(54) ПРОМЫШЛЕННЫЙ РОБОТ
I
Изобретение относится к машинострое нию и может быть использовано для создания робото-технологических комплексов в различных отраслях народного хозяйства.
Известен промышленный робот, содержап1ий основание, механические руки и их приводы в виде зубчато-реечной передачи и силовых цилиндров, а также регулируемые упоры 1 .
Недостатком такого промышленного робота является наличие за каждым силовым цилиндром управляюшего цилиндра большего тягового усилия, что требует дополнительных устройств для управления и усложняет конструкцию. Кроме того, расположение силовых и- управляюш,их цилиндров последовательно друг за другом увеличивает габариты устройства и затрудняет его размешение возле обслуживаемого оборудования.
Цель изобретения - уменьшение габаритов и упрошение конструкции промышленного робота.
Поставленная цель достигается тем, что основание снабжено направляюшей, рейка первой зубчато-реечной передачи жестко закреплена на корпусе одного силового цилиндра, а рейка второй зубчато-реечной передачи расположена в направляющей и снабжена дополнительным зубчатым венцом, который входит в зацепление с шестерней первой зубчато-реечной передачи, причем эта шестерня шарнирно закреплена на корпусе второго силового цилиндра, а сами силовые цилиндры выполнены каждый с двухсторонними штоками, жестко закрепленными на корпусе.
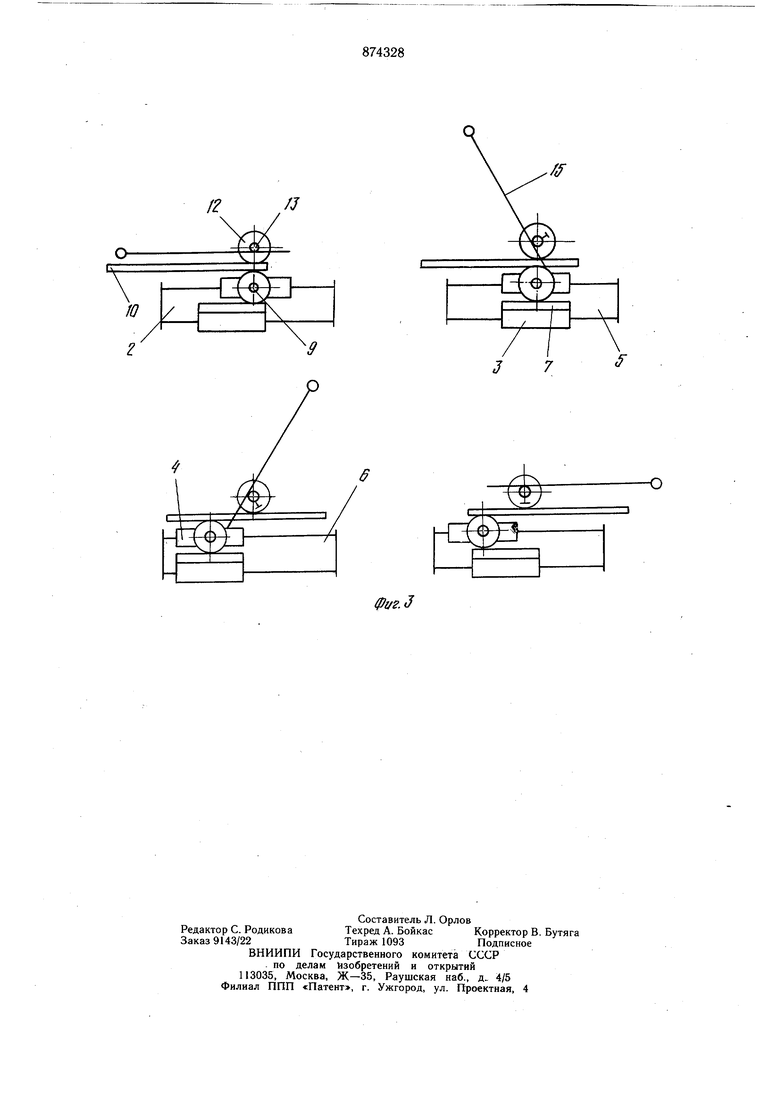
На фиг. 1 схематично изображен промышленный робот, обш,ий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - цикл угловых положений руки промышленного робота. Промышленный робот содержит основание 1 с установленным на нем устройством 2 поворота, которое состоит из пары силовых цилиндров 3 и 4 равного хода, выполненных с двухсторонними штоками 5 и 6, концы которых жестко закреплены на основании 1. На силовом цилиндре 3 жестко закреплена рейка 7, находящаяся в зацеплении с шестерней 8, шарнирно закрепленной на оси 9,
20 которая жестко закреплена на силовом цилиндре 4. Шестерня 8, кроме -этого, зацепляется с рейкой 10, установленной в направляющих 11. Рейка 10, в свою очередь, дополнительным зубчатым венцом сцеплена с шестерней 12 зубчато-реечной передачи, смонтированной на валу 13, который заделан в корпус 14 и имеет руку 15 с захватным органом 16. Для поворота руки 15 на максимальный угол длина дополнительного зубчатого венца рейки 10 равна трехкратной величине хода одного из силовых цилиндров. Для регулирования расстояния между точками позиционирования и безударной остановки на основании 1 в зоне действия силовых цилиндров 3 и 4 установлены регулируемые упоры 17, снабженные демпферами 18 и датчиками 19 конечных положений.
