pa 18, преобразователь 16 частота- код. В электроприводе регулирование коэфф. передачи канала .обратной свя зи по току при формировании сигналов управления амплитудой выполняет ся на цифровом принципе, Используется свойство преобразователей 11, 12 пер емножать опорный сигнал и код, однако опорный сигнал в элекf
Изобретение относится к электротехнике, а точнее к частотно-управляемым тяговым электроприводам с асинхронными короткозамкнутыми двигателями, и может быть использовано при создании тяговых приводов и гребных электроустановок большой мощности с индивидуальными приводами осей (валов).
Цель изобретения - повышение точности регулирования скорости.
На фиг. 1 приведена схема частотно-управляемого тягового электропривода; на фиг, 2 - схема управляемого нелинейного блока канала обратной связи по скорости; на фиг, 3 - механическая характеристика электропривода.
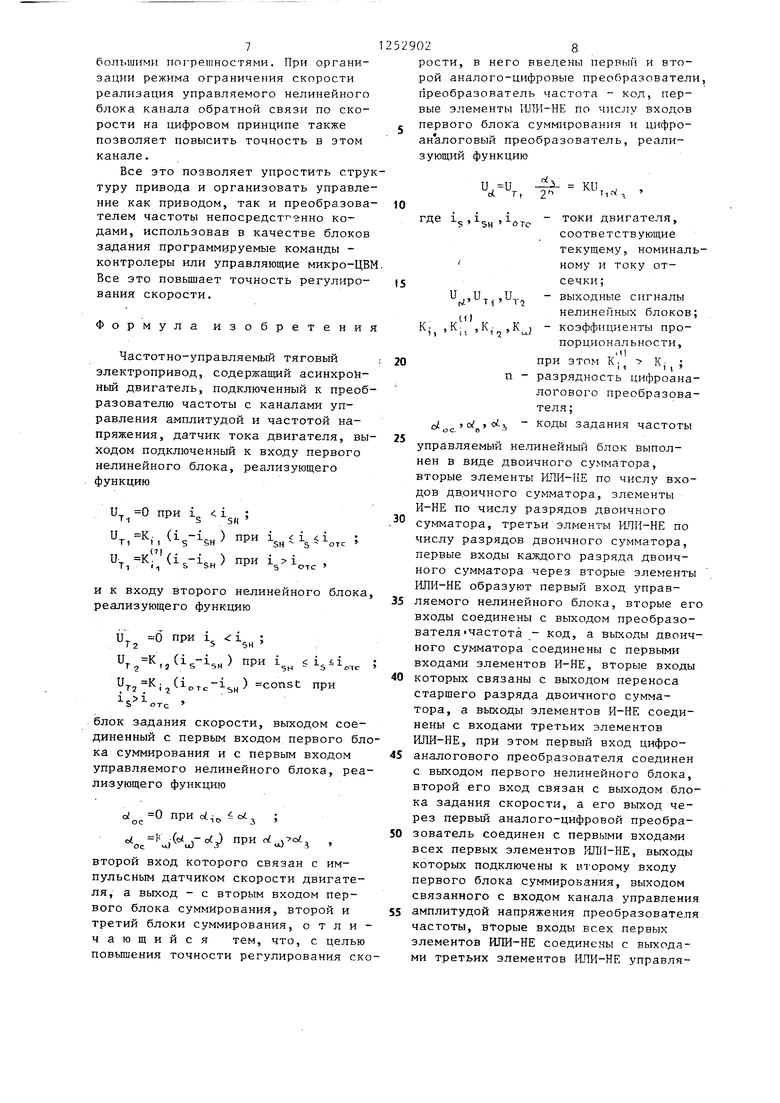
Схема частотно-управляемого тягового электропривода содержит асинхронный двигатель 1, подключенный к преобразователю 2 частоты с каналами управления амплитудой и частотой напряжения, блок 3 задания скорости, выходом соединенный с входом первого блока 4 суммирования, блок 5 задания частоты тока ротора, выходом связан- ньй с вторым входом второго блока 6 суммирования. Выход первого блока 4 суммирования подключен к входу канала управления амплитудой напряжения преобразователя 2 частоты. Выход второго блока.суммирования 6 через первые входы третьего блока 7 суммирования соединен с входом канала управления частотой преобразователя 2 частоты. Датчик 8 тока двигателя выходом .связа:н с входами первого и второго нелинейных блоков 9 и 10, а выход нелинейного блока 9 подключен к входу опорного сигнала цифроана- логового преобразователя 11, цифровые входы которого соединены с вы1252902
тропроводе является переменным. Это увеличивает стабильность параметров канала. При формировании сигналов управления частотой производится сум 5 мирование сигналов непосредственно в кодах, что устраняет погрешности. Ограничение скорости обеспечивается управляемым нелинейным блоком с повышенной точностью. 3 ил.
