28 ff 13 1719
4
К
с
1
Изобретение относится к мавшно- строению и может быть использовано для передачи обрабатьшаемых изделий с одной технологической позихщи на другую.
Цель изобретения расширение технологических возможностей за счет уменьшения погрешности позиционирования при одновременном увеличении диапазона регулирования величины хода захватньтх устройств.
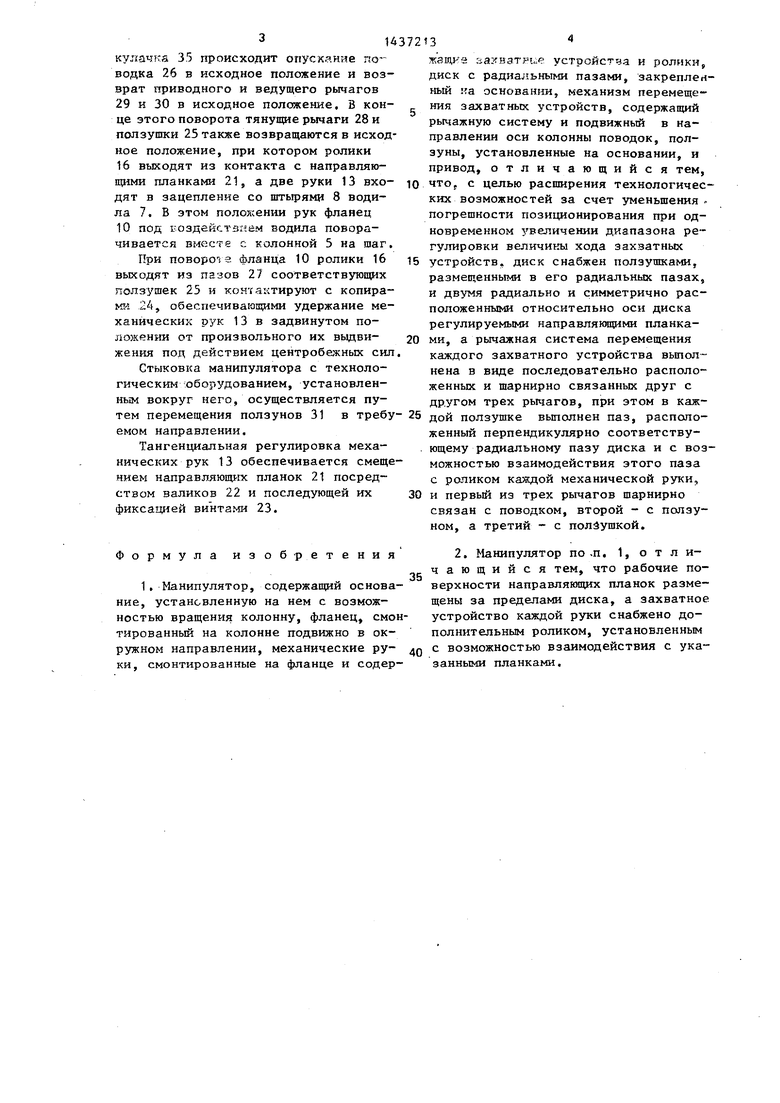
На фиг. 1 показан манипулятор,, продольный разрез; на фиг, 2 - вид А на фиг, 1{ на фиг. 3 - разрез Б-Б на фиг, 2| на фиг. 4 - захватное устройство в задвинутом положении; на фиг. 5 - то же, в выдвинутом пололсеНИИ .
Манипулятор содержит основание Ij на котором посредством ребер 2 закреплен цилиндрический корпус 3, вну три которого на подшипниках 4 установлена колонна 55 связанная через зубчатое колесо 6 с приводом.
В верхней части колонны 5 закреплено водило 7 с двумя штьгря 1И 8 и смонтирована подшипниковая опора 9,, на которойустановлен фланец 10 на торце 11 которого выполнены в виде пазов радиальные направляющие 12„ В кшадой направляющей 12 смонтирована механическая рука О с захватные.; устройством 14 и пальцем 15 с роликом 16
На торце 11 фланца 10 закреплено кольцо 17, под которым размещен на основании 1 диск 18, в котором по числу рук выполнены открьп ые радиальные
пазы 19.
