И
фае. 2
Изобретение относится к горной промьшшенности и предназначено для I перемещения горных машин по направляющей вдоль рамы .конвейера.
Целью изобретения является повыше
ние безопасности работы горной машины за счет повышения надежности сцепления захватов с направляющей.
На фиг. 1 изображен механизм подачи горной машины, общий вид; на фиг. 2 захват, разрез| на фиг. 3 - разрез А-А на фиг.2; на фиг. 4 - гидравлическая схема механизма подачи.
Механизм подачи горной машины включает корпус 1 с размещенными в нем захватами 2, которые связаны посредством шарниров 3 со штоками гид- родомкратов 4. Гидродомкраты 4 по- средством шарниров 5 соединены с корпусом 1.
Захваты 2 выполнены в виде башмаков 6, охватывающих направляющую 7. Каждьш захват 2 включает башмак 6 и боковую пластину 8, удерживающую захват 2 от схода с направляющей 7. Пластина 8 прикреплена к башмаку 6 посредством болтов 9.
В башмаке установлены два клина 10, причем угол между поверхностью клина и. направляющей 7 вьшолнен меньше угла трения клина о направляющую 7, .Клинья 10 шарнирно связаны со штоками гидродомкратов 11 захвата 2, расположенных параллельно клиновым поверхностям башмаков, жестко прикрепленных к башмаку 6 посредством болтов 12.
В гидродомкраты 11 захвата 2 встроены пружины 13, заклинивающие клинья 10 захвата 2. Поверхность клина 10 и контактирующая с ней клиновая поверхность башмака 6 составляет пару трения, угол трения которой больше угла клина 10, что обеспечивает меньшее расклинивающее усилие гидродомкрата 11 захвата 2. Внутри захвата вьтолнена опора 14, исключающая контакт клиньев 10 с направляющей 7.
Гидросхема механизма подачи гор- ной машины (фиг. 4) включает гидропривод 15, распределитель 16,сообщенный посредством трубопроводов 17 с гидрозамками 18. Последние сообще ны трубопроводами 19с гидродомкрата- ми 4. Распределитель 16 сообщен трубопроводами 20 с гидродомкратами 11 захватов 2.
5
30
.,, -
|с . Q
25
35
50 55
Устройство работает следующим образом.
Движение корпуса 1 горной машины обеспечивается согласованной работой двух захватов 2 путем попеременного перемещения на рабочий ход поршней гидродомкратов 4.
Для осуществления подачи в направлении по стрелке Б поршневая полость, например, левого гидродомкрата 4 и поршневая полость правого гидродомкрата 4, соединенных посредством шарниров 5 с корпусом 1 и шарниров 3 с захватами 2, подключаются к высоконапорному гидроприводу 15 через распределитель 16, трубопроводы 17, гидрозамки 18 и трубопроводы 19.
Под давлением пружины 13 раздвигаются гидродомкраты 11 левого захвата 2, которые закреплены при помощи болтов 12 и установлены параллельно клиновой поверхности башмаков 6, воздействуют на два клина 10,заставляя их скользить по клиновой поверхности башмака 6. При этом предварительно выбирается свободный ход захвата 2у а затем ввиду того, что угол клина 10 меньше угла трения клина 10, по направляющей 7 происходит зажатие захвата 2 на направляющей 7. Одновременно в гидродомкраты 11 правого захвата 2 поступает рабочая жидкость под давлением от гидропривода 15 через распределитель 16, трубопроводы 20 в гидродомкраты 11, которые втягивают клинья 10 и снимается сцепление захвата 2 с направляют щей 7. Захват 2 может свободно перемещаться посредством опоры 14 по направляющей 7 относительно корпуса 1. Причем за счет пластины 8, прикрепленной к башмаку 6 при помощи болтов 9, обеспечивается направленное перемещение башмака 6 по направ- ляющ ей 7 и предотвращается сход захвата 2 с направляющей 7. Для повышения надежности зацепления, а также предотвращения сползания горной машины за счет вытеснения рабочей жидкости при выключении гидропривода гидрозамки 18 замыкают полости гидродомкратов 11.
После завершения рабочего хода левого гидродомкрата 4 механизма подачи по указанному циклу совершает рабочий ход правый гидродомкрат 4, а левый совершает холостой ход. При этом поочередно при рабочем
ходе происходит заклинивание то правого, то левого захвата 2 с направляющей 7.
Изменение направления подачи на обратное осуществляется путем подачи рабочей жидкости в штоковую полость левого гидродомкрата 4 и поршневую полость правого домкрата. При этом заклинивание захватов 2 на направляющей 7 происходит так же как указано для движения по стрелке Б. Ввиду того, что гидродомкраты 11 захватов 2 расположены параллельно клиновой поверхности башмаков, 6 имеет опору 14, клинья 10 связаны с пружинами 13, а угол клина 10 выполнен не более угла трения клина 10 по направляющей 7, обеспечивается надежное гарантированное заклинивание захвата 2 на направляющей 7, а в случае порыва трубопроводов 20 удержание горной машины на конвейере даже в наклонных выработках.
