Изобретение относится к машиностроению, в частности к манипуляторам для перегрузки изделий с позиции на позицию, и может быть использовано в других отраслях народного хозяйства
Цель изобретения - повышение производительности за счет организации перегрузки изделий в два потока
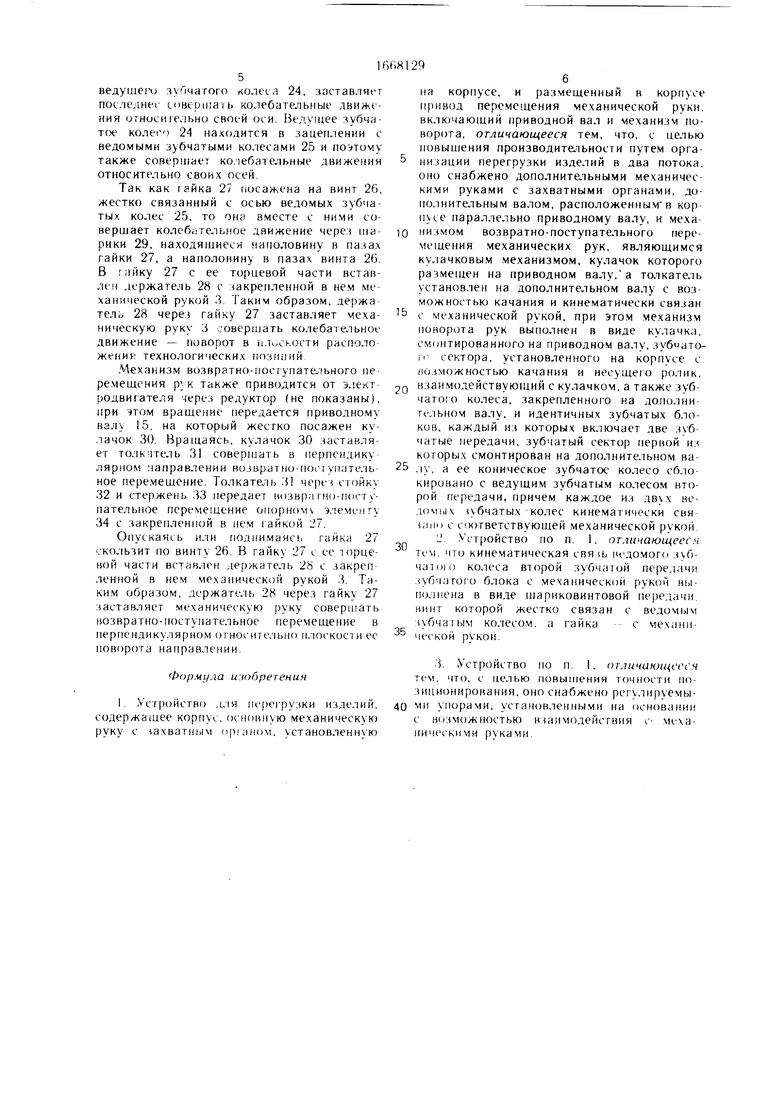
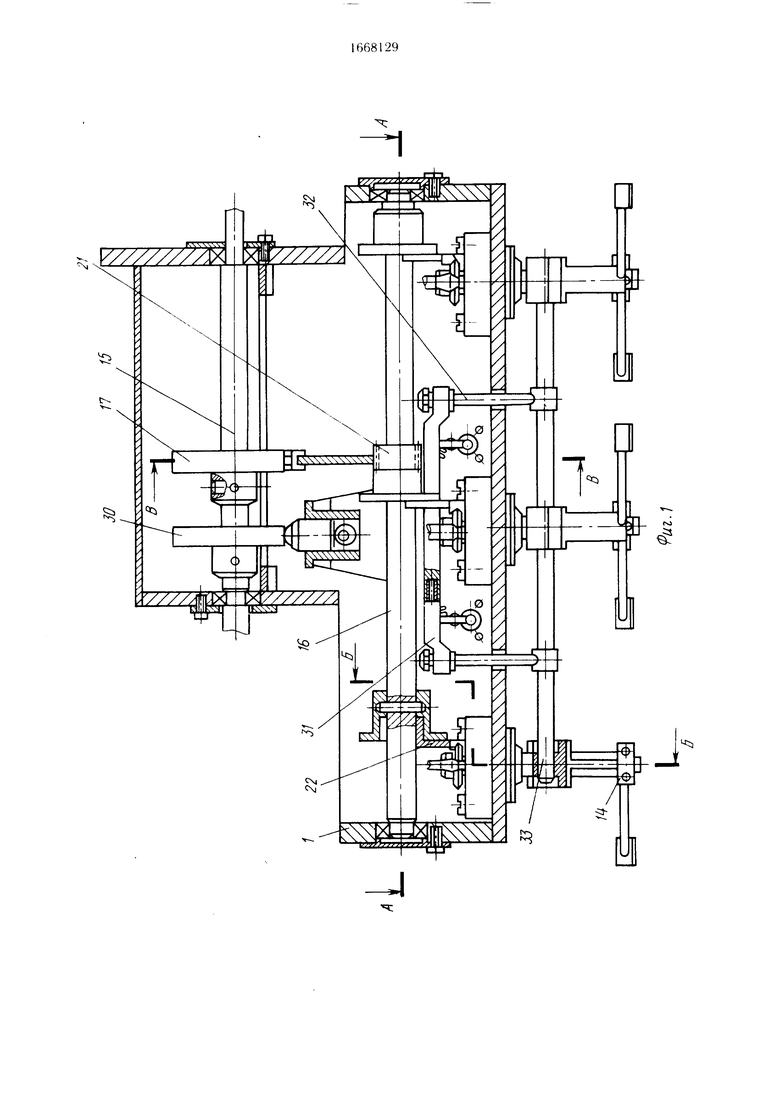
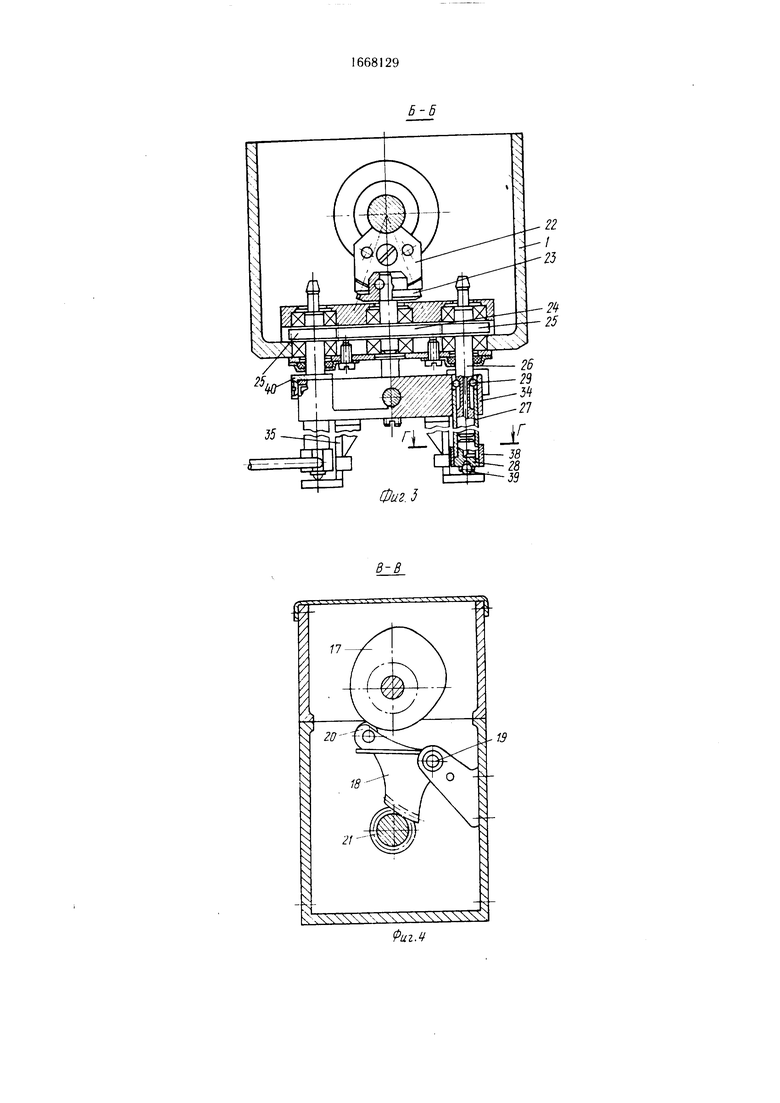