На обращенном в сторону фланца 10 торце 20 диска 18 установлены две на- правляюп ие планки 21, калсдая из кото рык соединена с диском посредством двух эксцентриковых валиков 22 и винтов 23 На торце 20 между радиальными па- зами 19 закреплены копиры 24.
Манипулятор -содержит механизм горизонтального перемещения захватных устройств, включающий ползушки 25, систему рычагов и поводок 26, Ползушки 25 установлены в радиальных пазйх 19
и имеют сквозные пазы 27 выполненные перпендикулярно осям соответствуюп(их пазов в диске 18, Дно пазов 27 расположено в одной плоскости с торцом 20 диска 18.
Каждая ползушка 25 соединена с поводком 26 посредством шарнирно свя- занньпс между собой тянущего рычага
10
20
25
45
372132
28,, ведуш.его рьтага 29 и приводного рычага 30. Каждый тяну1ций рычаг одним концом шарнирно закреплен на ползуш- 5 ке. Каждый из ведущих рычагов шарнирно установлен на ползуне 31, смонтированном на основании 1 с возможностью радиального перемещения посред ством регулировочного 32 и крепежного 33 винтов. Все приводные рычаги 30 шарнирно закреплены на поводке 26, который расположен с возможностью осевого перемещения и нижней части цилиндрического корпуса 3 и оснащен 15 роликом 34, размещенным в пазу кулачка 35, закрепленного на колонне 5,
Направля гадие планки 21 могут быть закреплены за пределами диска 18 и расположены симметрично, а каждое захватное устройство 14 снабжено роликом 36,
Манипулятор работгет следуюшдм образом.
В исходном положении механические руки 13 с захватными устройствами 14 задвинуты, в радиальные направляющие
12фг анца 10 таким образом, что две противоположно расположенные руки входкт в зацепление со штырями 8 водила 7. При этом ролик 16 каждой руки ,13 расположен в пазу 27 соответствующей ползушки 25.
После включения привода колонна 5 и кулачок 35 приводятся во вращение. Под действием водила 7 фланец 10 совершает совместное вращение с колонной 5, а под действием кулачка 35 поводок 26 перемещается вверх по неподвижному корпусу 3 и поворачивает приводные и ведущие рычаги 29 и 30. В процессе повороту этих рычагов происходит радиальное перемещение тяну- Eij-ix рычагов 28 и ползушек 25 в пазах 19 диска 18, В результате этого происходит выдвиясение механических рук
13с захватными устройствами 14 и выход их из зацепления со штырями 8 водила 7, что обеспечивает разъединение фланца 10 с колонной 5.
При выходе из зацепления с води- лом 7 механических рук 13 ролики 16 двух из них входят в контакт с направляющими планками 21, обеспечивающими точную установку фланца 10, а следовательно, и всех направляюшз1х 12 и исключаюш,ими возможность проворота фланца вокруг колонны 5.
После выполнения технологических операций под действием вращающегося
30
35
40
50
55
314
кулачка 35 происходит опускание по-- водка 26 в исходное положение и возврат приводного и ведущего рычагов 29 и 30 в исходное положение, В конце этого поворота тянущие рьгчаги 28 и ползушки 25 также возвращаются в исходное положение, при котором ролики 16 выходят из контакта с направляю- цими планками 21, а две руки 13 вхо- дят в зацепление со штьфямн 8 водила 7. В этом положении рук фланец 10 под воздействием водила поворачивается вместе с колонной 5 на шаг.
При поворо е фланца 10 ролики 16 выходят из пазов 27 соответствующих ттолзушек 25 и контактируют с копирами 24, обеспечивающими удержание механических рук 13 в задвинутом положении от произвольного их выдви- жения под действием центробежных сил
Стыковка манипулятора с технологическим оборудованием, установленным вокруг него, осуществляется путем перемещения ползунов 31 в требу емом направлении.