ходами блока 3 задания скорости. Вы-; ход цифроаналогового преобразовате- ля 11 через первый аналого-цифровой преобразователь 12 соединен с первыми входами первых элементов ИЛИ-НЕ 13, выходы которых связаны с вторым входом блока 4 суммирования. Выход второго нелинейного блока 10 через второй аналого-цифровой преобразователь
14 соединен с первым входом второго блока 6 суммирования, а вьрсод импульсного датчика 15 скорости через преобразователь 16 частота - код соединен со вторым входом третьего блока 7
суммирования и со вторым входом управляемого нелинейного блока 17, первьй вход которого связан с выходом блока 3 задания скорости, а его выход подключен к вторым входам первых
элементов ИЛИ-НЕ 13.
Управляемый нелинейный блок 17 (фиг, 2) содержит двоичный сумматор 18, вторые элементы ИЛИ-НЕ 19, выходами соединенные с первыми входами
двоичного сумматора, элементы И-НЕ 20, первые входы которых подключены к выходам двоичного сумматора, вторые их входы связаны с выходом переноса старшего разряда этого сумматора, а
их выходы соединены с входами третьих элементов ИЛИ-НЕ 21, На входы вторых элементов ИЛИ-НЕ подключен выход блока 3 задания скорости, ко вторым входам двоичного сумматора присоединен выход преобразователя 16 частота - код, а выход третьих элементов ИЛИ-НЕ является выходом блока. Первый нелинейный блок 9 реализует функцию
40
U- 0 при
I t
S Я
) ;
f«l .. , . ч,
т,i,. b Sn Р .
(11
3
где К,; К,., .
Второй нелинейный блок 10 реализует функцию
и. 0 при
UT,-Ki,(is-isH)
Ur,K,(i
-1
SH
при ) при
1 L i 1
SH Я f
Ч ОТС
Управляеьп 1й нелинейный блок канала обратной связи по скорости реализует функцию
с Р J ; ot, К(.) при
Цифроаналоговый преобразователь реализует функцию
и -и
2
КП .c.
де -1,
SH
(1)
токи двигателя, соответствующие текущему, номинальному и току отсечки;
25
К. ,,K. , - коэффициенты про-
12
и., и.
т.
т.порциональности;выходные сигналы нелинейных блоков.