Предлагаемая конструкция позволяет обеспечить минимально необходимые функции промышленного робота. При этом функциональные возможности могут быть расширены добавлением устройств (модулей) вертикальных и горизонтальных линейных перемешений.
Промышленный робот работает следующим образом.
На основании 1 устанавливают в требуемое положение регулируемые упоры 17. В противоположные рабочие полости силовых цилиндров 3 и 4 подают давление и устанавливают их ассиметрично друг другу (фиг. 2). Рабочую полость силового цилиндра 3, находящуюся под давлением, сообщают с атмосферой, а в противоположную полость подают давление. Силовой цилиндр 3 перемещается по штоку 5 и перемещает установленную на нем рейку 7, которая при перемещении вращает щестерню 8 вокруг оси 9. Шестерня 8, вращаясь, воздействует на дополнительный зубчатый венец рейки 10 и передвигает ее в направляющих 11. При движении рейка 10 своим основным зубчатым венцом взаимодействует с шестерней 12 и поворачивает ее вместе с валом 13 и рукой 15 относительно корпуса 14. Поворот руки 15 происходит до тех пор, пока силовой цилиндр 3 не дойдет до соответствующего ему регулируемого упора, при этом демпфер 18 плавно гасит скорость, а датчик конечных положений 19 сигнализирует, что рука 15 с захватным органом 16 пришла в заданное точное положение.
Рабочие полости силовых цилиндров 3 и 4, находящиеся под давлением, сообщают с атмосферой, а соседние - с источником сжатого воздуха. Силовые цилиндры 3 и 4
перемещаются по штокам 5 и 6 в одном направлении. Шестерня 8 обкатывает рейку 7 и вращается в первоначальном направлении от взаимодействия с дополнительным зубчатым венцом рейки 10, перемещая ее в
прежнем направлении. Рука 15 при этом поворачивается относительно корпуса 14 на следующую промежуточную позицию до момента соприкоснования силовых цилиндров 3 и 4 с регулируемыми упорами 17. Далее рабочую полость силового цилиндра 3, находящуюся под давлением, сообщают с атмосферой, а в соседнюю подают давление. Силовой цилиндр 3 перемещается в обратном направлении и описанным выше образом переводит руку 15 с захватным органом 16
в конечное положение.
Таким образом, комбинируя поочередную и совместную подачу сжатого воздуха в те или иные рабочие полости силовых цилиндров 3 и 4, можно получить четыре точки позиционирования руки 15 по углу поворота
(фиг. 3). При необходимости, прибегнув к иным комбинациям подачи давления в силовые цилиндры, можно получить две или три точки позиционирования.
Формула изобретения
Промышленный робот, содержащий основание со смонтированными на нем регулируемыми упорами, механическую руку и
0 ее привода в виде двух зубчато-реечных передач и пары силовых цилиндров, отличающийся тем, что, с целью уменьшения габаритов и упрощения конструкции, основание снабжено направляющей, рейка первой зубчато-реечной передачи жестко закреплена на корпусе одного силового цилиндра, а рейка второй зубчато-реечной передачи расположена в направляющей и снабжена дополнительным зубчатым венцом, который входят в зацепление с шестерней пер1вой зуб0 чато-реечной передачи, причем эта шестерня шарнирно закреплена на корпусе второго силового цилиндра, а сами силовые цилиндры выполнены каждый с двухсторонними штоками, жестко закрепленными на корпусе.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 503712, кл. В 25 J 9/00, 04.09.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU776912A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Промышленный робот | 1986 |
|
SU1313689A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Устройство для захвата деталей | 1979 |
|
SU795942A1 |

п
//
2
J 7
