ходом ячейки И и выходом подключена к суммирующему, входу реверсивного счетчика, преобразователь входами соединен с выходами реверсивного счетчика,а выходом -подключен к входу преобразователя ток-частота, выход преобразователя токгчастота. соединен с Бычитакяцим входом реверсивного счетчика и с. входом .канала управления частотой напряжения преобразователя частоты, пр|1 этом jiepвый вход ячейки И соединен .с . выходом импульсного датчика скорости, а второй вход с блоком задания частоты тока ротора. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1252902A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
1. ЧАСТОТНО-УПРАВЛЯЕМЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхроннйй двигатель,, гюдключенный к преобразователю частоты с каналами . управления амплитудой, и частотой на пряжения, датчик тока двигателя,связанный выходом с первым входом пер- вого блока суммирования, второй вход которого соединен через регулятор скорости с выходом второго блока суммирования, а выход первогоблока суммирования через регулятор тока соединен с входом канала управления амплитудой напряжения преобразователя частоты, импульсный датчик скорости двигателя, выходом подключенный к первому входу сумматора частоты, выходом связанного с входом канала управления частотой преобразователя частотьт, а второй вход сумматора частот соединен с блоком задания частоты тока ротора, выход импульсного датчика скорости двигателя через преобразователь частота-напряжение связан С первым входом второго блока суммирования, второй вход которого соединен с блоком задания скорости, отличающийся тем, что, с целью повышения точности регулирования и быстродействия и упрощения схемы, введены нелинейный блок обратной связи по току, реализующий функцию и О, при Что 5 и к JI S РИ , .Bfb« ,5дтравляе1Уплй нелинейный блок обрат:ной связи по СКОРОСТИ, реализующий функцию . (и Uoc О- ( Ри Uu) ЗС отс 00 UorJU c U, при U«,U(U3) и блок усреднения импульсной последовательности, причем нелинейный блок обратной связи по току соединен входом с выходом датчика тока и выходом связан с первым входом первого блока суммирования,, нелинейный блок обратной связи .по скорости первым входом соединен с выходом преобразоS вателя частота-напряжение, вторым (Л входом связан с блоком задания скорости, а выходом подключен к первому входу второго блока суммирования, блок усреднения импульсной последовательности входом .соединен с выходом cyivMaTOpa частот, а вь1ходом подключен к входу Канала управления частотой напряжения преобразователя, где и и выходные сигналы нелинейных блоков обратной связи го току и скорости, ig - ток статора, сигнал скорости, lj, , и.-сигналы ограничения по току и скорости, Ug. - сигнал задания. 2. Электропривод по п,1, о т л и чающийся тем, что сумматор частот содержит первую и вторую ячей.ки ИЛИ, ячейку И, узел временной задержки, блок усреднения импульсной последовательности, реверсивный счетчик, преобразователи код-ток и токчастота, при этом первый вход первой ячейки ИЛИ связан с блоком задания частоты тока ротора, а вторым входом соединен с выходом импульсного датчика скорости, вторая ячейка ИЛИ первым-входом соединена с выходом первой ячейки ИЛИ, вторым входом чёрё /зел временной задержки связана С вы
Изобретение относится к электротехнике, а точнее к часто-тно-управляемым тяговым электроприводам с . асинхроннь1ми короткозамкнутыми двигателями, и может быть использовано при создании тяговых приводов осей колесных трайспортных средств, особенно с автономными источниками энер.гии на основе дизель-генераторов.
.Известен частотно-управляемый .тяговый электропривод, содержащий , асинхронный.двигатель, подключенный .к. преобразователю частоты, импульсный датчик скоростина валу двигателя, соединенный с блоком суммировани частот с перестраиваемым коэффициентом деления, функциональный преобразователь частота-напряжение tl).
Недрстатками известного устройства являются сложность, невысокая точность управления и низкое быстродействие. .
Наиболее близким к предлагаемому техническим решением является частотно-управляемый тяговый электропривод, содержащий асинхронный двигатель, подключенный к преобразователю частоты с каналами управления амплитудой и- частотой напряжения, датчик тока двигателя, свяаанный выходом с первым входом первого блока суммирования, второй вход которого V соединен через регулятор скоррсти с выходомвторого блока суммирования, э выход первого блока суммирования через регулятор тока соединен с входом канала управления амплитудой напряжения преобразователя частоты, импульсный датчик скорости двигателя выходом подключен к первому входу сумматора частоты, выходом связанного с входом канала управления частотой преобразования частоты, а второй вход сукматора частот соединен с блоком задания частоты тока ротора; кроме .того, выход импульсного датчика скорости двиг;ателя через преобразова таль частота-напряжение связан с первым входом второго блока суммирования, второй вход которого соединен с блоком задания скорости.
