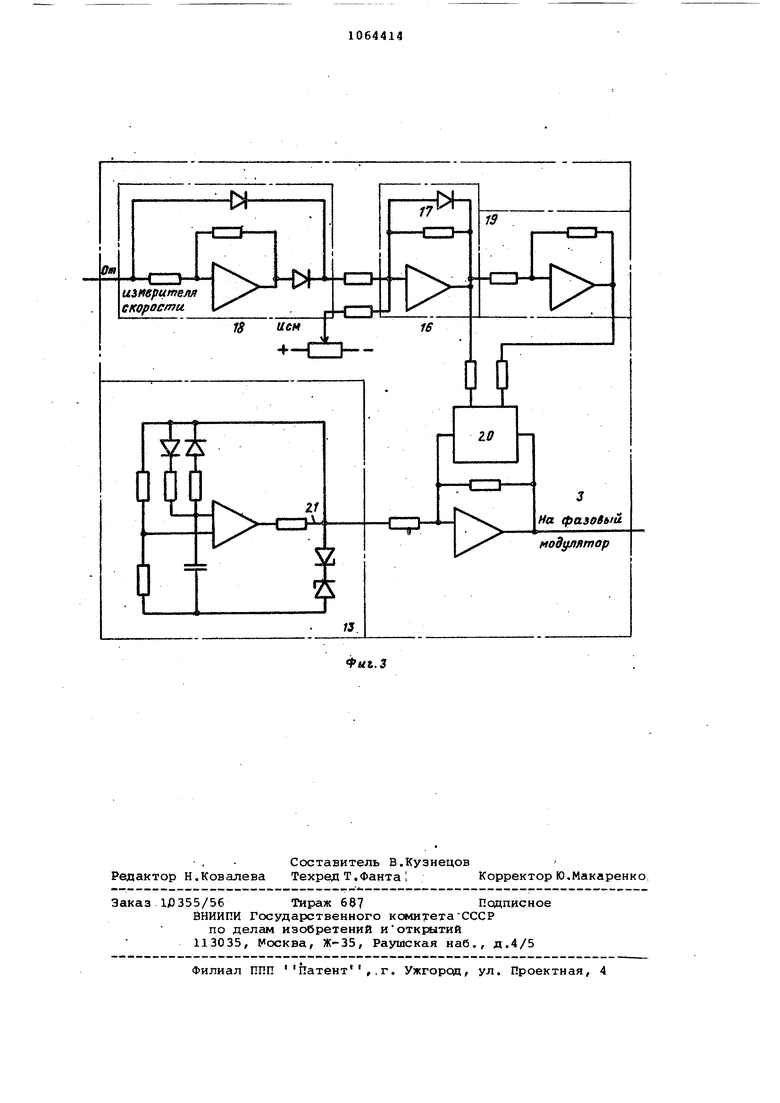
Изобретение относится к электротехнике и может использоваться при построении частоты-управляемых асин хронных электроприводов, содержащих вентильные преобразователи частоты с автономнными инверторами тока с широким диапазоном регулирования скорости. По основному авт.св. № 680129 известен частотно-управляемый асинхронный электроприбод, содержащий вентильный преобразователь частоты с автономным инвертором тока, управ лягацие входы которого подключены к выходам блока управления, и с управ ляемым выпрямителем, управляющие входы которого через блок импульснофазового управления, регулятор тока и функциональный преобразователь под ключены к выходу регулятора скорости и, регулятор скольжения, подключенный входом к выходу функционального преобразователя, неуправляемый генератор модулирующего сигнала и фазовый модулятор, Ёходы которого подключены к выходам упомянутых регулятора скольжения и генератора,а вь1ход входу блока управления инверторомClJ Расширение диапазона регулировани происходит за счет использования в электроприводе фазового модулятора, на второй вход которого подключен генератора модулирующего сигнала. Однако в известном электроприводе максимальная частота модуляции и выходного сигнала инвертора равны и выбраны по коммутирующим возможное тям инвертора 60 Гц, чтобы избежать применения специальных быстродействукяцих вентилей. Оптимальное соотношение .между выходной частотой и частотой модуляции обычно лежит в пределах 8+10. При увеличении скорости вращения это соотношение умень шается и стремится к единице при этом появляется резкая несимметрия фазных токов инвертора и возрастают потери в системе инвертор-двигатель Цель изобретения - улучшение эксплуатационных характеристик устройства за счет обеспечения широкого диапазона регулирования скорости. Поставленная цель достигается тем, что в частотно-уп-равляемый асин хронный электропривод, содержащий вентильный преобразователь частоты с автононым инвертором тока, управляющие входы которого подключены к выходам блока управления, и с управляемым выпрямителем, управляющие входы которого «через блок импульснофазового управления, регулятор тока и функциональный преобраватель подключены к выходу регулятора скорости и регулятор скольжения, подключенный входом к выходу функционального преобразователя, неуправляемый генератор модулирующего сигнала и фазовый модулятор, входы которого подключены к выходам упомянутых рёгу лятора скольжения и генератора, а выход - к входу управления инвертором,снабжен нелинейным блоком с управляемым входом, причем вход фазового модулятора подключен к выходу неуправляемого генератора модулирующего сигнала через нелинейный, блок, управляющий вход которого соединен с выходом измерителя скорости, при этом нелинейный блок реализует функцию Р 7 /%о«/ 0. р . 