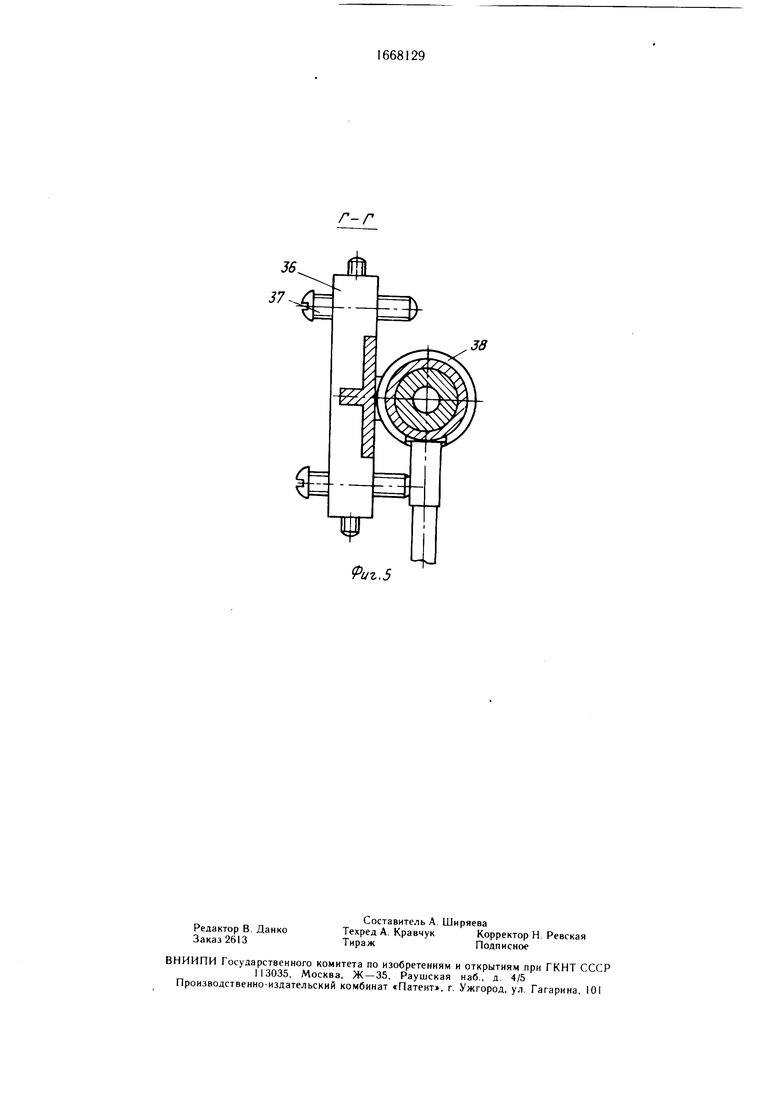
На фиг 1 изображено устройство, общий вид в разрезе; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг 1, на фиг. 4 - сечение В -В на фиг 1; на фиг. 5 - сечение Г -Г на фиг. 3.