Сумматор частот суммирует две импульсные последовательности с частотами, пропорциональными частоте вращения ротора двигате.ля и задаваемой частотой тока ротора. Кроме того, известный частотно-управляемый тяговый электропривод включает в себя два блока нелинейнрстей, преобразователь напряжение-частота и второй бло суммирования С2.
Недрстаткаки известного частртноуправляемого тягового электропривода являются сложность схекм, невысокая точность регулирования и недостаточно высокое быстродействие. Сложность схемы обусловлена .большим количеством нелинейных блоков, реализация которых приводит к громоздким схемным решениям и затрудняет настройку привода.
Это же приводит и к невысокой точ.ности регулирования, поскольку точно уь воспроизведения требуемых ха.рактерисТик зависит от точности реализации нелинейностей и стабильности характ:еристик блоков нелинейностей. Снижает точность и стабильность реализация, блоков суммиЕювания на основе дискретных сумматоров без средств коррекции, так как суммарные :импульсные последовательности, вопервыйх, будут неравномерными, а, во-вторых, будут иметь потерю информации. При ступенчатом изменении сигнала задания из-за большего бы.стродействия канала управления частотой в первой фазе разгона двигатель окажется на неустойчивой части характеристики, что увеличит время разгона.
Цель изобретения - повышение точности регулирования и быстродействия и упрощение схемы частотно.-управляёмого тягового.электропривода.
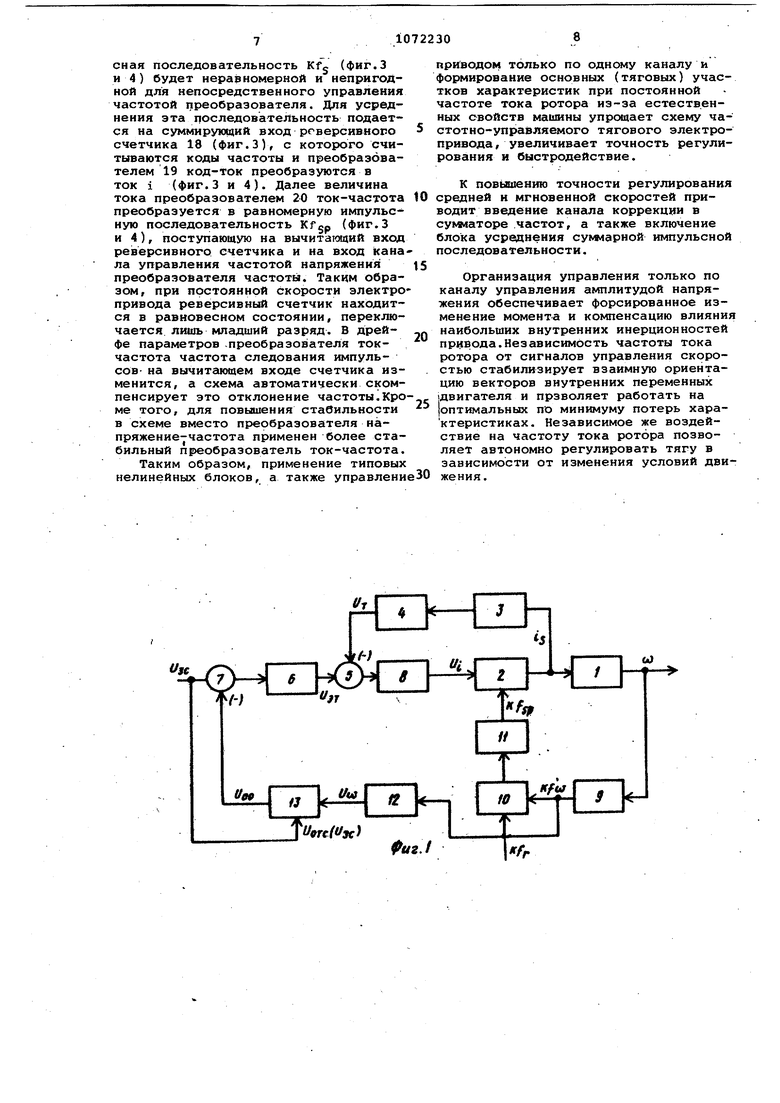
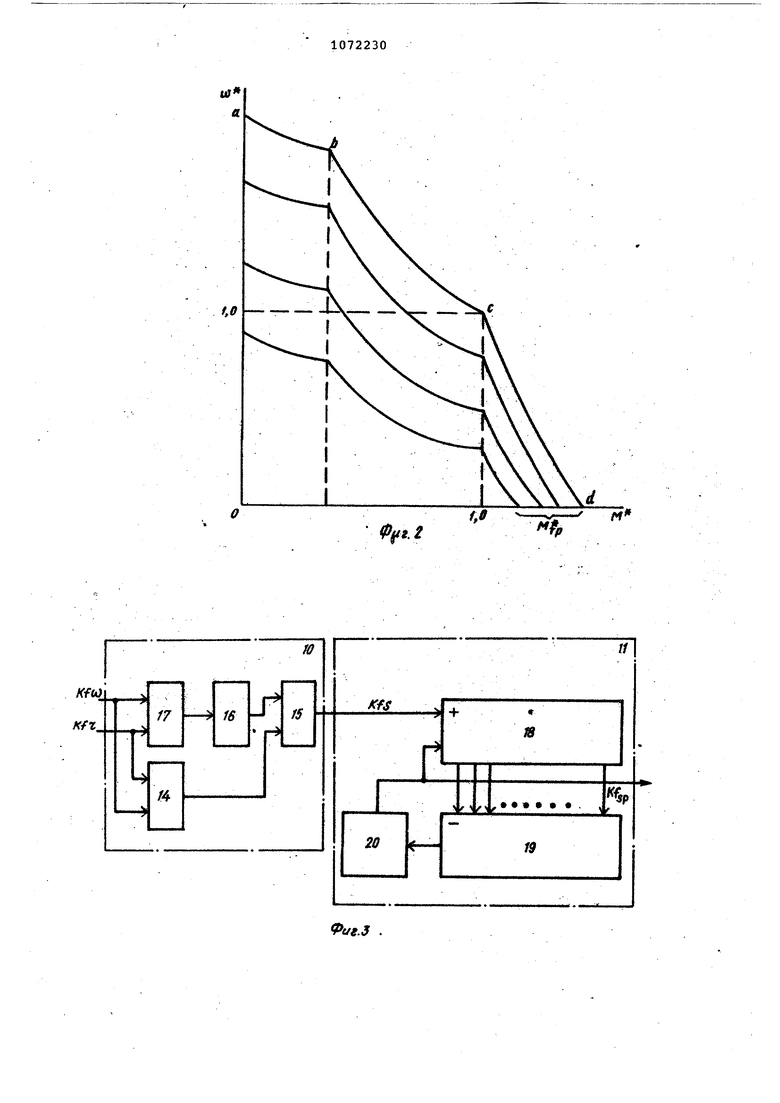
Поставленная цель достигается тем что в частотно-управляемый тяговый электропривод, содержшций асинхронный двигатель, подключенный к преобразователю частоты с каналами управления амплитудой и частотой напряжения, датчик тока двигателя, связанны выходом с первым входом первого блоки суммирования, второй вход которого соединен через регулятор скорости с выходом второго блока суммирования а выход первого блока суммирования через регулятор тока соединен с вхо дом канала управления амплитудой на пряжения преобразователя частоты, импульсный датчик скорости двигателя, выходом, подключенный к первому входу сумматора частоты, выходом св занного с входом канала управления частотой преобразователя частоты, а второй вход сумматора частот соединен с блоком задания частоты тока ротора, кроме того, выход импуль снОго датчика