30
Частотно-управляемый тяговый электропривод работает следующим образом
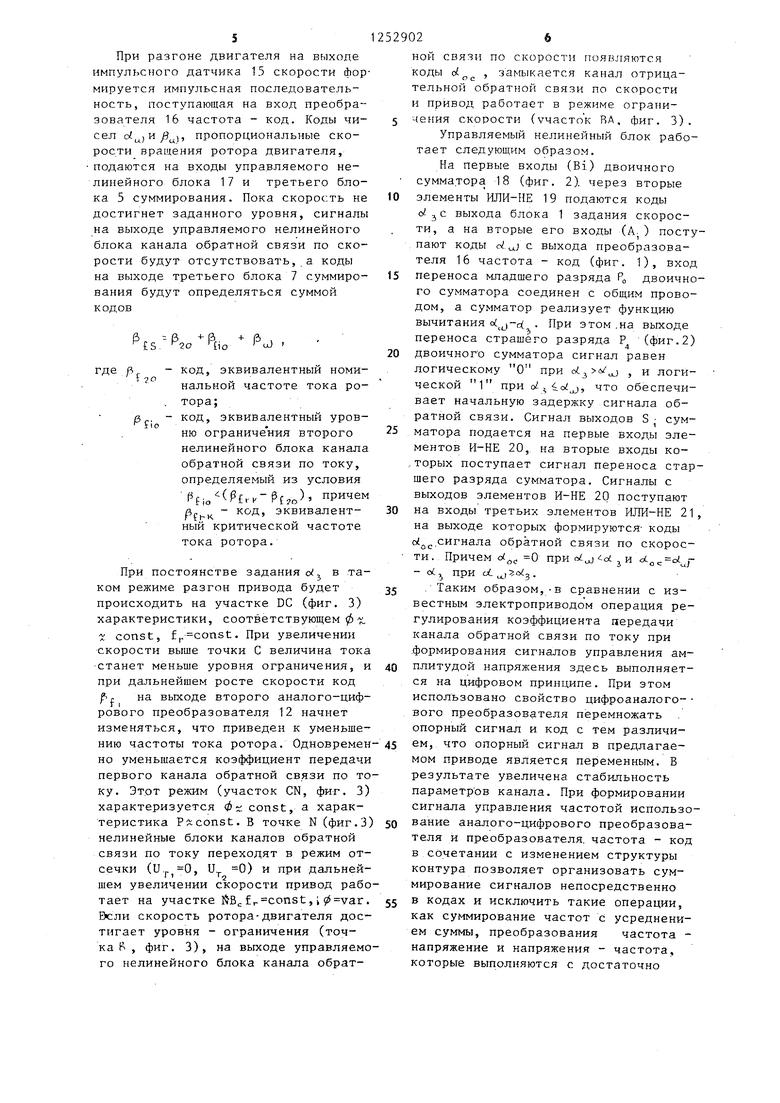
При пуске привода с выходов блока 6 задания скорости (фиг. 1) на первые входы первого блока суммирб- вания 4 подаются коды о( , соответствующие заданному уровню момента в установившемся режиме, а с выхода блока 5 задания частоты тока ротора на вторые входы второго блока 6 суммирования подаются коды , номинальной частоты тока ротора, соответствующей режиму работы на участке BN механической характеристики (фиг. 3). В результате с выхода первого блока 4 суммирования (фиг.1) коды чисел oi ,, эквивалентные углам открытия вентилей силового блока 2 преобразователя частоты, поступают на вход канала управления амплитудой напряжения этого преобразователя, определяя начальный уровень напряжения U на зажимах статора асинхронного двигателя 1 (фиг.О- Одновременно с выхода -второго блока 6 суммирования через третий блок суммирования 7 коды f подаются на вход канала управления преобразова2529024
теля 2 частоты, задавая начальную частоту напряжения, подаваемого на двигатель. В результате ток статора двигателя форсированно нарастает,
5 и сигнал на выходе датчика 8 тока достигает уровня, соответствующего вторым участкам характеристик первого и второго нелинейных блоков 9 и 10 (фиг. 1).
10 Сигнал с вьпсода первого нелинейного блока 9 подается на первый вход (вход опорного сигнала) цифро- аналогового преобразователя 11, на вторые входы которог-о подаютсд коды
15 с выхода блока.3 задания скорости. В результате, на выходе цифроаналого- вого преобразователя 11 формируется сигнал
20
U..UT,
oi.
где п - разрядность цифроаналогового
преобразователя.
Этот сигнал преобразуется первым аналого-цифровым преобразователем 12 в коды чисел т, которые через первые элементы ИЛИ-НЕ 13 подаются на второй вход первого блока 4 суммирования, на выходе которого формируется код задания амплитуды напряжения
Ы-.
Г.
соответствующий коду ошибки по току, и привод переходит в режим ограничения тока статора.