Тангенциальная регулировка механических рук 13 обеспечивается смещением направляющих планок 21 посредством валиков 22 и последующей их фиксацией винтами 23,
35
Формула изобретения
1, Манипулятор, содержащий основание, установленную на нем с возможностью вращения колонну, фланец, смонтированный на колонне подвижно в окружном направлении, механические ру- Q ки, смонтированные на фланце и содер
5 0
5
О
5
Q
13
жащиа за ватрыр устройстча и ролики, диск с радиальными пазами, закрепленный иа основании, механизм перемещения захватных устройств, содержащий рычажную систему и подвижный в направлении оси колонны поводок, ползуны, установленные на основании, и привод, отличающийся тем, что5 с целью расщирения технологических возможностей за счет уменьшения, погрешности позиционирования при одновременном увеличении диапазона регулировки величины хода захватных устройств, диск снабжен ползушками, размещенными в его радиальных пазах, и двумя радиально и симметрично расположенными относительно оси диска регулируемыми направляющими планками, а рычажная система перемещения каждого захватного устройства выполнена в виде последовательно расположенных и щарнирно связанных друг с другом трех рычагов, при этом в каждой ползушке выполнен паз, расположенный перпендикулярно соответствующему радиальному пазу диска и с возможностью взаимодействия этого паза с роликом каждой механической руки, и первый из трех рычагов щарнирно связан с поводком, второй - с ползуном, а третий - с полпушкой.