скорости двигателя , через преобразователь частота-напря жение связан с первым входсм второг блока суммирования, второй вход которого соединен с блоком задания скорости, введены нелинейный блок обратной связ« по току, реализующий функцию т Р« s отс i UT K.dg-I), при Ig г Т„,е. управляемый нелинейный блок обратно сзвязи по скорости, реализующий фун цию и„ о,при и UoTc(3c) ос ..). РИ и блок усреднения импульсной последовательности, причем нелинейный бл обратной связи по току соединен вхо дом с вы-ходом датчика тока, и выход связан с первым входом первого блок суммирования, нелинейный блок обрат ной связи по скорости первьол входом соединен с выходом преобразователя Частота-напряжение, а вторым входом связан с выходом блока задания скорости, а выходом подключен к первому входу второго блока суммирования блок усреднения импульсной последов тельности входом соединен с выходом сумматора частот, а выходом подключен к входу канала управления частотой напряжени преобразователя, где и и ос выходные CHrHajmi нелинейных блоков обратной связи по току и скорости, Ig - ток статора, Uju - сигнал скорости, i, - сиг налы ограничения по току и скорости, Ujj - сигнал задания. Кроме того, сумматор частот содержит первую и вторую ячейки ИЛИ, ячейку И, узел временной задержки, блок усреднения импульсной последовательности, реверсивный счетчик, преобразователи код-ток и ток-частота, при этом первый вход первой ячейки ИЛИ связан с блоком задания частоты тока ротора, а вторым входе - с выходом импульсного датчика скорости, вторая ячейка ИЛИ первым входом соединена с выходом первой ячейки ИЛИ, вторым входом через узел временной задержки связана с выходом ячейки И и выходом подключена к суммирующему входу реверсивного счетчика, преобразователь код-ток входами соединен с выходами реверси- вного счетчика, а выходом подключен к входу преобразователя ток-частота, выход преобразователя ток-частота соединен с вычитающим входом реверсивного счетчика и с входом канала управления частотой напряжения преобразователя частоты, при этом первый вход, ячейки И соединен с выходом импульсного датчика скорости а второй вход - с выходс « блока задания частоты тока ротора. На фиг.1 приведена функциональная схема частотно-управляемого тягового электропсшвода; на фиг.2 - семейство механических характеристик электропривода) на фиг.З - функциональная схема сумматора частот и блока усреднения импульсной последовательности} на фиг.4 - диаграммы, поясняющие работу этих блоков. Частотно-управляемый электропривод (фиг.1} содержит асинхронный двигатель 1, подключенный к преобразователю 2 частоты, с каналами управления амплитудой напряжения (тока) U{ и частотой Kfjp датчик 3 тока двигателя через нелинейный блок 4 обратной связи по току соединен с первым входом первого блока 5 суммирования, второй его вход через регулятор 6 скорости связан с выходом второго блока 7 суммирования, а выход первого блока 5 суммирования соединен через регулятор 8 тока с каналом управления амплитудой напряжения преобразователя частоты. Импульсный датчик 9 скорости двигателя выходом подключен к первому входу (Kf) сумматора 10 частот, а второй вход сукматора частот (.Kf) соединен с блоком задания частоты тока ротора (не показан), выход сумматора частот через блок 11 усреднения импульсной последовательности соединен с входом канала управления частотой напряжения (Kf,.J, кроме того, выход импульсного датчика скорости через преобразователь 12 частота-напряжение соединен с первым входом нелинейного блока 1-.3 обратной связи по скорости, второй вход которого связан с блоком задания скорости, а выход соединен с первым входом второго блока 7 суммирования, второй вход которого связан с блоком задания скорости. Сумматор 10 частот (фиг.З) содержит первую ячейку ИЛИ 14, первый вход (Kfj.) которой связан с блоком задания частоты тока ротора, а второй вход (КГц,) - с выходом импульст ного датчика скорости, выход первой
ячейки ИЛИ соединен с первым входом второй ячейки ИЛИ 15, второй вход которой чеэер узел 16 временной задержки соединен с выходом ячейки И 17, первый вход которой соединен с выходом импульсного датчика скорости, а второй - с блоком задания частоты тока ротора, причем выход второй ячейки ИЛИ (Kfg) подключен к входу блока 11 усреднения импульсной последовательности. Блок усреднения импуль сной последовательности содержит резе хзИвный счетчик 18, суммирующим вхо дом подключенный к выходу функционального преобразователе, а выходами соединенный с входами преобразователя 19 код-ток. Выход преобразователя кодток соединен через преобразователь 20 ток-частота с вычитающим входом реверсивного счетчика и с входом канала управления частотой напряжения пре образователя.
Частотно-управляемый тяговый электропривод работает следующим образом.
При подаче на управляющие входы сигнала задания скорости (из) и импульсной последовательности с частотой Kf, пропорциональной требуемой частоте тока ротора, на асинхронный двигатель 1 (фиг.1) с преобразователя частоты 2 будет подано напряжение с частотой fj,H амплитудой, определяемой величиной сигнала задания Скорости и,- . Величина тока статора 1; двигателя начинает нарастать и с выхода датчика 3 тока подается сигнал на вход нелинейного блока 4 обратной связи по току. Однако, пока эффективное значение тока будет меньше величины тока отсечки, определяемого параметрами блока 4, на выходе последнего сигнал будет равен нулю. При достижении Ig .блок 4. открывается и с его выхода на первый вход первого блока 5 суммирования будет поступать сигнал отрицательной обратной связи u-r к j(lg-ljjjj.) где он будет сравниваться с сигнэлом задания тока Ц, поступающего . через регулятор 6 скорости с выхода второго блока 7 суммирования и уже результирующий сигнал через регулятор 8 тока подается на вход канала управления амплитуды преобразователя 2 частоты, что приводит к ограничению величины тока статора на УРОВНЯХ, соответствующих допустимым моментам трогания двигателя (.2 ), Привод начнет разгоняться на участках Сд(фиг.2) в режиме ограничения максимального момента. При развороте двигателя 1 на выходе импульсного датчика 9 скорости (фиг.) начнет формироваться импульсная последовательность с частотой КГц,, пропорциональная скорости вращения двигателя. Эта последовательность суммируется в сумматоре 10 частот с
импульсной последовательностью частоты тока ротора Kf и уже результирующая импульсная последовательность через блок 11 усреднения импульсной последовательности поступает на вход канала управления частотой напряжения преобразователя (Kf ) По мере разгона привода частота на входе преобразователя частоты воз-растает, а величина тока статора Ij уменьшается. При снижении величины тока
блок 4 отключает канал
до Is I
с тс
обратной связи по току, а привод переходит в режим формирования тяговых характеристик (участки Ъс, фиг.2 В этом режиме оба канала обратных связей разомкнуты. При снижении момента нагрузки скорость привода будет нарастать, при этом на выходе преобразователя 12 частота-напряжение (фиг.1) будет увеличиваться сигнал Цд . При увеличении скорости до уровня, соответствующего U Uj(Uj ), нелинейный блок 13 замкнет цепь обратной связи по скорости и подаст сигнал Uo.K U -иот-с( на первый вход второго блока 7 суммирования. Электропривод будет работать на участках аЬ механических характеристик (фиг.2) в режиме ограничения скорости. Для того, чтобы на каждой частичной характеристике семейства ограничивать скорость на уровне, соответствующем сигналу задания, уровень эталонного напряжения блока 13 W 1,) перестраивается в зависимости от уровня сигнала задания скорости.
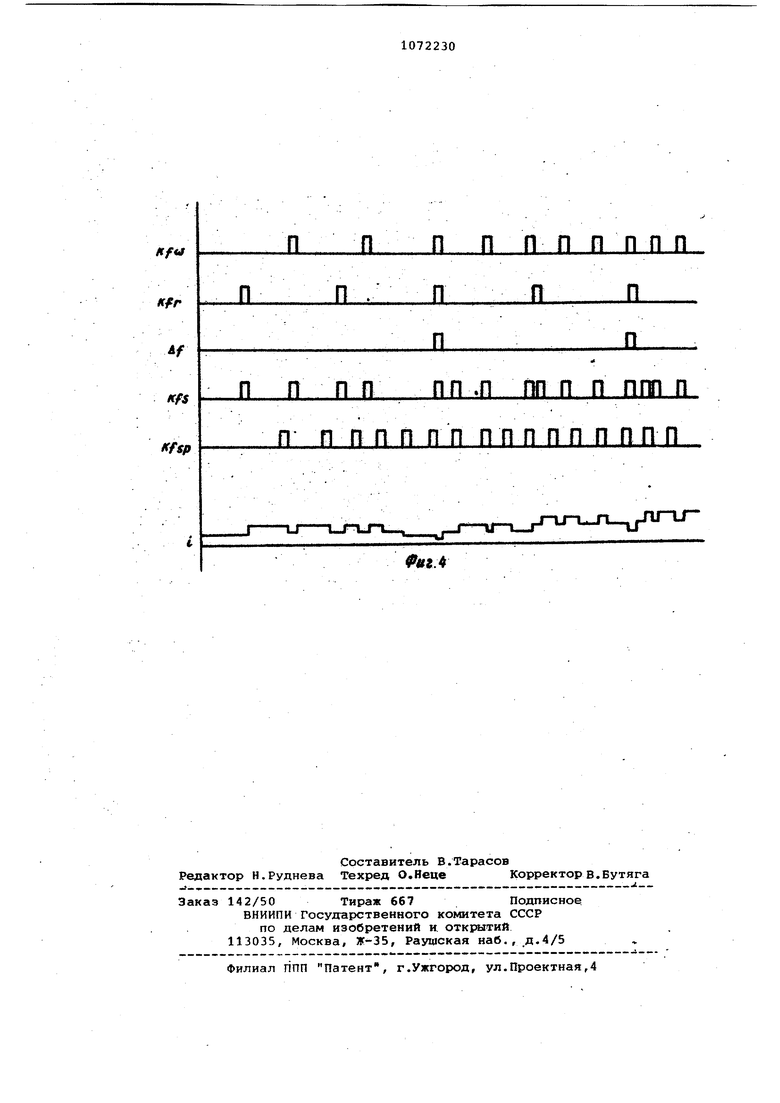
Суммирование двух импульсных последовательностей в сумматоре 10 частот (фиг.1 и 3) и усреднение суммарной последовательности в блоке 11 (фиг.З) осуществляется следующим образом. Для этого импульсные последовательности с частотами Kf и Kfft (фиг.З и 4) подаются на первый и второй входы первой ячейки ИЛИ 14 (), где импульсы одной последовательности вписываются между импульсами другой последовательности и через вторую ячейку ИЛИ 15 (фиг.З) поступают на выход сумматора частот. Однако при совпадении импульсов во времени будет потеряна информация о частоте на величину дг (фиг.4), что особенно ощутимо на низких скоростях. Для исключения этого явления на второй вход второй ячейки ИЛИ 15 через узел 16 временной задержки с выхода ячейки И 17 подаются импульсы коррекции, формируемые при совпадении на-входе ячейки И импульсов суммируемых последовательностей. Импульсы коррекции сдвигаются на интервал .узлом 16 времеиной задержки и вписываются в суьадарную последовательност второй ячейкой ИЛИ 15. Однако на выходе этой ячейки суммарная импульсная последовательность Kfg (фиг.З и 4) будет неравномерной и непригодной для непосредственного управления частотой преобразователя. Для усреднения эта последовательность подается на суммирующий вход реверсивного счетчика 18 (фиг.З), с которого считываются коды частоты и преобразователем 19 код-ток преобразуются в ток i (фиг.З и 4). Далее величина тока преобразователем 20 ток-частота преобразуется в равномерную импульс ную последовательность (фиг.З и 4), поступающую на вычитатоздий вход ре)зерсивного счетчика и на вход кана ла управления частотой напряжения преобразователя частоты. Таким образом, при постоянной скорости электро привода реверсивный счетчик находится в равновесном состоянии, переключается лишь младший разряд. В дрейфе параметров -преобразователя токчастота частота следования импульсов- на вычитающем входе счетчика изменится, а схема автоматически скомпенсирует это отклонение частоты.Кро ме того, для повышения стабильности в схеме вместо прербразователя напряжение-частота применен более стабильный преобразователь ток-частота. Таким образом, применение типовых нелинейных блоков, а также управлени приводом только по одному каналу и формирование основных (тяговых) участков характеристик при постоянной частоте тока ротора из-за естественных свойств машины упрощает схему частотно-управляемого тягового электропривода , увеличивает точность регулирования и быстродействие. К повьвиению точности регулирования средней и мгновенной скоростей приводит введение канала коррекции в сумматоре частот, а также включение блока усреднения суммарной импульсной последовательности. Организация управления только по каналу управления амплитудой напряжения обеспечивает форсированное изменение момента и компенсацию влияния наибольших внутренних инерционностей привода.Независимость частоты тока ротора от сигналов управления скоростью стабилизирует взаимную ориентацию векторов внутренних переменных швигателя и прзволяет работать на оптимальных по минимуму потерь характеристиках. Независимое же воздействие на частоту тока ротора позволяет автономно регулировать тягу в зависимости от изменения условий движения.
u a
f.o
Г
fff
u
/5
/7
16
J
/4
.3 .
w
fg
11
+
.
f
W n n n n n n n n n n n n ПП
ФигА n n n n n n n .n m n n nm n n n n n n n n n n
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1978 |
|
SU752722A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ № 1563228, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