1де выходной сигнал нелинейного блока; ш и текущая и номинальная часто ты вращения. На фиг. 1 представлена функциональная схема частотно-управляемого асинхронного электропривода; на фиг. 2- передаточная функция нелинейного блока; на фиг. 3 - пример его реализации. Частотно-управляемый электропривод содержит автонномный инвертор 1, управляющий вход которого через блок 2 управления, фазовый модуля- top 3, индукционную машину 4 и регулятор 5 скольжения подключен к функциональному преобразователю 6, управляемый выпрямитель 7, выход кото рого подключен к инвертору 1, а управляющий вход через блок 8 импульсно-фазового управления и регулятор 9 тока подключен к другому рыходу функционального преобразователя 6, вход которого соединен с выходом регулятора 10 скорости, нелинейный блок 11, управляющий вход которого подключен к измерителю 12 скорости, неуправляемый генератор 13 модулирующего сигнала, выход которого через нелинейный блок 11 подключен к входу фазового модулятора 3. К выходу инвертора 1 подключен асинхронный электродвигатель 14, имеющий на валу индукцтонную машину 4. Обработка информации идет на высокой частоте, получаемой с выхода генератора опорного сигнала 15, Нелинейный блок 11 может быть выполнен согласно фиг. 3, где блок 16 суммирования содержит ограничивающий диод 17 в цепи обратной связи. Вход блока 16 соединен через блок 18 выделения модуля свыходе измерителя 12 скорости (фиг. 1). Выход блока 16 подключен через инвертор 19, а ч.акже напрямик соответственно к блоку 20 ограничения, выход которого соединен с входом фазового модулятора 3.Управляющий вход 21 блока 20 огра ничения соединен с генератором 13 моиулйрукэдего сигнала.
Электропривод работает следующим образом.
Сигнал заданного значения скорости подается на регулятор 10 скороести, на вычитающий вход которого подается сигнал обратной связи с измерителя 12 скорости. Выход регулятора 10 скорости через функциональный преобразователь б подключен к регулятору 5 скольжения. Регулятор 9 тока через блок 8 импульсно-фазового управления подключен к вентилям управляемого выпрямителя 7. Опорный сигнал, поступающий с генератора 15 опорного сигнала на второй вход регулятора 5 скольжения последовательно модулируется по фазе: в регуляторе 5 скольжения - пропорционально заданному, скольжению; в индукционной машине 4 - пропорционально углу поворота ее вала; в фазовом модуляторе 3 - пропорционально сигналу на его управляющем входе. Затем в блоке 2 управления инвертором путем сравнения фаз входных сигналов опорного и промодулированного, происходит демодуляция и формирование сигналов управления вентилями инвертора
В области низких частот происходит модуляция выходного тока инвертора .и его среднее значение изменяется по синусоидальному закону.
