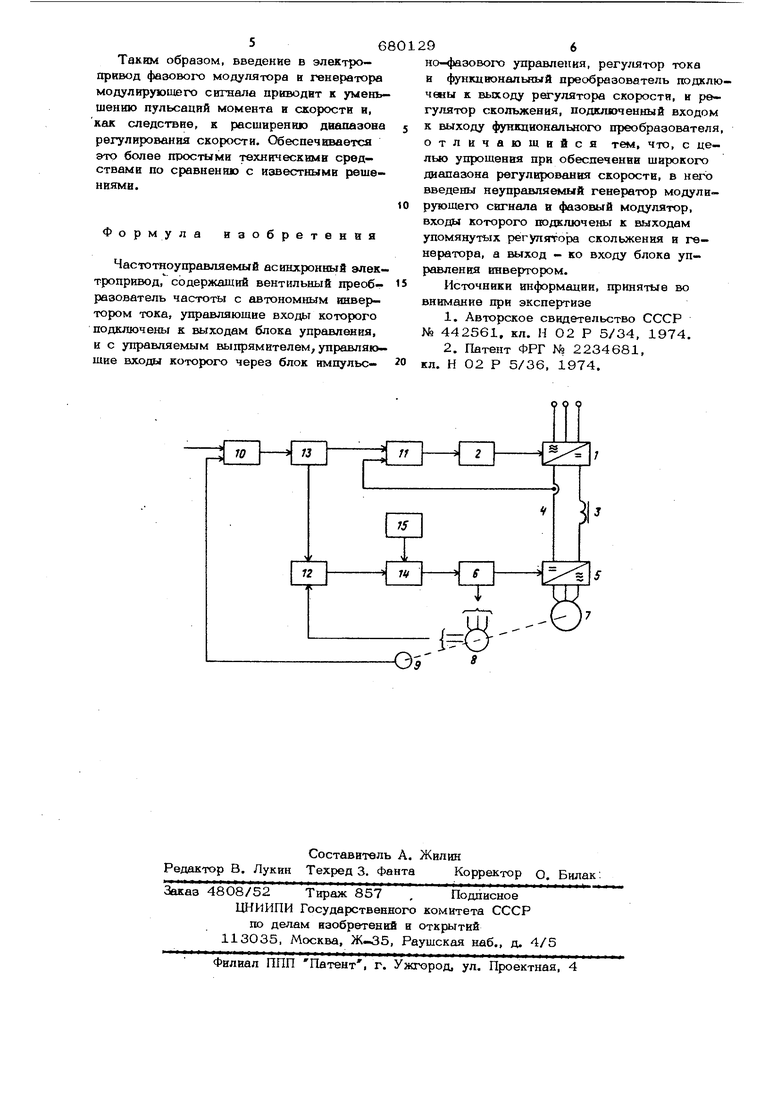
Изобретение относится к области упра ляемого электропривода и может использоваться при построении частотноуправляемых асинхронных электроприводов, содер жашах вентильные преобразователи часто- тьг с автономными инверторами тока, с широким диапазоном регулирования скорости. Известный частотноуправляемый асинхронный электропривод с вентильным преобразователем частоты, выполненным на основе инвертора тока l, имеет ограниченный диапазон регулирования. Объясняется это наличием пульсаций момента Н скорости в области низких скоростей вращения из-оа низкой частоты переключения вентилей инвертора. Из известных решений наиболее близким к данному изобретению по технической сущности и средствам реализации 5Ш- ляется электропривод по 2. Указанный известный частотноуправляемый асинхронный электрюпривод содержит вентильный преобразователь частотьг с автономным инвертором тока, управляющие входы которого подключены к выходам блока управления, и с управляемым выпрямителем, управляющие входы которого через блок импульсно.-фазового управления, регулятор тока и функциональный преобразователь подключены к выходу регулятора скорюс- ти. Электропривод содержит также датчик скорости и регулятор скольжения. Расширение диапазона регулирования обеспечивается здесь за счет введения в электропривод двух регуляторов момента, один из которых подключен на вход регулятора скольжения, а другой - ко входу регулятора тока. Недостаток указанного известного электропривода заключается в его сложности, т.к. необходим формирователь истинного значения момента двигателя, к которому предъявляются жесткие требования по точности и стабильности характеристик. Целыо изобретения является упрюшение электропривода с инвертором тока при обеспечении широкого диаийзоиа регулнро ваввя скорости. Поставленная цель достигается тем, что в извозтный частотвоуправляемый асвв xpOHBbffi элехтроорввод введен ьеуправля емый генератор модулнруюшегчз сигнала а фавовый модулятор, входы которого подключены к выходам ред-улятора скольже ВИЯ и генератора, а выход - ко входу блока управления шшертором. На чертеже представлена функциональная схема электропривода, построенная в соответствии с изобретением. Электропривод содержит мостовой трех фазный управляемый выпрямитель 1 с блоком импульсно-фазовогь управления 2, дроссель 3 и датчик тока 4 в цеп в посто- samoro тока, автономный инвертор 5 с блоком управления инвертором 6, асинхронный двигатель 7 с находящимися на его валу датчиками угла поворота 8 и скорости 9, регуляторы скорости 10, тока 11, скольжения 12, функциональный преобразователь. 13, фазовый модулятор 14 и генератор модулирующего сигнала 15. Работа электропривода осуществляется следующим образом. Сигнал заданного значения скорости подается на регулятор скорости 10. На вычитающий вход этого регулятора поступает сигнал обратной связи, снимаемый с датчика скорости 9. Выход регулятора скорости 10 подключен к функ ционал ъйому преобразователю 13. Один из его выходных сигналов, являющийся заданным значением тока, поступает на вход регулятора тока 11, на второй вход которого подается сигнал обратной связи по току, снимаемый с датчика тока 4. Вы ход регулятора тока подключен ко входу блока импульсно-фазового управления 2 вентилями управляемого выпрямителя 1. Второй выходной сигнал функционального преобразователя 13,являюшиЗся заданным .