ми выходами подключены к пускателю асинхронного двигателя ходовой части, а вход первой ветви соединен с датчиком тока асинхронного двигателя исполнительного органа, входы второй и третьей ветвей соединены с датчиком тока второго контура управления, подключенным к асинхронному двигателю конвейера, причем выходы ветвей второго контура управления подключены к блокам управления электромагнитными муфтами.
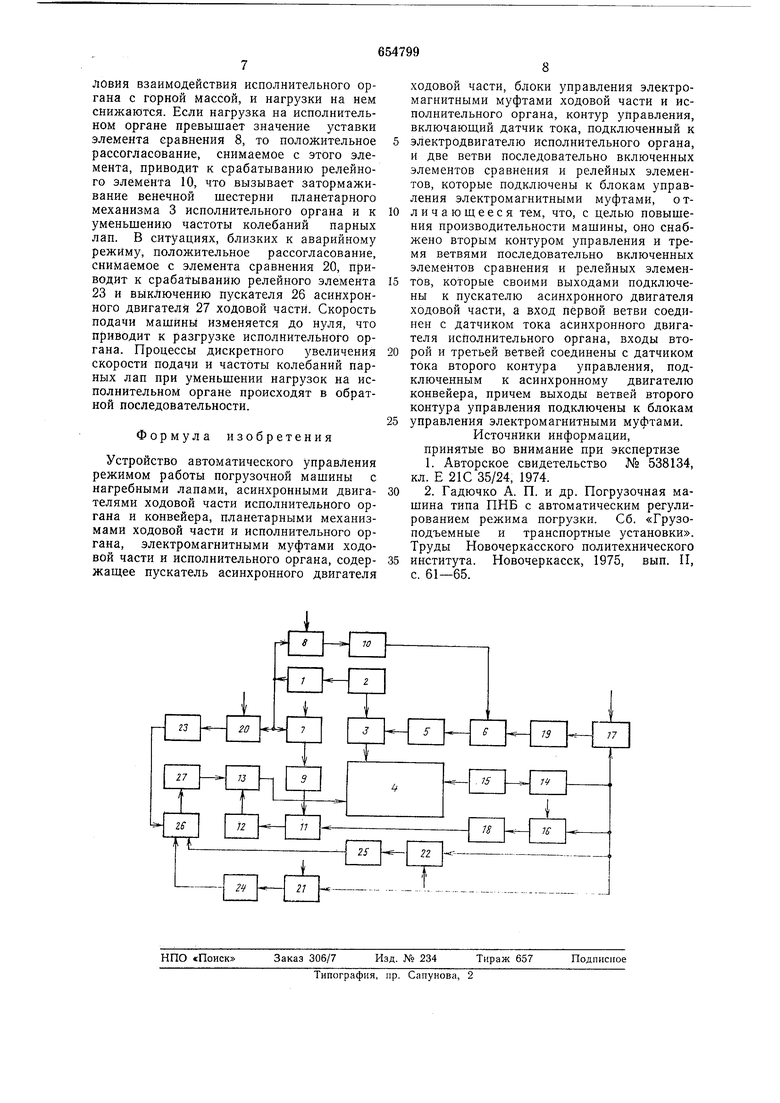
На чертеже представлена блок-схема устройства.
Устройство содержит контур управления нагрузкой исполнительного органа, включающий датчик тока 1, подключенный к асинхронному двигателю 2 исполнительного органа, связанному через планетарный механизм 3 с исполнительным органом погрузочной машины 4, электромагнитную муфту 5, подключенную к блоку управления 6, и две ветви последовательно включенных элементов сравнения 7 и 8 и релейных элементов 9 и 10. Выход релейного элемента 9 подключен к блоку управления 11 электромагнитной муфты 12, которая через планетарный механизм 13 соединена с ходовой частью машины 4. Выход релейного элемента 10 подключен к блоку управления 6 электромагнитной муфтой 5 исполнительного органа.
Второй контур управления производительностью машины включает датчик тока 14, подключенный к асинхронному двигателю 15 конвейера машины 4, и две ветви последовательно включенных элементов сравнения 16 и 17 и релейных элементов 18 и 19. Выход релейного элемента 18 подключен к блоку управления 11, а выход релейного элемента 19 - к блоку управления 6 соответственно электромагнитными муфтами 12 и 5 ходовой части и исполнительного органа машины 4.
Кроме того, устройство содержит еще три ветви последовательно включенных элементов сравнения 20, 21 и 22 и релейных элементов 23, 24 и 25, которые своими выходами подключены к пускателю 26 асинхронного двигателя 27 ходовой части. Вход элемента сравнения 20 соединен с датчиком тока 1 асинхронного двигателя 2 исполнительного органа, а входы элементов сравнения 21 и 22 соединены с датчиком тока 14 асинхронного двигателя 15 конвейера.
Устройство работает следующим образом.