Устройство состоит из корпуса 1,основной 2 и дополнительных 3-7 механических рук. несущих захватные устройства 8-13, приво
ja персмс и.ения механических рук. а также ри. лирчемых упоров 14, установленных на корпусе 1, для фиксации положения любой из механических рук Привод перемещения механических рук coiionT m двигателя (не показан), выходной вал которого связан с приводным валом 15, дополнительного ва.м 16. становленного в корпусе I пара.пель- но приводному валу 15, и из механизмов поворота и возвратно-поступательного перемещения механических рук.
Механизм поворота механических рук вы полней в виде кулачка 17, закрепленно to на приводном валу 15, зубчатого сектора 18, установленного на оси 19. закрепленной на корпусе 1. и несущего poобь оо
ND
CD
лик 20, взаимодействующий с кулачком 17, а также зубчатого колеса 21, размещенного на дополнительном валу 16, и трех идентичных зубчатых блоков, каждый из зубчатых блоков состоит из двух зубчатых передач, первая из которых включает зубчатый сектор 22, размещенный на дополнительном валу 16, и коническое зубчатое колесо 23, сблокированное с ведущим зубчатым колесом 24 второй зубчатой передачи Причем каждое из двух ведомых зубчатых колес 25 связано с механической рукой посредством шариковинтовой передачи Винт 26 той передачи жестко связан с осью ведомого зубчатого колеса 25, а 1аика 27 жестко связана с держателем 28 механической руки
Винт 26 выполнен в виде оси с тремя продольными пазами, расположенными под viлом 120 Гайка 27 выполнена в виде втулки с тремя отверстиями, также расположенными под углом 120°, причем шарики 29 находятся наполовину в отверстиях втулки, а наполовину в продольных пазах винта 26 Механизм возвратно-поступательного перемещения механических рук выполнен в виде кулачковою механизма, кулачок 30 которого расположен на приводном валу 15, а толкатель 31 выполнен с центральным отверстием для прохода через него дополнительною в.ма 16 и установлен на дополнительном вал 16 с возможностью колебательного движения Причем толкатель 31 посредством стоек 32, проходящих через отверстия в корпусе 1, связан со стержнем 33, который жестко связан посредством опорных элементов 34 с гайкой 27 шариковинтовой передачи
Каждый регулируемый упор 14 состоит из кронштейна 35 с выступами 36, в которые ввернуты регулировочные винты 37 Механические руки крепятся на механише поворота посредством держателей 28 и разрез- ной втулки 38
Гайку 27 от самопроизвольного перемещения вниз удерживает шариковая опора 39, упирающаяся в кронштейн 35 регулируемою nopa 14 и жестко закрепленная на опорном элементе 34 От перемещения вверх тайка 27 удерживается скобой 40
Устройство для перегрузки изделий расположено перед технологической позицией, выполненной в виде вибролотка 41 для подачи изделий 42 На выходе из устройства расположены вибрологок 43 для приема изделий На рабочих позициях смонтировано техно.Ю ическое оборудование или измерительные приборы (например, весы, датчики и т д )
Устройство работает следующим образом
В исходном положении механическая рука 3 зависла над изделием 42 вибролотка 41, механические руки 2 и 6 находятся над первой позицией, руки 4 и 7 - над второй позицией, а рука 5 - над вибролотком 43
5
5
Все шесть рук расположены в одной горизонтальной плоскости. С помощью захватного органа 9, представляющего собой вакуумную присоску, рука 3 забирает из вибролотка 41 изделие 42 и переносит его на первую позицию, на которой осуществляется первая технологическая операция, например контроль изделия по весу.