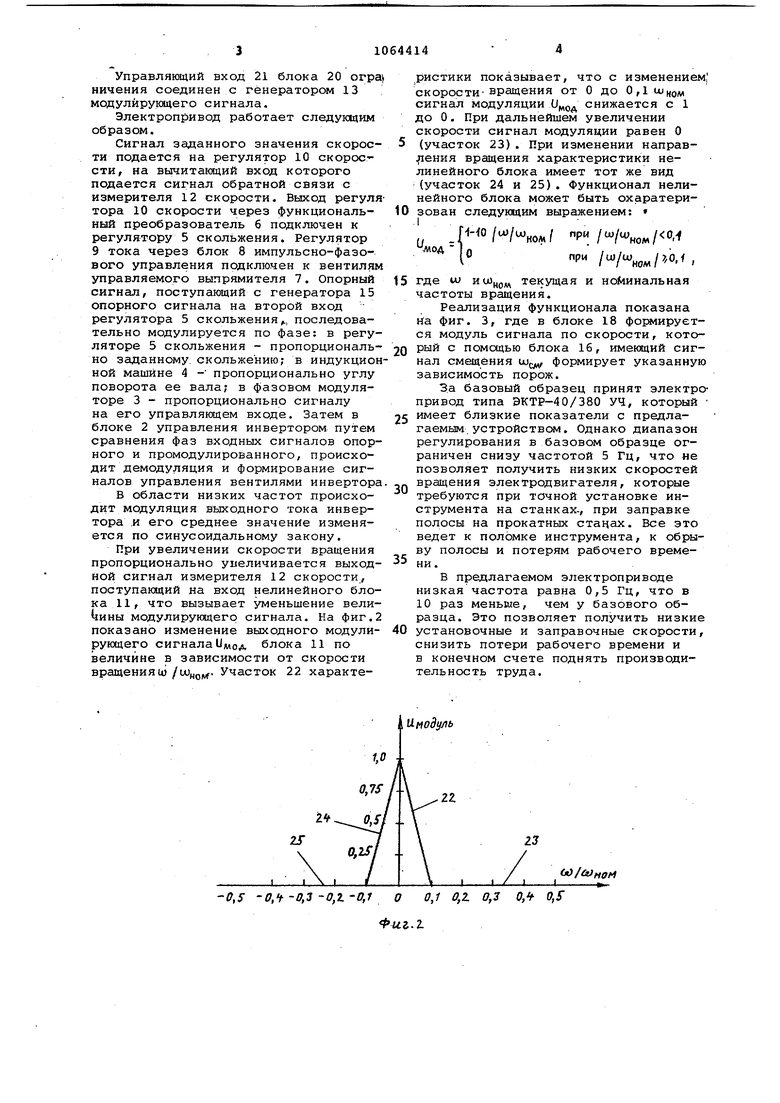
При увеличении скорости вращения пропорционально увеличивается выходной сигнал измерителя 12 скорости, поступающий на вход нелинейного блока 11, что вызывает уменьшение вели 1ины модулирующего сигнала. На фиг.2 показано изменение выходного модулирующего сигналаUMOA блока 11 по величине в зависимости от скорости вращенияш /иощ,. Участок 22 характеристики показывает, что с изменением, СКОРОСТИвращения от О до 0,lU)How сигнал модуляции снижается с 1 до 0. При дальнейшем увеличении скорости сигнал модуляции равен О (участок 23). При изменении направ|1ения вращения характеристики нелинейного блока имеет тот же вид (участок 24 и 25). Функционал нелинейного блока может быть охаратери0 зован следующим выражением:
,1
JMO/и /ш„о,, / при /u,/u,,-f
.мод Р / /%oм/0
5 где и; текущая и номинальная частоты вращения.
Реализация функционала показана На фиг. 3, где в блоке 18 формируется модуль сигнала по скорости, который с помощью блока 16, имекяций сигнал смещения Ш(,д формирует указанную зависимость порож.
За базовый образец принят электропривод типа ЭКТР-40/380 УЧ, который имеет близкие показатели с предлагаемым, устройством. Однако диапазон регулирования в базовом образце ограничен снизу частотой 5 Гц, что не позволяет получить низких скоростей вращения электродвигателя, которые требуются при точной установке инструмента на станках-, при заправке полосы на прокатных стацах. Все это ведет к поломке инструмента, к обрыву полосы и потерям рабочего времени .
