рычажную систему, складываются (при этом Ф, Ф2). Противовесы создают устойчивое равновесие механизма. Величина их суммарного наибольшего момента не должна значительно превышать порога чувствительности весов для его минимального влияния на результаты взвешивания.
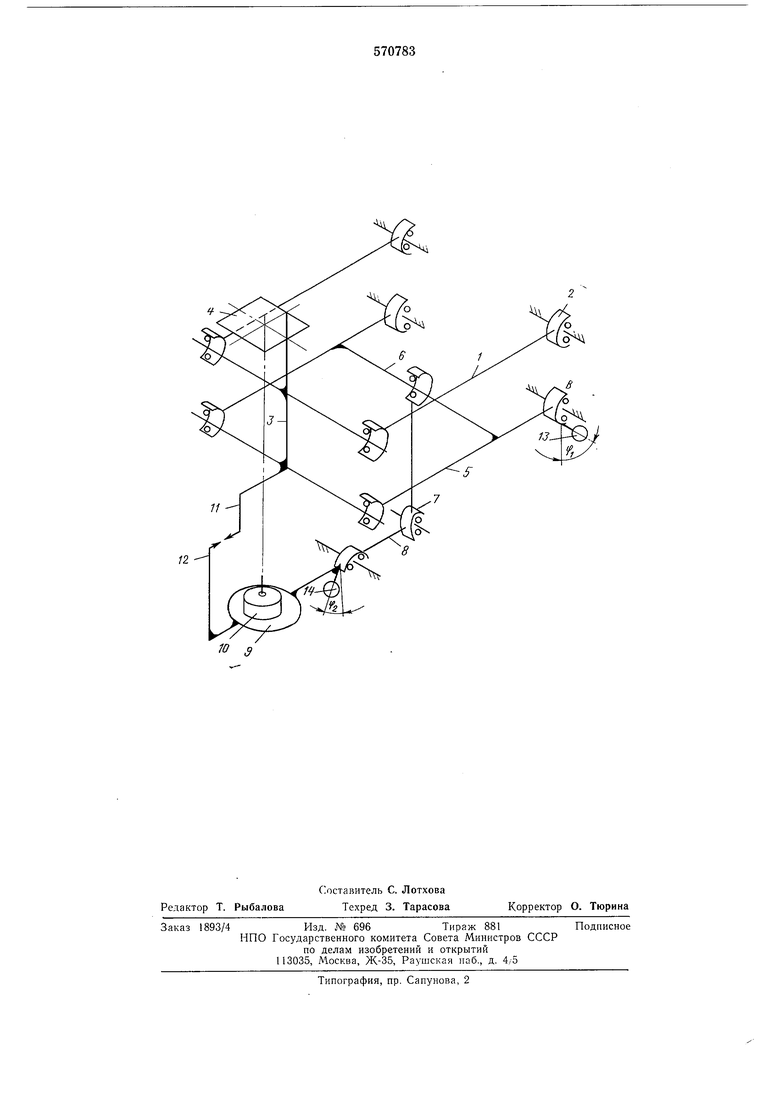
В положении равновесия рычаги параллелограмма 1 и рычаг 8 устанавливаются горизонтально, а свободные части указательных рычагов 11 и 12 - на одной горизонтальной линии. Под действием гири 10 платформа 9 перемещается в крайнее нижнее положение, рычаг 8 поворачивается против часовой стрелки, рычаги параллелограмма 1 враш,аются по часовой стрелке, платформа 4 занимает крайнее верхнее положение. Под действием груза, масса которого равна условной массе гири, грузовая платформа 4 перемеш;ается вниз и после затухания колебаний останавливается в положении равновесия. При наклоне корпуса весов в плоскости параллелограмма 1 равновесие не нарушается, поскольку вертикальные (по отношению к подвижной системе координат) составляюш;)Ие веса груза и гири определяются путем умножения веса груза и веса гири на косинус угла наклона корпуса, а горизонтальные составляющие воспринимаются как радиальная нагрузка шарниров. Моменты от противовесов 13 и 14 при этом взаимно компенсируются.
При наклонах корпуса весов в плоскости, перпендикулярной к параллелограмму 1 равновесие также не нарушается, так как сумма моментов от противовесов 13 и 14 не изменяется вследствие того, что остаются неизменными их углы относительно вертикали, а вертикальные составляющие грузов уравновешиваются аналогично первому случаю. Горизонтальные составляющие грузов воспринимаются шарикоподшипниками шарниров как осевые нагрузки.
5 При качке в условиях неспокойного моря каждая точка судна имеет свое значение ускорения. Чтобы исключить влияние указанных ускорений, гиревая платформа расположена таким образом, что в среднем Положении ее
вертикальная ось совпадает с осью грузовой платформы. Это обеспечивает пренебрежительно малые различия ускорений. Влияние ускорений на противовесы 13 и 14 не оказывает значительного влияния на точность взвешивания, поскольку величина их.суммарного момента должна незначительно превышать значение порога чувствительности весов, следовательно, погрешность составляет долю от указанной минимальной величины.
Формула изобретения
1. Рычажные весы, содержащие грузовую и гиревую платформы, связанные рычажной системой, и указатели взаимного положения платформ, отличающиеся тем, что, с целью повыщения точности взвешивания в условиях неспокойного моря, рычажная система выполнена в виде шарнирного параллелограмма, с
0 вертикальным свободным стержнем которого связана грузовая платформа, а с его нижним горизонтальным стержнем, выполненным в виде рычага второго рода, связана гиревая платформа.
2. Весы по п. 1, отличающиеся тем, что рычажная система снабжена двумя противовесами, размещенными в противоположных четвертях круга.

| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажные весы | 1979 |
|
SU832347A1 |
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Рычажные весы | 1981 |
|
SU1015257A1 |
| Весы квадратные | 1976 |
|
SU541091A1 |
| Устройство для взвешивания в условиях качки | 1977 |
|
SU711370A1 |
| Судовое весовое устройство | 1982 |
|
SU1064149A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА | 1969 |
|
SU237416A1 |
| Весоизмерительное устройство | 1979 |
|
SU885816A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО И ПОСТОЯННОГО ВЗВЕШИВАНИЯ ЖИДКОСТЕЙ С АГРЕССИВНЫМИ СВОЙСТВАМИ И ПЕРЕМЕННЫМИ ВЕЛИЧИНАМИ ПЛОТНОСТИ ИЛИ УДЕЛЬНОГО ВЕСА ИЗ-ЗА КОЛЕБАНИЙ ТЕМПЕРАТУРЫ И МАССОВОЙ ДОЛИ КОМПОНЕНТОВ | 1992 |
|
RU2062999C1 |
| Весы квадрантные | 1978 |
|
SU881533A1 |