Одновременно с захватным органом 9 также срабатывает захватный орган 12 над пер0 вой позицией и захватный орган 13 над второй позицией В момент удержания изделия 42 захватными органами 9, 12 и 13 происходит сброс изделий 42 захватными органами 8, 10 и 11 соответственно на первую, вторую позицию и вибролоток 43. После того как произошел захват и удержание изделия 42 захватными органами 9, 12 и 13, а закватные органы 8, 10 и 11 сбросили изделия 42 на соответствующие позиции, происходит подъем всех шести ме0 чанических рук, а затем их поворот в плоскости расположения технологических позиций против часовой стрелки фиг 2) и останов рук 3, 6 и 7 над первой, второй позицией и вибролотком 43 соответственно с одной стороны и останов рук 2, 4 и 5 над изделием 42 вибролотка 41, первой и второй позицией соответственно После останова всех шести рук происходит их одновременное опускание и сбрасывание захватными органами 9, 12 и 13 изделия 42 на первую, вторую позицию и вибролоток 43 соответственно с одной стороны и захват изделий 42 захватными органами 8, 10 и II из вибролотка 41 с первой позицией и второй соответственно Затем происходит подъем всех шести рук, поворот их в плоскости
5 расположения технологических позиций по часовой стрелке и останов рук 3, 6 и 7 над изделием 42 вибролотка 41, первой позицией и второй соответственно с одной стороны и останов рук 2, 4 и 5 над первой, второй позицией и вибролотком 43 соответственно После останова всех шести рук происходит их одновременное опускание до исходного положения
Поворот механических рук в плоскости расположения технологических позиций производится от электродвигателя через редуктор. Вращение передается приводному валу
15,на который жестко насажен кулачок 17 Вращаясь, кулачок 17 через ролик 20 заставляет совершать колебательные движения
0 зубчатый сектор 18 относительно оси 19 Зубчатый сектор 18, находясь в зацеплении с ведомым зубчатым колесом 21, жестко закрепленным на дополнительном валу
16,сообщает ему колебательное движение. На дополнительном валу 16 закреплен зуб5 чатый сектор 22 зубчатого блока, который находится в зацеплении с коническим зубчатым колесом 23 Это коническое зубчатое колесо 23, насаженное жестко на ось
0
0
5
ведушет зубчатого колеса 24, заставляет последнее совершать колебательные движения относительно своей оеи. Ведущее зубчатое колес ) 24 находится в зацеплении с ведомыми зубчатыми колесами 25 и поэтому также совершает колебательные движения относительно своих осей.
Так как гайка 27 посажена на винт 26, жестко связанный с осью ведомых зубчатых колес 25, то она вместе с ними совершает колебательное движение через шарики 29, находящиеся наполовину в пазах гайки 27, а наполовину в пазах винта 26. В гайку 27 с ее торцевой части вставлен держатель 28 с закрепленной в нем механической рукой 3. Таким образом, держатель 28 через гайку 27 заставляет механическую руку 3 совершать колебательное движение - поворот в плоскости расположения: технологических позиций
Механизм возвратно-поступательного перемещения р;. к также приводится от электродвигателя через редуктор (не показаны), при этом вращение передается приводному валу 15, на который жестко посажен кулачок 30. Вращаясь, кулачок 30 вставляет толкатель 31 совершать в перпсндику лярном направлении возвратно-поступательное перемещение. Толкатель 31 че|нч сгойку 32 и стержень 33 передает возвратно-поступательное перемещение опорномv элементу 34 с закрепленной в нем гайкой 27.
Опускаясь или поднимаясь гайка 27 скользит по винту 26. В гайку 27 с ее торцевой части вставлен держатель 28 с закреп ленной в нем механической рукой 3. Таким образом, держатель 28 через гайку 27 заставляет механическую руку совершать возвратно-поступательное перемещение в перпендикулярном относительно плоскости ее поворота направлении.