2. Манипулятор по-п. 1, отличающийся тем, что рабочие поверхности направляющих планок размещены за пределами диска, а захватное устройство каждой руки снабжено дополнительным роликом, установленным с возможностью взаимодействия с указанными планками.
Вад.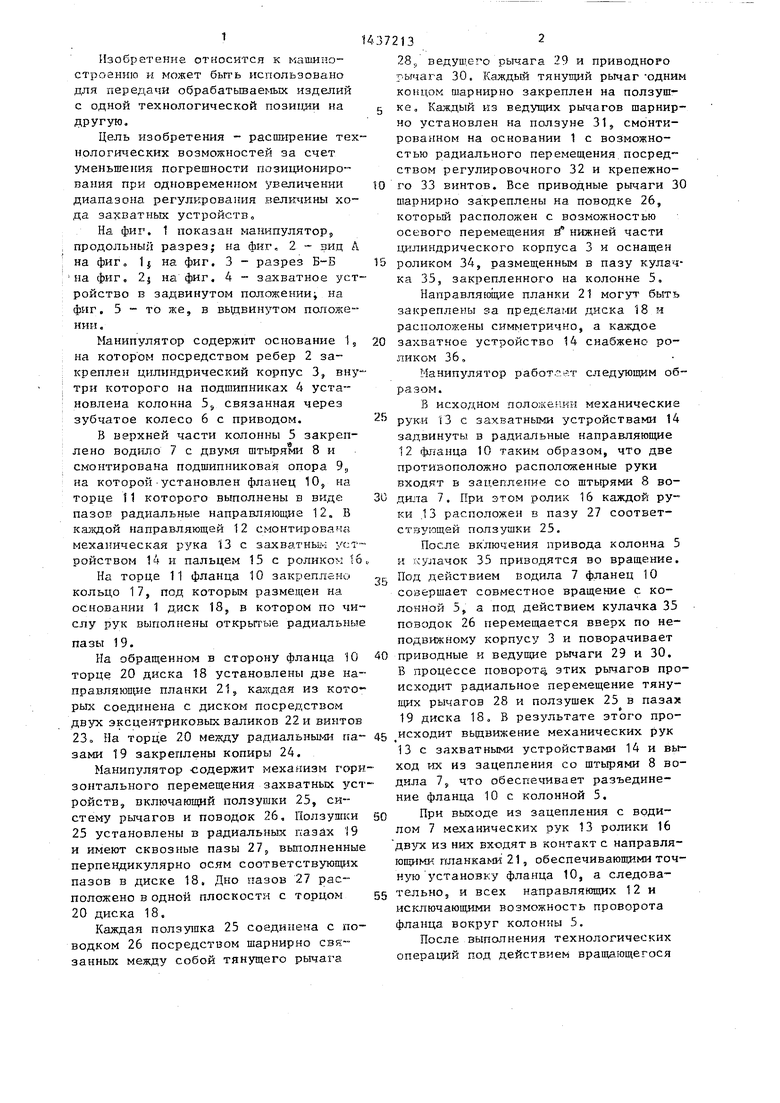
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1395477A2 |
| Манипулятор | 1984 |
|
SU1222536A1 |
| Устройство для обработки поверхностей сложной формы | 1986 |
|
SU1424987A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для ротационного резания | 1981 |
|
SU956161A2 |
| Автооператор для подачи плоских заготовок в обрабатывающую машину | 1988 |
|
SU1539082A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Автомат для зачистки острых кромок | 1984 |
|
SU1220745A1 |
| Манипулятор | 1988 |
|
SU1569223A1 |

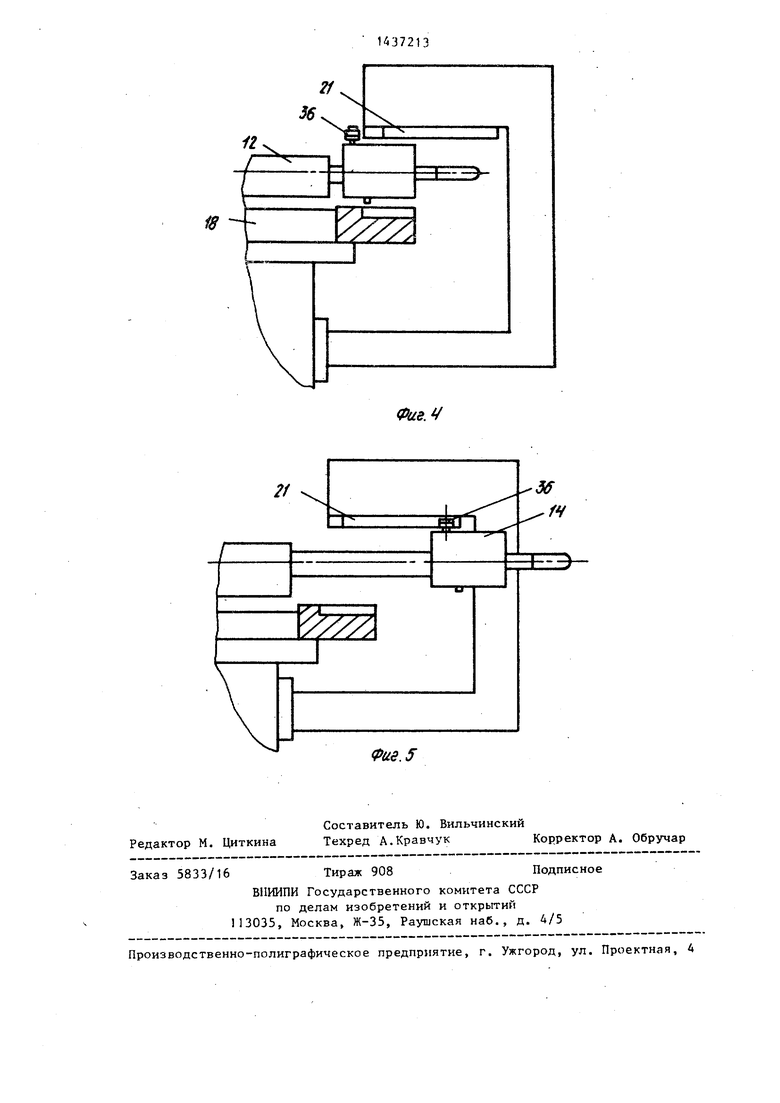
Изобретение относится к области машиностроения и может быть использовано для передачи обрабатываемых изделий с одной технологической позиции на другую. Цель изобретения - расширение технологических возможностей за счет уменьшения погрешности позиционирования при одновременном увеличении диапазона регулирования величины хода захватных устройств. При враш,ении колонны 5, смонтированной на основании 1, посредством рычагов 28-30 перемещаются в радиальном направлении захватные устройства 14 механических рук 13. 1 з.п. ф-лы, 5 ил.
1
IS
Фт.2
12
21
..
f
;.
«lue.V
56 f f
V
Фие.5
| Манипулятор | 1984 |
|
SU1222536A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