В предлагаемом электроприводе низкая частота равна 0,5 Гц, что в 10 раз меньше, чем у базового образца. Это позволяет получить низкие 0 установочные и заправочные скорости, снизить потери рабочего времени и в конечном счете поднять производительность труда.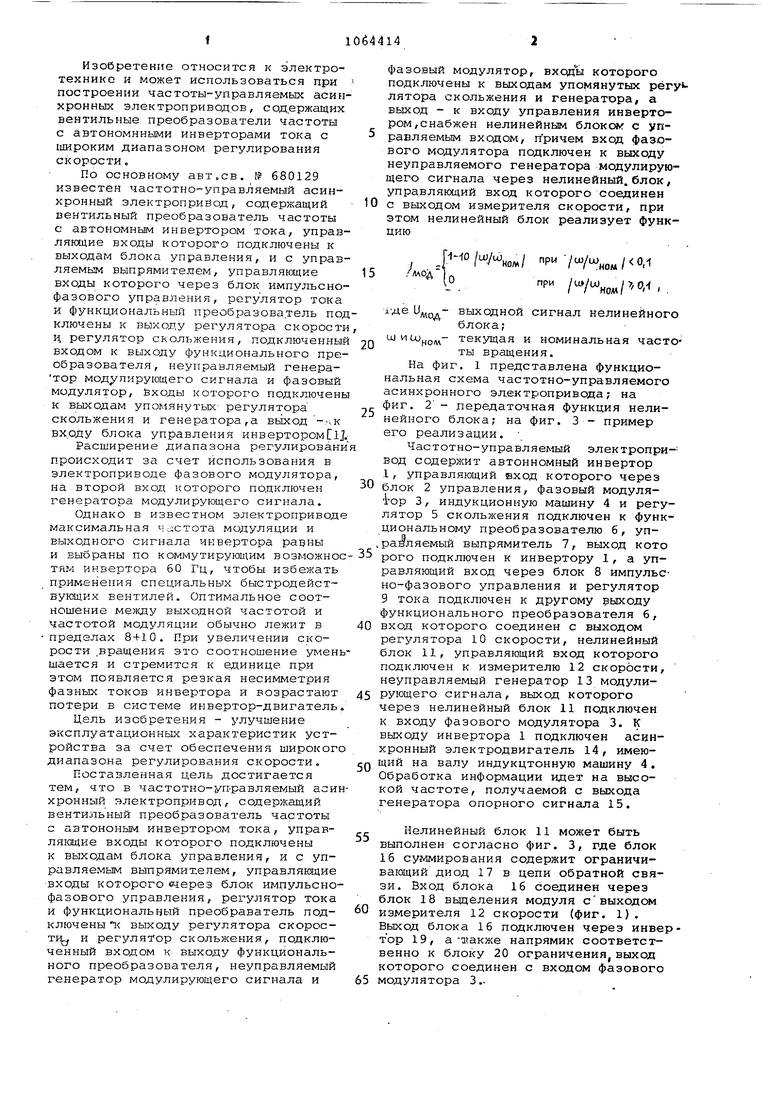
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотноуправляемый асинхронный электропривод | 1976 |
|
SU680129A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Частотноуправляемый асинхронный электропривод | 1983 |
|
SU1129711A2 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| Модуляционный асинхронныйВЕНТильНый гЕНЕРАТОР | 1978 |
|
SU811482A1 |
ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД по авт.св. 680129, отличают ийс я тем, что, с целью улучшения эксплуатационных характеристик устройства, обеспечения имрокого диапазона регулирования скорости, он снабжен нелинейньом блоком с управляемым входом, причем вход фазового модулятора пдцключен к выходу неуправляемого генератора модулирующего сигнала через нелинейный блок, управлягаций вхся которого соединен с выходом измерителя скорости, при этом нелинейный блок реализует функцию J1HO ,д„ / при /uj/u HOM / Oi и мод Опри- / w/u, / , 0,1 где - выходной сигнал нелинейного блока; u)M текущая и номинальная частоты вращения. (Л О5 4 4
Z3
Ш/ШноИ
JL
0,5 -0,4 -0,3 -0,Z -0,1 О 0,1 0,2. 0,3 0, 0,
Фиг..2.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контрольно-сигнальный клапан для спринклерных систем | 1949 |
|
SU80129A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