Формула изобретения
. Устройство для перегрузки изделий, содержащее корпус, основную механическую руку с (ахватным ортаном, установленную
Ь
0
5
0
5
на корпусе, и размещенный в корпусе привод перемещения механической руки, включающий приводной вал и механизм поворота, отличающееся тем, что, с целью повышения производительности путем организации перегрузки изделий в два потока, оно снабжено дополнительными механическими руками с захватными органами, дополнительным валом, расположенным в корпусе параллельно приводному валу, и механизмом возвратно-поступатепьного перемещения механических рук, являющимся кулачковым механизмом, кулачок которого размещен на приводном валу, а толкатель установлен на дополнительном валу с возможностью качания и кинематически связан с механической рукой, при этом механизм поворота рук выполнен в виде кулачка, смонтированного на приводном валу, зубиато- п сектора, установленного на корпусе с возможностью качания и несуще о ролик, взаимодействующий с кулачком, а также зубчатого колеса, закрепленного на дополнительном валу, и идентичных зубчатых блоков, каждый из которых включает две зубчатые передачи, зубчатый сектор первой из которых смонтирован на дополнительном валу, а ее коническое зубчатое колесо сблокировано с ведущим зубчатым колесом второй передачи, причем каждое из двух ведомых пбчаты.х колес кинематически свн taiiD с соответствующей механической рукой 2 Устройство по п. 1, отличающееся тем. что кинематическая ведомого зубчато о колеса второй зубчатой передачи зубчатого блока с механической рукой выполнена в виде шариковинтовой передачи нин г которой жестко связан с ведомым ибчатым колесом, а гайка - с механической рукой.
3. Устройство по п. I, отличающееся тем. что, с целью повышения точности позиционирования, оно снабжено регулируемы- ми упорами, установленными на основании с возможностью шаимодейсгвия С механическими руками
Go I
a
a
00 Ю
уг
&SS&I
1 tx NOIVS -tMЈj Q
Риг.5

| название | год | авторы | номер документа |
|---|---|---|---|
| Клепальный станок | 1975 |
|
SU526432A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ НИТИ, КОТОРОЙ ПУГОВИЦА ПРИШИТА К ПРЕДМЕТУ ОДЕЖДЫ | 1998 |
|
RU2180372C2 |
| Моталка для полосы | 1989 |
|
SU1646640A1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| Зубодолбежный станок | 1985 |
|
SU1379031A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| МЕХАНИЗМ С КАЧАЮЩЕЙСЯ ШАЙБОЙ | 2001 |
|
RU2207463C2 |
| Сканирующее устройство | 1988 |
|
SU1702299A1 |
Изобретение относится к машиностроению, в частности к манипуляторам для перегрузки изделий с позиции на позицию, и может быть использовано в других отраслях народного хозяйства. Цель изобретения - повышение производительности за счет организации перегрузки изделий в два потока. Устройство для перегрузки изделий состоит из корпуса, основной и пяти дополнительных механических рук, привода их перемещений, включающего приводной вал, дополнительный вал, механизмы поворота и возвратно-поступательного перемещения, а также регулируемых упоров. Механизм возвратно-поступательного перемещения осуществляется подъем и опускание всех шести механических рук за счет кулачкового механизма, кулачок которого закреплен на приводном валу, а толкатель, установленный на дополнительном валу, связан посредством стоек и стержня с механическими руками. Механизм поворота осуществляет одновременный поворот шести рук за счет кулачка, закрепленного на приводном валу, ролика, кинематически связанного с дополнительным валом посредством зубчатого сектора и зубчатого колеса, и трех идентичных зубчатых блоков. Каждый из этих блоков выполнен в виде двух зубчатых передач. Зубчатый сектор первой из этих передач размещен на дополнительном валу, а коническое колесо сблокировано с ведущим зубчатым колесом второй передачи. Причем два ведомых зубчатых колеса второй передачи связаны с механической рукой посредством шариковинтовой передачей. 2 з.п.ф-лы, 5 ил.
| Патент США № кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Комнатная печь | 1925 |
|
SU977A1 |