Одновременно сигнал U с выхода второго нелинейного блока 10 подается на вход второго аналого-цифрового прео бразователя 14, с выхода которого коды чисел {. (фиг. 1) поступают на первые входы второго блока 6 суммирования, на выходе которого начинает формироваться код
Pf, ,o
пропорциональный сумме кодов номинальной частоты тока ротора и величине отсечки второго нелинейного блока 10 канала обратной связи по току, что определяет уровень частоты тока ротора, близкий, но меньщий критической. Если к этому моменту двигатель еще не развернулся, то его режим будет соответствовать точке D механической характеристики (фиг. 3), а если начал вращаться - то участку CD характерис тики.
При разгоне двигателя на выходе импульсного датчика 15 скорости формируется импульсная последовательность, поступающая на вход преобразователя 16 частота - код. Коды чисел о;, и/), пропорциональные скорости вращения ротора двигателя, подаются на входы управляемого нелинейного блока 17 и третьего блока 5 суммирования. Пока скорость не достигнет заданного уровня, сигналы на выходе управляемого нелинейного блока канала обратной связи по скорости будут отсутствовать, а коды на выходе третьего блока 7 суммирования будут определяться суммой кодов
б -- (3 - (З S- Чю
/Ь
uJ
де р,
го
fio
код, эквивалентный номинальной частоте тока ротора;
код, эквивалентный уровню ограниче ния второго нелинейного блока канала обратной связи по току, определяемый из условия
pfi,(.K-pf,o) причем д - код, эквивалентный критической частоте тока ротора.
При постоянстве задания в таком режиме разгон привода будет происходить на участке DC (фиг. 3) характеристики, соответствующем ф i. const, ff,-const. При увеличении скорости выше точки С величина тока станет меньше уровня ограничения, и при дальнейшем росте скорости код г на выходе второго аналого-цифрового преобразователя 12 начнет изменяться, что приведен к уменьшению частоты тока ротора. Одновремен- но уменьшается коэффициент передачи первого канала обратной связи по току. Этот режим (участок CN, фиг. 3) характеризуется Ф const, а характеристика Ркconst. В точке N (фиг.З) нелинейные блоки каналов обратной связи по току переходят в режим отсечки (и.0, и 0) и при дальнейшем увеличении скорости привод работает на участке N-BC f г const, i . скорость ротора-двигателя достигает уровня - ограничения (точка Р , фиг. 3), на выходе управляемого нелинейного блока канала обрат0
5
0
5
0
0 5 0 5
ной связи по скорости появляются коды d , замыкается канал отрицательной обратной связи по скорости и привод работает в режиме ограничения скорости (участо к RA. фиг. 3).
Управляемый нелинейный блок работает следующим образом.
На первые входы (Bi) двоичного сумматора 18 (фиг. 2). через вторые элементы ИЛИ-НЕ 19 подаются коды о 3 с выхода блока 1 задания скорости, а на вторые его входы (А. ) поступают коды ci.j с выхода преобразователя 16 частота - код (фиг. 1), вход переноса младшего разряда Р двоичного сумматора соединен с общим проводом, а сумматор реализует функцию вычитания c(j-c( . При этом .на выходе переноса страшего разряда Р (фиг.2) двоичного сумматора сигнал равен логическому О при , и логической 1 при d kot-, что обеспечивает начальную задержку сигнала обратной связи. Сигнал выходов S сумматора подается на первые входы элементов И-НЕ 20, на вторые входы ко- .. торых поступает сигнал переноса старшего разряда сумматора. Сигналы с выходов элементов И-НЕ 20 поступают на входы третьих элементов ИЛИ-НЕ 21, на выходе которых формируются- коды Ыд.сигнала обратной связи по скорости. Причем о(д 0 при . и (j- , при .,
.Таким образом,-в сравнении с известным электроприводом операция регулирования коэффициента передачи канала обратной связи по току при .формирования сигналов управления амплитудой напряжения здесь выполняется на цифровом принципе. При этом использовано свойство цифроаналого- вого преобразователя перемножать опорный сигнал и код с тем различием, что опорный сигнал в предлагаемом приводе является переменным. В результате увеличена стабильность параметров канала. При формировании сигнала управления частотой использование аналого-цифрового преобразователя и преобразователя, частота - код в сочетании с изменением структуры контура позволяет организовать суммирование сигналов непосредственно в кодах и исключить такие операции, как суммиро1вание частот с усреднением суммы, преобразования частота - напряжение и напряжения - частота, которые выполняются с достаточно
7
большими погрешностями. При организации режима ограничения скорости реализация управляемого нелинейного блока канала обратной связи по скорости на цифровом принципе также позволяет повысить точность в этом канале.