Датчики тока 1 и 14 измеряют средние значения токов асинхронных двигателей 2 и 15 исполнительного органа и конвейера и установлены соответственно в силовых цепях статорных обмоток этих двигателей. Величины измеренных токов (без учета начальных значений токов холостого хода двигателей исполнительного органа и конвейера) пропорциональны полезным нагрузкам на исполнительном органе и конвейере. Полезные нагрузки на исполнительном органе являются следствием реакции
штабеля при взаимодействии парных нагребных лап с погрул аемым материалом и выражаются в виде момента сопротивления штабеля исполнительному органу, а полезные нагрузки на конвейере являются следствием весового количества погружаемого материала на перегружном конвейере и выражаются в виде момента сопротивления перемещению материала, находящегося на конвейере, по желобу. При постоянной скорости движения скребковой цепи полезные нагрузки на конвейере пропорциональны весовой производительности машины.
Элементы сравнения 16, 17 и 21, 22 сравнивают текущее значение тока асинхронного двигателя 15 конвейера с соответствующими величинами заданных уставок. Уставка элемента сравнения 21 выбирается по величине, меньшей тока холостого хода асинхронного двигателя 15 конвейера.
Уставки элементов сравнения 16, 17 и 22 соответствуют загрузкам конвейера погружаемым материалом на уровнях 0,8; 1,0 и 1,2 номинального значения. Элементы сравнения 7, 8 и 20 сравнивают текущее значение тока асинхронного двигателя 2 исполнительного органа с соответствующими величинами заданных уставок, которые выбираются соответственно равными величинам номинальной, средней
арифметической мел-еду номинальной и максимальной загрузке исполнительного органа мащины 4.
Величины, пропорциональные рассогласованию между текущими значениями токов асинхронных двигателей 15 и 2 конвейера и исполнительного органа и заданными уставками поступают с выходов элементов сравнения на входы соответствующих релейных элементов. Все релейные элементы срабатывают (включаются) при положительных рассогласованиях и OTHJскают (выключаются), если рассогласование равно иулю или отрицательно.
Каждый релейный элемент формирует управляющие воздействия, которые направлены или на дискретное изменение (дискретное уменьщение, увеличение) скорости подачи машины или на дискретное изменение (дискретное уменьшение, увеличение) частоты колебаний нагребных парных лап. Возможны следующие процессы дискретного управления режимом работы погрузочной машины.
При включении релейного элемента 24 включается пускатель 26 асинхронного двигателя 27 ходовой части, в результате чего погрузочная машина 4 нередвиг ется на штабель погрзжаемого материала со скоростыо, соответствующей передаточному
отношению планетарного механизма 13 ходовой части.
При включении релейных элементов 9 или 18 подается напряжение на блок управления 11 электромагнитной муфтой 12 ходовой части. Электромагнитная муфта 12 ходовой части, затормаживая венечную шестерню, уменьшает передаточное отношение планетарного механизма 13 ходовой части, в результате чего скорость подачи погрузочной машины 4 уменьшается в два раза.
При включении релейных элементов 10 или 19 подается напряжение на блок управления 6 электромагнитной муфтой 5 исполнительного органа. Электромагнитная муфта 5 исполнительного органа, затормаживая венечную шестерню, уменьшает передаточное отношение планетарного механизма 3 исполнительного органа, в результате чего частота колебаний нарных лап погрузочной машины 4 уменьшается в два раза.
При включении релейных элементов 23 или 25 выключается пускатель 26 асинхронного двигателя 27 ходовой части, в результате чего погрузочная машина 4 останавливается.
При выключении соответствуюш.их релейных элементов в устройстве выполняются операции, обратные вышеперечисленным.
Перед началом погрузки, когда машина 4 находится вблизи развала горной массы, оператор (машинист) подает напряжение на асинхронные двигатели исполнительного органа 2 и конвейера 15, которые приводят в движение парные нагребные лапы н цепь перегружного конвейера. Так как процесс погрузки еше не начался, то потребляемый асинхронными двигателями ток соответствует нагрузкам холостого хода. При этом положительное рассогласование появляется только на выходе элемента сравнения 21, что приводит к срабатыванию релейного элемента 24. Остальные релейные элементы будут отключены, так как на их входы с соответствуюш,их элементов сравнения подаются рассогласования отрицательной полярности.
Такое включение релейных элементов приводит к включению пускателя 26 асинхронного двигателя 27 ходовой части при расторможенном состоянии венечных шестерен планетарных механизмов 13 ходовой части и исполнительного органа 3. Машина 4 перемещается к развалу горной массы с повышенной скоростью и повышенной частотой колебаний нагребных лап. Начинается процесс погрузки горной массы.
В дальнейшем в контуре управления производительностью происходят следуюш;ие процессы, связанные с дискретным автоматическим выбором режима работы
машины по производительности погрузки. В результате взаимодействия исполнительного органа машины с горной массой возрастают нагрузки на конвейере и исполнительном органе и соответственно им токи, потребляемые асинхронными двигателями 15 и 2 конвейера и исполнительного органа соответственно. Прн достижении машиной номинальной величины производительности
0 на выходе элемента сравнения 16 появляется положительное рассогласование, что приводит к включению релейного элемента 18, и в конечном итоге к затормаживанию венечной шестерни планетарного механизма 13 ходовой части и к дискретному уменьшению скорости подачи машины несколько ниже номинального ее значения.