значением скольжения, поступает на вход регулятора скольжения 12. На другой вход регулятора скольжения 12 подключен выход датчика угла поворота 8, предотавля- ющего собой, например, бесконтактный сеяьсш. Трехфазная обмотка сельсина под ключена к одному из выходов блока управ левая инвертором 6. Выход регулятора скольжения 12 подключен к одному из вхо дов фазового модулятора 14, второй вход которого соединен с т гходом генератора модулирующего сигнала 15. Выход фазово го модулятора 14 соединен со входом бло ка управления инвертором 6, выходные сигналы которого используются для управления вентилями автономного инвертора тока 5, подключенного к статорной обмотке асинхронного двигателя 7. Блок управления инвертором 6 клрабатывает опорный сигнал, представляющий собой трехфазное напряжение,частота которого Ш о значительно больше номинальной частоты W) ном напряжения статора асинхронного двигателя 7. При прохождении опорного сигнала через датчик угла поворота 8, регулятор скольжения 12 и фазоиый модулятор 14 последовательно осуществляется фазовая модуляция этого сигнала. Фазовые сдвиги, вносимые каждым из этих элементов, соответственно обозначаются, как , 2. Р чем, Ч г &, где 0 - угол поворота вала дв 1гателя в электрических радианах, фиксируемый датчиком угла поворота 8; Е),где величина, соответствующая сигналу задания скольжения, поступающему на вход регулятора скольжения 12с выхода функционального преобразователя 13; з-Хм дл. где Одд выходной сигнал генератора модулирующего сигнала 15, коэффициент пропорциональности. Выходной сигнал генератора модулиру юшего сигнала 15 представляет периодическую функцию времени, угол а также изменяется во времени по периодическому закону, в то время как -f и в установивщемся режима изменяются во времени по линейному закону. В результате на вход блока управления инвертором 6 поступает опорный сигнал, модулированный по фазе на угол, равный Ч-Ч - Ч 2 +Чз1 Путем сравнения фаз опорного и промоду- лированного сигналов блок управления инвертором 6 осуществляет переключение вентилей инвертора в моменты времени, при которых угол Ч достигает ряда фиксированных значший, кратных -. За счет фазовой модуляции генератором 15 переход автономного инвертора из предыдущего состояния в каждое последующее состояние (фазу инвертора) осуществляется путем многократных переключений, частота которых определяется частотой Ш ДА генератора. При этом в области ннзквх скоростей вращения снижаются пульсации фазных токов -двигателя, момента и скорости. Таким образом, введение в электропривод фазового модулятора в генератора модулирующего сигнала приводит к уменьшению пульсаций момента и скорости и, как следствие, к расширению диапазона регулирования скорости. Обеспечивается это более простыми техническими средствами по сравнению с известными решеФормула иаобре тения Частотноуправляемый асинхронный электропривод, содержащий вентильный преобразователь частоты с автономным инвертором тока, управляющие входы которого подключены к шлходам блока управления, и с управляемым выпрямителем, управляющие входы которого через блок импульсно- зового управления, регулятор тока и функциональный преобразователь подключены к выходу регулятора скорости, и регулятор скольжения, подключенный входом к выходу функционального преобразователя, отличающийся тем, что, с целью упрощения при обеспечении широкого диапазона регулирования скорости, в него введены неуправляемый генератор модулирующего сигнала и фазовый модулятор, входы которого ююдключены к выходам упомянутых регулято эа скольжения и генератора, а выход - ко входу блока управления инвертором. Источники информации, принятие во внимание при экспертизе 1.Авторское свидетельство СССР № 442561, кл. И 02 Р 5/34, 1974. 2.Патент ФРГ № 2234681, кл. Н О2 Р 5/36, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1064414A2 |
| Частотноуправляемый асинхронный электропривод | 1983 |
|
SU1129711A2 |
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
| Модуляционный асинхронныйВЕНТильНый гЕНЕРАТОР | 1978 |
|
SU811482A1 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1972 |
|
SU442561A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1264289A2 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Частотнорегулируемый электропривод | 1985 |
|
SU1292156A1 |
| Асинхронный частотно-регулируемый электропривод | 1981 |
|
SU957403A1 |
