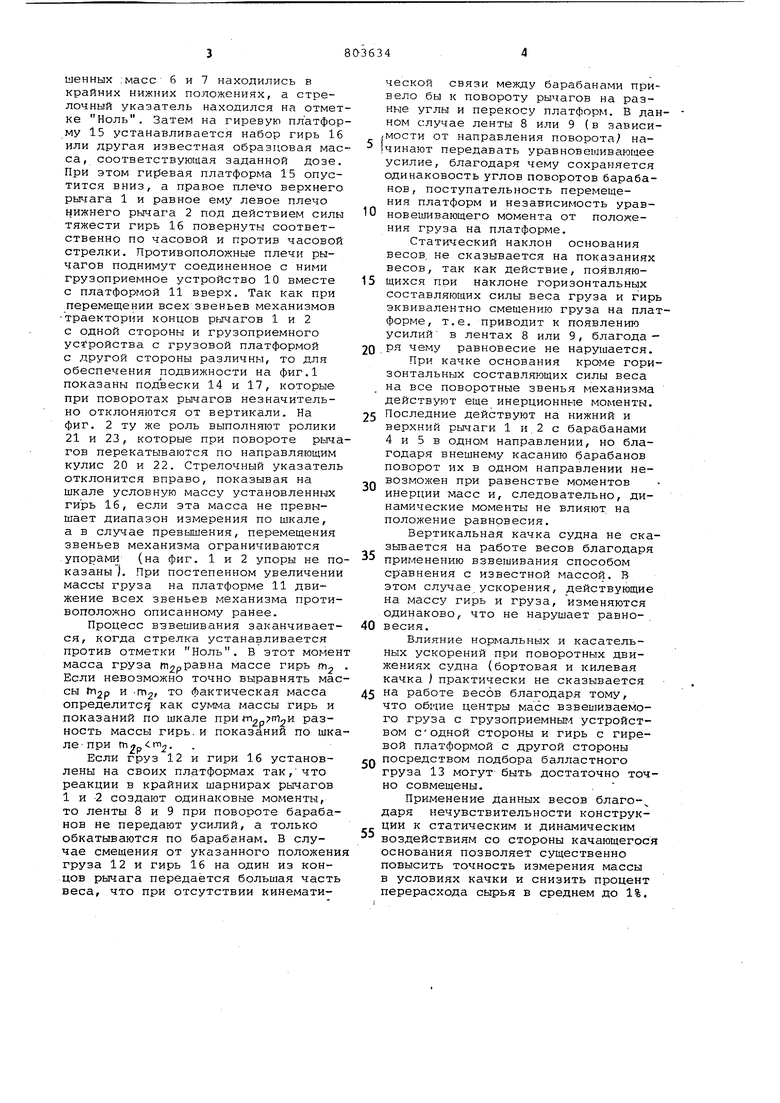
На фиг.1 показана кинематическая схема весо.в, в .которых опоры рычагов расположены на одной вертикали; на фиг. 2 - кинематическая схема весов, в которых опоры рычагов смещены по горизонтали.
Весы содержат соответственно верх0 НИИ и нижний рычаги 1 и 2 с опорами 3, барабаны 4 и 5 с массами 6 и 7. Для исключения скольжение барабанов при повороте они соединены перекрестньми гибкими связями в виде
5 лент 8 и 9. Грузоприемное устройство 10 с грузоприемной платформой 11, взвешиваемым грузом 12 и балластным грузом 13 шарнирно опирается на меньшее плечо верхнего рычага
„ и через подвеску 14 на меньшее плечо нижнего рычага. Гиревая платформа 15 с гирей 16 шарнирно соединена с большим плечом верхнего рычага 1 , и через подвеску 17 с большим плечом нижнего рычага 2. С барабаном 5 жестко соединен стрелочный указатель 18, а к корпусу неподвижно прикреплена шкала 19.
На фиг, 2 оси барабанов взаимно смещены от вертикали, что при огра0 ничейной величине смещения, не сказывается на погрешности взвешивания. Расположение осей может быть и в горизонтальной плоскости или с ограниченным смешением от горизонтали.
5 Кроме того, на фиг. 2 грузоприемное устройство 10 с грузоприемной платформой 11, взвешиваемым грузом 12 и балластным грузом 13 шарнирно опирается на правое плечо нижнего
0 рычага 2 и через кулису 20, ролик 21 на левое плечо верхнего рычага 1. Гиревая платформа 15 с гирей 16 шарнирно соединена с левым плечом нижнего рычага 2 и через кулису 22, ролик 23 с правым плечом верхнего рычага 1.