Все это позволяет упростить структуру привода и организовать управление как приводом, так и преобразователем частоты непосредстт енно кодами, использовав в качестве блоков задания программируемые команды - контролеры или управляющие микро-ЦВМ Все это повышает точность регулирования скорости.
Формула изобретения
Частотно-управляемый тяговый электропривод, содержащий асинхронный двигатель, подключенный к преобразователю частоты с каналами управления амплитудой и частотой напряжения, датчик тока двигателя, выходом подключенный к входу первого нелинейного блока, реализующего функцию
и, 0 при 1„ i :
Т-( S SH
и К; (i -i-,, ) при
Ti 1 1 S SH
,
иТ,Ч Ч-Чн) РИ
И к входу второго нелинейного блока, реализующего функцию
и гг Р 5 SH
Р Чи .-Tc
UT2 i2 Tc-isH const при
блок задания скорости, выходом соединенный с первым входом первого блока суммирования и с первым входом управляемого нелинейного блока, реализующего функцию
при ot, 3 ;
.(и)-° з РИ .
второй вход которого связан с импульсным датчиком скорости двигателя, а выход - с вторым входом первого блока суммирования, второй и третий блоки суммирования, отличающийся тем, что, с целью повышения точности регулирования ско12529028
рости, в него введены первый и второй аналого-цифровые преобразователи, преобразователь частота - код, первые элементы ИЛИ-НЕ по числу входов первого блок а суммирования и цифро- ан алоговый преобразователь, реализующий функцию
5
0
,
где 1-,1
5Н
ore
.и,, (1)
К,. К:, ,К- ,К
1 1
Т ,.,
токи двигателя, соответствующие текущему, номинальному и току отсечки;
выходные сигналы нелинейных блоков; J - коэффициенты пропорциональности,
.4
при этом К| К,- ; п - разрядность цифроана- логового преобразователя ; , сх 5 ci, - коды задания частоты
5
0
5
0
5
0
5
управляемый нелинейный блок выполнен в виде двоичного сумматора, вторые элементы по числу входов дв.оичного сумматора, элементы И-НЕ по числу разрядов двоичного сумматора, третьи элменты РШИ-НЕ по числу разрядов двоичного сумматора, первые входы каждого разряда двоичного сумматора через вторые элементы 1-ОТИ-НЕ образуют первый вход управляемого нелинейного блока, вторые его входы соединены с выходом преобразователя частота - код, а выходы двоичного сумматора соединены с первыми входами элементов И-НЕ, вторые входы которых связаны с выходом переноса старшего разряда