При увеличении загрузки конвейера выше номинального значения положительное
0 рассогласование, снимаемое с элемента сравнения 17, приводит к включению релейного элемента 19, а следовательно, к затормаживанию венечной шестерни планетарного механизма 3 исполнительного органа и к уменьшению частоты колебаний парных лап. Производительность машины 4 снижается до номинального значения, а конвейер разгружается за счет того, что машина подается на штабель с пониженной скоростью и частотой колебаний нагребных лап.
В тех случаях, когда условия работы машины на штабеле таковы, что даже малая скорость подачи и малая частота колебаний нагребных лан приводят к последуюш,ей перегрузке конвейера, снимаемое положительное рассогласование с элемента сравнения 22 приводит к включению релейного элемента 25, а следовательно, к
0 выключению пускателя 26 асинхронного двигателя 27 ходовой части и остановке машины 4. При этом происходит саморасштыбовкаприемно-транспортирующего
тракта машины н тем самым исключается
5 возможность возникновения аварийных ситуаций.
Контур управления нагрузками на исполнительном органе выполняет защитные функции н обеспечивает дискретное снижение скорости подачи, частоты колебаний парных лап и остановку машины в случаях, когда нагрузка на исполнительном органе превышает заданное значение. Этот контур работает независимо от контура управления производительностью машины, ограничивая регулируюш,ие возмолсности последнего.
При нагрузке на исполнительном органе выше номинального значения положительO ное рассогласование, снимаемое с элемента сравнения 7, нриводит к срабатыванию релейного элемента 9, затормаживанию венечной шестерни планетарного механизма 13 ходовой части и к снижению скоро5 стн подачи. В результате изменяются условия взаимодействия исполнительного органа с горной массой, и нагрузки на нем снижаются. Если нагрузка на исполнительном органе превышает значение уставки элемента сравнения 8, то положительное рассогласование, снимаемое с этого элемента, приводит к срабатыванию релейного элемента 10, что вызывает затормаживание венечной шестерни планетарного механизма 3 исполнительного органа и к уменьшению частоты колебаний парных лап. В ситуациях, близких к аварийному режиму, положительное рассогласование, снимаемое с элемента сравнения 20, приводит к срабатыванию релейного элемента 23 и выключению пускателя 26 асинхронного двигателя 27 ходовой части. Скорость подачи Машины изменяется до нуля, что приводит к разгрузке исполнительного органа. Процессы дискретного увеличения скорости подачи и частоты колебаний парных лап при уменьшения нагрузок на исполнительном органе происходят в обратной последовательности.
Формула изобретения
Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами, асинхронными двигателями ходовой части исполнительного органа и конвейера, планетарными механизмами ходовой части и исполнительного органа, электромагнитными муфтами ходовой части и исполнительного органа, содержащее пускатель асинхронного двигателя
ходовой части, блоки управления электромагнитными муфтами ходовой части и исполнительного органа, контур управления, включаюш,ий датчик тока, подключенный к электродвигателю исполнительного органа, и две ветви последовательно включенных элементов сравнения и релейных элементов, которые подключены к блокам управления электромагнитными муфтами, отличаюшееся тем, что, с целью повышения производительности машины, оно снабжено вторым контуром управления и тремя ветвями последовательно включенных элементов сравнения и релейных элементон, которые своими выходами подключены к пускателю асинхронного двигателя ходовой части, а вход первой ветви соединен с датчиком тока асинхронного двигателя исполнительного органа, входы второй и третьей ветвей соединены с датчиком тока второго контура управления, подключенным к асинхронному двигателю конвейера, причем выходы ветвей второго контура управления подключены к блокам управления электромагнитными муфтами.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство № 538134, кл. Е 21С 35/24, 1974.
2. Гадючко А. П. и др. Погрузочная машина типа ПНБ с автоматическим регулированием режима погрузки. Сб. «Грузоподъемные и транспортные установки. Труды Новочеркасского политехнического института. Новочеркасск, 1975, вып. II, с. 61-65.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Устройство для регулирования режима работы погрузочной машины с нагребными лапами | 1974 |
|
SU538134A1 |
| Устройство автоматического регулирования режима работы погрузочной машины бокового захвата с парными нагребными лапами | 1975 |
|
SU583305A1 |
| Устройство сигнализации о режимахРАбОТы гОРНОй пОгРузОчНый МАшиНы | 1979 |
|
SU840350A1 |
| ПОГРУЗОЧНАЯ МАШИНА НЕПРЕРЫВНОГО ДЕЙСТВИЯ С БОКОВЫМ ЗАХВАТОМ | 1973 |
|
SU404948A1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