Весы работают следующим обраЗОГ1.
Перед началом взвешивания груз 0, 12 и гиря 16 сняты с грузовой 11 и гиревой 15 плaтфop 1aми. При этом весы настроены подбором масс грузоприемного устройства и гиревой плптформы так, чтобы центры неуравновеыенных :масс б и 7 находились в крайних нижних положениях, а стрелочный указатель находился на отметке Ноль. Затем на гиревую платформу 15 устанавливается набор гирь 16 или другая известная образцовая масса, соответствующая заданной дозе. При этом ги Зевая платформа 15 опустится вниз, а правое плечо верхнего рычага 1 и равное ему левое плечо нижнего рычага 2 под действием силы тяжести гирь 16 повернуты соответственно по часовой и против часовой стрелки. Противоположные плечи рычагов поднимут соединенное с ними грузоприемное устройство 10 вместе с платформой 11 вверх. Так как при перемещении всех звеньев механизмов траектории концов рычагов 1 и 2 с одной стороны и грузоприемного устройства с грузовой платформой с другой стороны различны, то для обеспечения подвижности на фиг.1 показаны подвески 14 и 17, которые при поворотах рычагов незначительно отклоняются от вертикали. На фиг. 2 ту же роль выполняют ролики 21 и 23, которые при повороте рычагов перекатываются по направляющим кулис 20 и 22. Стрелочный указатель отклонится вправо, показывая на шкале условную массу установленных гирь 16, если эта масса не превышает диапазон измерения по шкале, а в случае превьошения, перемещения звеньев механизма ограничиваются упорами (на фиг. 1 и 2 упоры не показаны ), При постепенном увеличении массы груза на платформе 11 движение всех звеньев механизма противоположно описанному ранее.
Процесс взвешивания заканчивается, когда стрелка устанавливается против отметки Ноль. В этот момен масса груза т2рравна массе гирь гм Если невозможно точно выравнять массы fn2p и , то фактическая масса определите как сумма массы гирь и показаний по шкале разность массы гирь.и показаний по шкале -при гг 2р 2Если груз 12 и гири 16 установлены на своих платформах так,что реакции в крайних шарнирах рычагов 1 и -2 создают одинаковые моменты, то ленты 8 и 9 при повороте барабанов не передают усилий, а только обкатываются по барабанам. В случае смещения от указанного положени груза 12 и гирь 16 на один из концов рычага передаётся большая часть веса, что при отсутствии кинематической связи между барабанами привело бы к повороту рычагов на разные углы и перекосу платформ. В даном случае лентЕл 8 или 9 (в зависимости от направления поворота начинают передавать уравновешивающее усилие, благодаря чему сохраняется одинаковость углов поворотов барабанов , поступательность перемещения платформ и независимость уравновешивающего момента от положения груза на платформе.
Статический наклон основания весов, не сказывается на показаниях весов, так как действие, появляющихся при наклоне горизонтальных составляющих силы веса груза и гир эквивалентно смещению груза на плаформе, т.е. приводит к появлению усилий в лентах 8 или 9, благодаря чему равновесие не нарушается.
При качке основания кроме горизонтальных составляющих силы веса на все поворотные звенья механизма действуют еще инерционные моменты. Последние действуют на нижний и верхний рычаги 1 и.2 с барабанами 4 и 5 в одном направлении, но благодаря внешнему касанию барабанов поворот их в одном направлении невозможен при равенстве моментов инерции масс и, следовательно, динамические моменты не влияют на положение равновесия.
Вертикальная качка судна не сказьшается на работе весов благодаря применению взвешивания способом сравнения с известной массой. В этом случае ускорения, действующие на массу гирь и груза, изменяются одинаково, что не нарушает равно-. весия.
Влияние нормальных и касательных ускорений при поворотных движениях судна (бортовая и килевая качка ) практически не сказывается на работе весов благодаря тому, что общие центры масс взвешиваемого груза с грузоприемньЕЛ устройством сОДНОЙ стороны и гирь с гиревой платформой с другой стороны посредством подбора балластного груза 13 могут быть достаточно точно совмещены.
Применение данных весов благодаря нечувствительности конструкции к статическим и динамическим воздействиям со стороны качающегос основания позволяет существенно повысить точность измерения массы в условиях качки и снизить процент перерасхода сырья в среднем до 1%.
IT
Фиг,2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Весы квадратные | 1976 |
|
SU541091A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