двоичного сумматора, а выходы элементов И-НЕ соединены с входами третьих элементов ИЛИ-НЕ, при этом первый вход цифро- аналогового преобразователя соединен с выходом первого нелинейного блока, второй его вход связан с выходом блока задания скорости, а его выход через первый аналого-цифровой преобразователь соединен с первыми входами всех первых элементов liTOJ-HE, выходы которых подключены к второму входу первого блока суммирокания, выходом связанного с входом канала управления амплитудой напряжения преобразователя частоты, вторые входы всех первых элементов ИЛИ-НЕ соединены с выходами третьих элементов ИЛИ-НЕ управля 91
емого нелинейного блока, вход второго аналого-цифрового преобразователя соединен с выходом второго нелинейного блока, а его выход связан с первым входом второго блока суммирования, на второй вход которого подключен выход блока задания частоты тока ротора, а выход второго блока суммирования соединен с первым
52902 0
входом третьего блока суммирования, выход которого связан с входом канала управления частотой напряжения преобразователя частоты, выход им- 5 пульсного датчика скорости соединен с входом преобразователя частота - код, выходы которого связаны с вторыми входами третьего блока суммирования.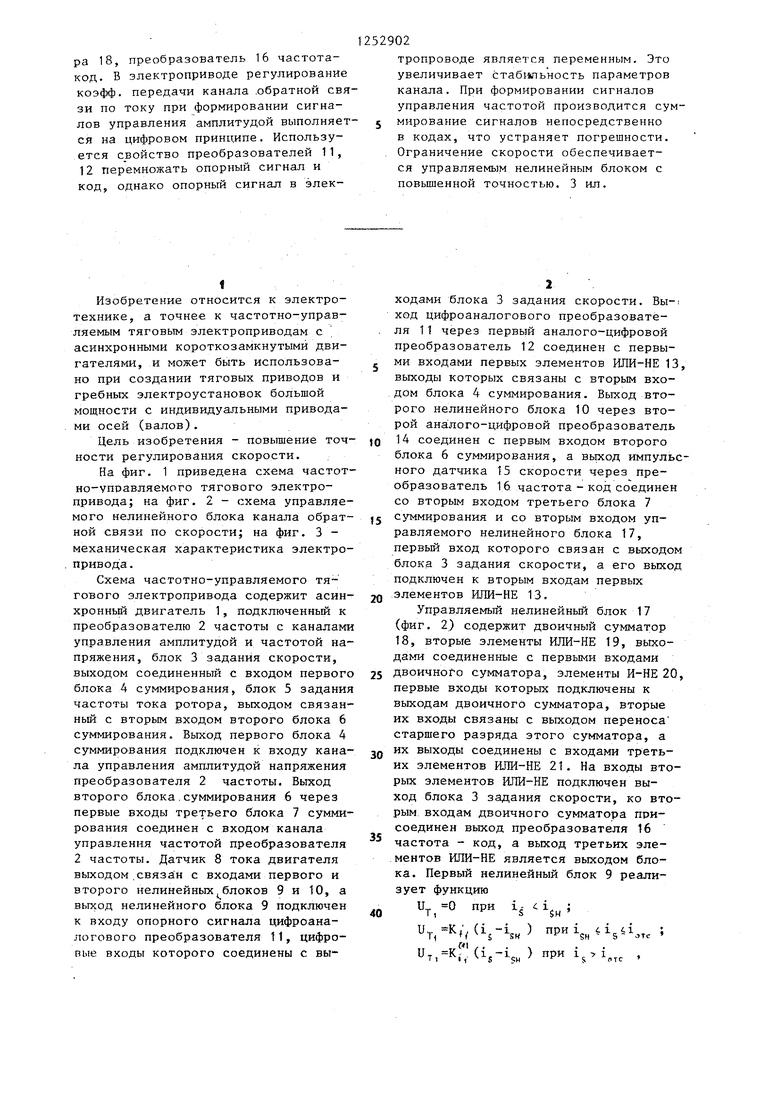

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072230A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1980 |
|
SU900397A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
Изобретение относится к электротехнике и используется при создании тяговых приводов большой мощности с индивидуальными приводами осей. Цель изобретения - повышение точности регулирования скорости. Электропривод содержит асинхронный двигатель 1, преобразователь частоты 2, блок задания скорости 3, блоки суммирования 4, 6, 7, блок задания частоты тока 5, нелинейные блоки 9, 10, датчик тока 8. В электропривод введены цифроаналоговые преобразователи 11, 12, управляемый нелинейный блок 17, в виде двоичного суммато (Л ND СЛ N9 О ГС «(J. Фиг.1
Редактор П. Коссей
Составитель В. TaipacoB Техред В.Кадар
Заказ 4629/55 Тираж; 631Подписное
ВНИЙПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
J}
М
Фиг. 3
Корректор А. Обручар
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072230A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
