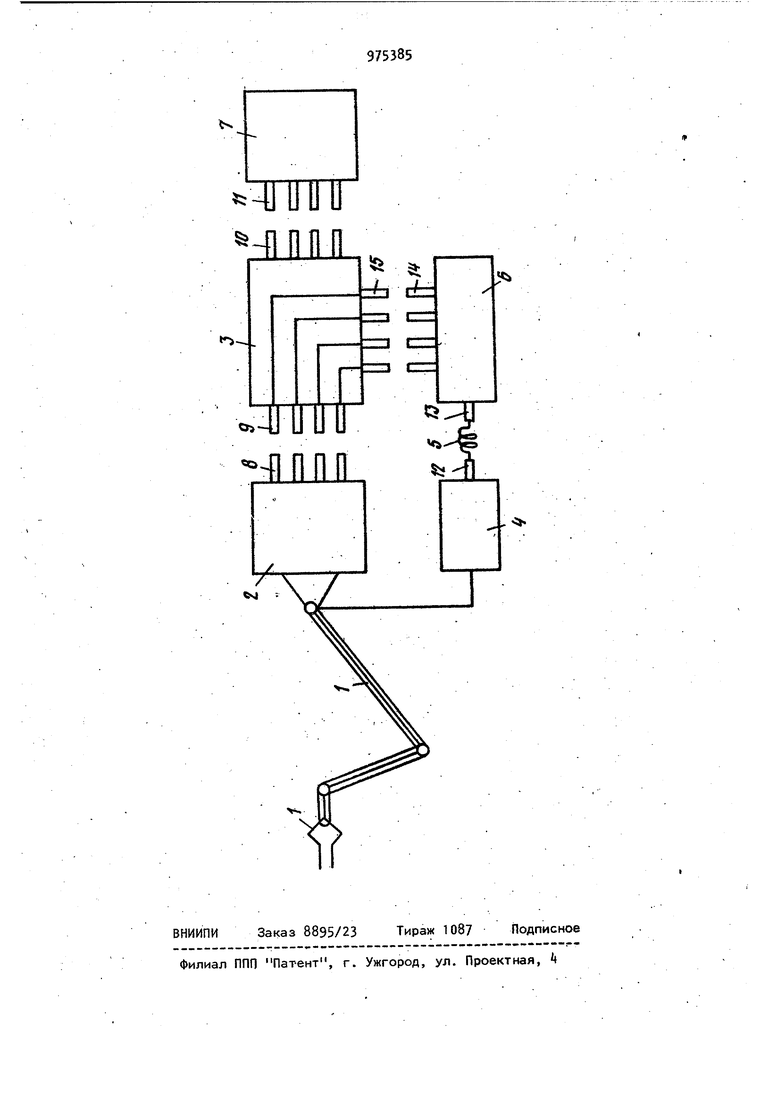
Изобретение относится к машиностроению и может быть использовано в манипулятора и работотехнйческих устройствах.. По основному авт.св. № 856787 извЬстен манипулятор, содержащий исполнительные звенья, механическую передачу, устройство развязки движений исполнительных звеньев, имеюще входные и выходныеЗвенья, и блок приводов 1 . Недостатком известного манипулятора является то, что зазоры в кинематических парах как исполнительных звеньях, так и механических передач снижают точность позиционирования исполнительных звеньев. Цель изобретения - повышение точности позиционирования. Эта цель достигается тем, что известный манипулятор снабжен натяжным устройством, содержащим дифферен циальный блок, упругий элемент и механическую передачу, а устройство развязки движений исполнительных звеньев снабжено дополнительными выходными звеньями, каждое из которых кинематически связано с соответствующим основным выходным звеном этого устройства постоянным передаточным отношением, причем дифференциальный блок натяжного устройства содержит одно выходное звено и входные звенья, число которых равно числу дополнительных выходных звеньев устройства развязки движений, кроме того, входные звенья дифференциального блока связаны с соответствующими дополнит тельными выходными звеньями устройства развязки движений, а выходное звено этого блока - с механической передачей натяжного устройства через дополнительно введенный упругий элемент. Причем передаточное- отношение натяжного устройства между выходным звеном дифференциального блока и входным звеном механической передачи натяжного устройства равно еди нице.. На чертеже изображена блок-схема предлагаемого манипулятора. Манипулятор содержит исполнител ные звенья 1, основную, механическую передачу 2, устройство 3 развязки движений., натяжное устройство,имеющее дополнииельную механическую.передачу 4, упругий элемент 5, дифференциальный блок 6 и блок 7 приводов. Исполнительные звенья 1 кинематически связаны с механической передачей 2 и с дополнительной механической передачей k натяжного уст-, ройства. Входные звенья 8 механической передачи 2 связаны с выходными звеньями 9 устройства 3 развязки движений, а входные звенья 10 этого устройства связаны с выходными звеньями 11 блока 7 приводов. Входное звено дополнительной.механической Гге:редачи k натяжного устройства через упругий элемент 5 связано с выходным .звеном 13 дифференциального блока 6, входные звенья 14 которого связаны с дополнительными выходными звеньями 15 устройства 3 разбязки движений исполнительных звеньев манипулятора. Манипулятор работает следующим образом/ При включении одного из приводов движение с выходного звена 11 передается через устройство 3 развязки движений и механическую передачу 2 на исполнительное звено 1 манипулятора. Одновременно с этим через устройство 3 развязки движений и дифференциальный блок 6 натяжного устройства движение передается на выходное звено 13 дифференциального блока и оттуда через упругий элемент 5 на входное звено 12 дополнительной механической передачи k. При работе манипулятора выходное звено 13 дифференциального блока 6 и входное звено -12 дополнительной механической передачи 4 всегда имеют одинаковые угловые перемещения, поэтому соединяющий их упругий элемент 5 обеспечивает неизменность силового - натяжения как в механических передачах 2 и 4, так и в устрой54 стве 3 развязки движения и. в дифференциальном блоке 6. Использование натяжного устройства в манипуляторе ликвидирует люфты в подвижных соединениях передач, имеющихся в существующих и во вновь про-. ектируемых манипуляторах, что позволяет повысить точность позиционирования испол.нительных звеньев манипулятора без повышения требования к точности изготовления и к обработке элементов звеньев манипулятора. . Формула изобретения 1. Манипулятор по авт.св. N° 856787, отличающийся тем, что,с целью повышения точности позиционирования,.он снабжен натяжным устройством, содержащим дифференциальный блок, упругий элемент и механическую передачу, а устройство, развязки движени.й исполнительных звеньев снабжено дополнительными выходными звеньями, каждое из которых кинематически связано с соответствующим основным выходным звеном этого устройства постоянным передаточным,отношением, причем дифференциальный блок натяжного устройства содержит одно выходное звено и входные звенья, число которых равно числу дополнительных выходных звеньев устройства развязки движения, при этом входные звенья дифференциального блока связаны с соответствующими дополнительными выходными звеньями устройства развязки движений, а выходное звено этого блика - с механической передачей натяжного устройства через дополнительно введенный упругий элемент. 2. Манипулятор по п.1, о т л и чающийся тем, что передаточное отношение между выходным звеном дифференциального блока и выходным звеном механической переда- . .чй натяжного устройства равно единице. Источники .информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 856787, кл. В 25 J 11/00, 1979 ЧПППГ
-flonn
s

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1068280A1 |
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Манипулятор | 1979 |
|
SU856787A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| Рука манипулятора | 1985 |
|
SU1252167A1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |