W
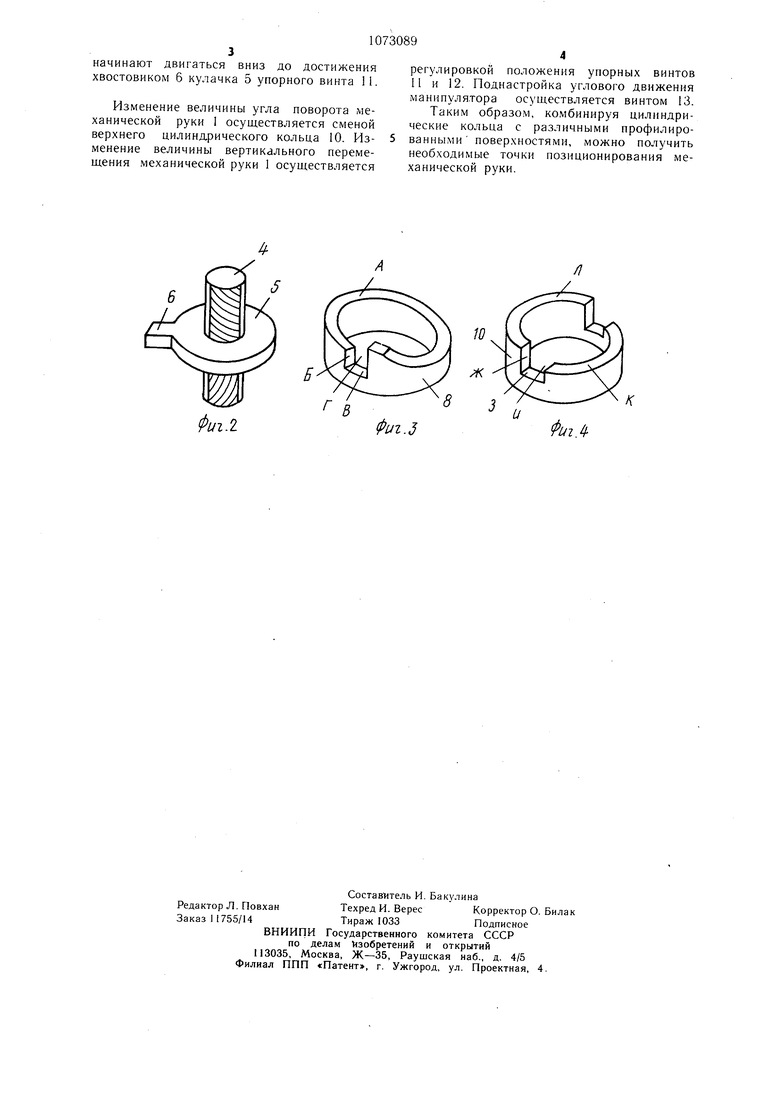
Фиг.1 1 Изобретение относится к машиностроению и может быть использовано для создания робототехнологических комплексов в различных отраслях народного хозяйства. Известен манипулятор, содержащий основание со смонтированными на нем регулируемыми упорами и механическую руку, установленную на приводном валу 1. Недостатками известного манипулятора являются большие габаритные размеры и низкая точность позиционирования. Целью изобретения является уменьшение габаритных размеров и повышение точности позиционирования. Поставленная цель достигается тем, что манипулятор, содержащий основание со смонтированными на нем регулируемыми упорами и механическую руку, установленную на приводном валу, снабжен кулачковым валиком, имеющим на своих концах резьбу противоположного направления, при этом один конец кулачкового валика связан с приводным валом, а другой - с механической рукой, причем регулируемые упоры выполнены в виде цилиндрических колец, имеющих профилированные торцовые поверхности, и установлены таким образом, что одно из них взаимодействует с кулачком кулачкового валика, а другое - с механической рукой. На фиг. 1 схематично изображен общий вид манипулятора в разрезе; на фиг. 2 - кулачковый валик; на фиг. 3 - первое цилиндрическое кольцо (регулируемый упор); на фиг. 4 - второе цилиндрическое кольцо (регулируемый упор). Манипулятор содержит механическую руку 1 с исполнительным органом (захватом) 2. Механическая рука 1 соединена с приводным валом 3 посредством промежуточного элемента, выполненного в виде кулачкового валика 4. Кулачковый валик 4 имеет расположенный в средней части кулачок 5 с хвостовиком 6, а на свободных концах валика выполнена многозаходная резьба. Причем направление резьбы на одном конце кулачкового валика 4 противоположно направлению ее на другом конце. При этом один конец кулачкового валика 4 связан с приводным валом 3, а другой - с механической рукой 1. Выполнение резьбы многозаходной необходимо для увеличения поступательного движения контактирующих пар при определенном угле поворота). Регулируемые упоры установлены на корпусе 7 манипулятора и выполнены в виде цилиндрических колец, имеющих профилированные торцовые поверхности. 1Дилиндрическое кольцо 8 установлено непосредственно на корпусе 7. Кроме того, на корпусе 7 устанавливается кронштейн 9, на котором расположено цилиндрическое кольцо 10. Цилиндрическое кольцо 8 имеет профилированную торцовую поверхность А, на боковой поверхности цилиндрического кольца выполнен паз с поверхностя.ми Б, В и Г, причем высота ifoверхности Г больше, чем высота поверхности Б. В пазу установлен упорный винт 11. Цилиндрическое кольцо 8 взаимодействует с хвостовиком 6 кулачка 5 кулачкового валика 4. На боковой поверхности цилиндрического кольца 10 выполнены два паза Д и Е, причем каждый из них имеет поверхности Ж, 3 и И. Профилированная торцовая поверхность А цилиндрического кольца 10 выполнена из двух участков К и Л, имеющих разные уровни; поверхность К находится ниже поверхности Л. В пазу Д на поверхности 3 установлен упорный винт 12. Цилиндрическое кольцо 10 взаимодействует с механической рукой 1. С боковой наружной поверхностью цилиндрического кольца 10 контактирует винт 13, который служит для поворота кольца вокруг оси. Приводной вал 3 связан с двигателем (не показан), сообщающим валу реверсивное движение. Манипулятор работает следующим образом. В исходном положении хвостовик 6 кулачка 5 находится в пазу цилиндрического кольца 8, а механическая рука 1 - в пазу Е цилиндрического кольца 10. Приводному валу 3 сообщается периодическое вращательное движение. При вращении приводного вала 3 по часовой стрелке хвостовик 6 кулачка 5 скользит по поверхности Б паза цилиндрического кольца 8. При этом кулачковый валик 4 и механическая рука i поднимаются вверх. При выходе хвостовика 6 кулачка 5 и механической руки 1 из своих пазов начинается поворот механической руки 1, в направлении вращения вала 3. При этом хвостовик 6 кулачка 5 скользит по поверхности А цилиндрического кольца 8, а механичеекая рука поворачивается по поверхности К до достижения ею поверхности Ж цилиндрического кольца 10. Так как поверхность Л выше поверхности К, то механическая рука 1, достигнув поверхности Ж, движется вниз до упорного винта 12 за счет того, что механическая рука 1 связана с кулачковым валиком с помощью многозаходной резьбы. При достижении механической рукой 1 упорного винта 12 приводному валу 3 сообщается вращение в обратном направлении. При этом механическая рука 1 поднимается вверх, достигает поверхности К и начинает поворот. Поворот механической руки 1 продолжается до достижения хвостовиком б кулачка 5 поверхности Г паза цилиндрического кольца 8. При этом механическая рука 1 достигает паза Е. Далее кулачковый валик 4 и механическая рука 1
начинают двигаться вниз до достижения хвостовиком 6 кулачка 5 упорного винта 11.
Изменение величины угла поворота механической руки I осуществляется сменой верхнего цилиндрического кольца 10. Изменение величины вертикального перемещения механической руки 1 осуществляется
регулировкой положения упорных винтов 11 и 12. Поднастройка углового движения манипулятора осуществляется винтом 13. Таким образом, комбинируя цилиндрические кольца с различными профилированными повер.хностями, можно получить необходимые точки позиционирования механической руки.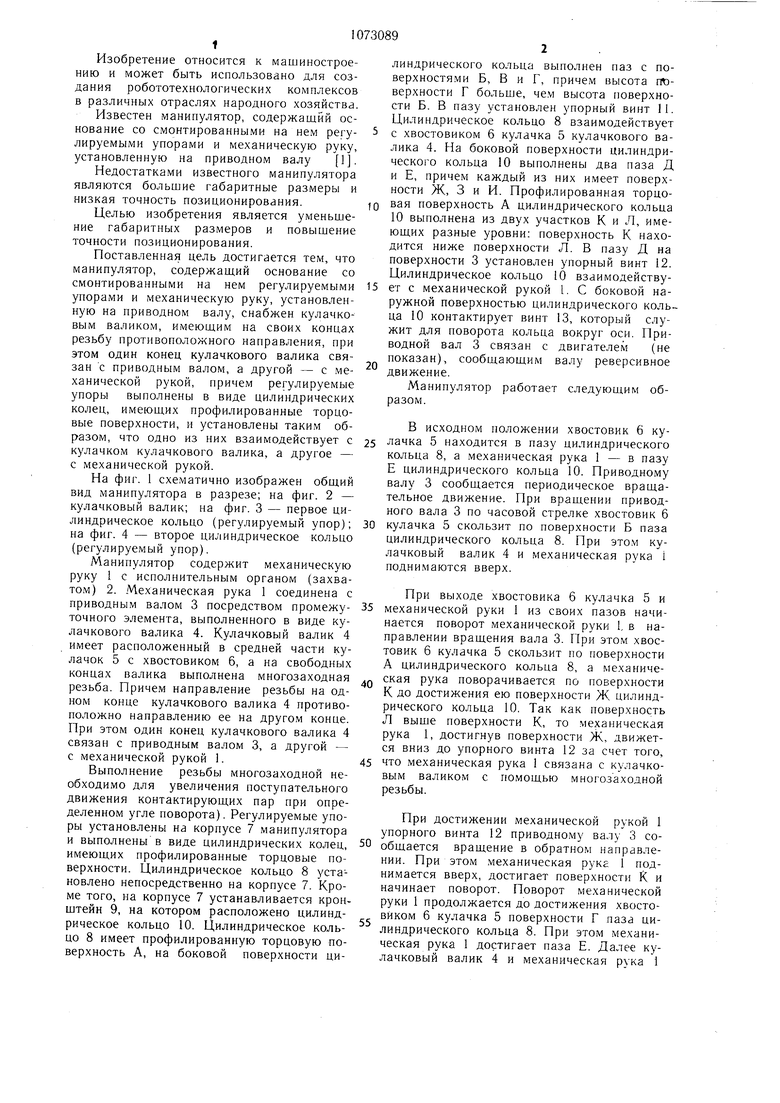
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268401C2 |
| Манипулятор | 1986 |
|
SU1437213A1 |
| Устройство для накатки кольцевых канавок на трубчатых заготовках | 1983 |
|
SU1133000A1 |
| ОБРАТНЫЙ ПОВОРОТНЫЙ ЗАТВОР (ВАРИАНТЫ) | 2012 |
|
RU2514452C1 |
| Устройство разгрузки винтового погружного насоса и его подшипниковый узел, узел торцевых уплотнений, предохранительный узел клапанов и кулачковая муфта | 2017 |
|
RU2672994C1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2044628C1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
МАНИПУЛЯТОР, содержащий основание со смонтированными на нем регулируемыми упорами и механическую руку, установленную на приводном валу, отличающийся тем, что, с целью уменьшения габаритных размеров и повышения точности позиционирования, он снабжен кулачковым валиком, имеющим на своих концах резьбу противоположного Р1аправления, при этом один конец кулачкового валика связан с приводным валом, а другой - с механической рукой, причем регулируемые упоры выполнены в виде цилиндрических колец, имеющих профилированные торцовые поверхности, и установлены таким образом, что одно из них взаимодействует с кулачком кулачкового валика, а другое - с механической рукой.
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