14201564
Формула изо
бре тения
Механизм подачи горной маши ны, включающий корпус, шарнирно связанный посредством гидродомкратов,с захватами, охватьшающими направляющую, которые выполнены в виде башмаков с клиньями, связанных с гидродомкратами захватов, о т л и ч а ю - щ и и с я тем, что, с целью повышения безопасности работы горной маши- ны за счет повышения надежности сцепления захватов с направляющей, он
снабжен опорами, размещенными внутри каждого башмака, а гидродомкраты каждого захвата жестко прикреплены к башмаку и установлены параллельно поверхности клина, сопряженной с поверхностью башмака при этом угол между поверхностью клина, сопряженной с поверхностью направляющей, и поверхностью клина, сопряженной с поверхностью башмака, выполнен меньше
угла трения клина о направляющую,
6 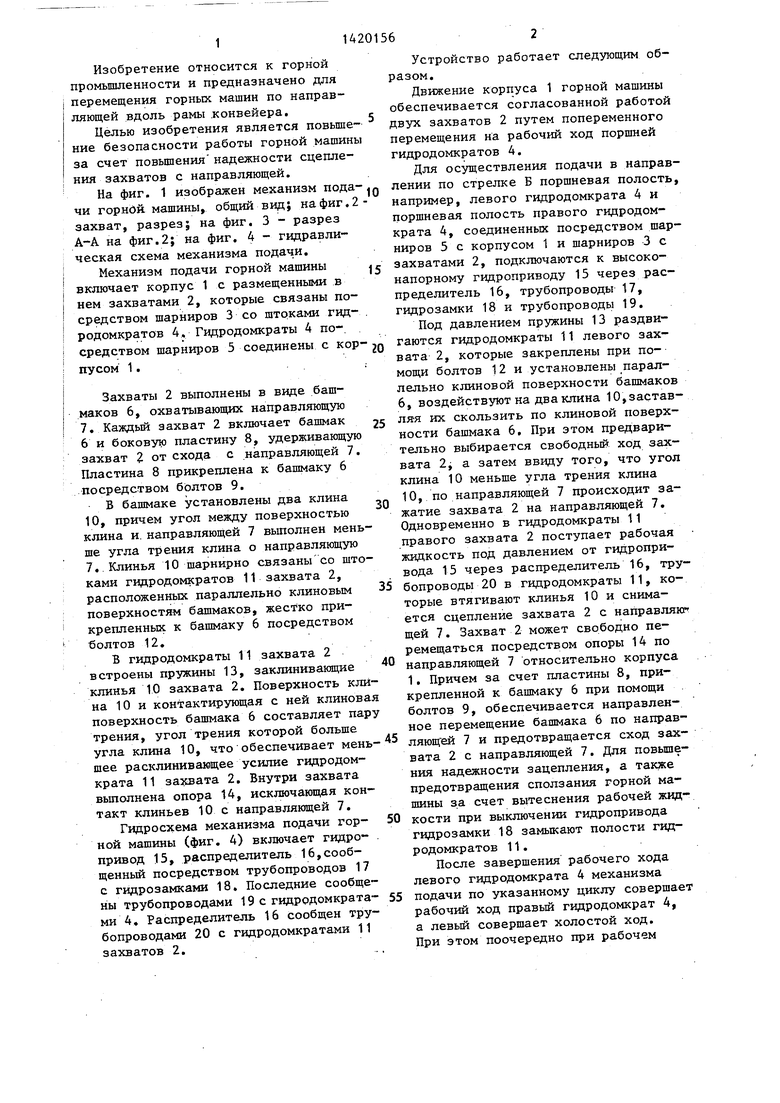

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи горной машины по направляющей | 1981 |
|
SU1073454A1 |
| Рельсовый тормоз | 1990 |
|
SU1763274A1 |
| Проходческий комбайн | 1986 |
|
SU1377381A1 |
| Гидропривод к прессу для испытания образцов на прочность | 1984 |
|
SU1155902A1 |
| Установка для испытания образцовпРи TPEXOCHOM СжАТии ТипА | 1979 |
|
SU815583A1 |
| МЕХАНИЗМ ПОДАЧИ ГОРНЫХ МАШИН | 1972 |
|
SU360464A1 |
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1652541A1 |
| Гидропривод к прессу для испытания образцов на прочность | 1985 |
|
SU1241090A1 |
| Гидравлический привод для ударногоСТРугА | 1979 |
|
SU815289A1 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2049937C1 |

Изобретение относится к горной промьшшенности и предназначено для перемещения горных машин по направляющей вдоль рамы конвейера. Цель изобретения - повьппение безопасности работы горной машины за счет повьш1е- ния надежности сцепления захватов с направляющей. Механизм подачи включает корпус, шарнирно связанный поН П ////////////////77//77 средством гидродомкратов (ГД) с захватами. Захваты выполнены в виде башмаков 6, охватывающих направляющую (Н) 7. Внутри захвата размещена опора 14. Шарнирно связывающие корпус с захватами гидродомкраты (ГД) жестко прикреплены к башмаку 6 и установлены параллельно поверхности клина 10, сопряженной с поверхностью башмака 6. Угол между поверхностью клина 10, сопряженной с поверхностью Н 7, и поверхностью клина 10, сопряженной с поверхностью башмака 6, выполнен меньше угла трения клина. 10 о Н 7. При- осуществлении подачи раздвигающихся ГД 11, которые воздействуют на. а клинья 10, заставляя их скользить по клиновой поверхности башмака 6. Происходит зажатие захвата на Н 7. Одновременно снимается сцепление с другого захвата. За счет пластины, прикреп-,., ленной к башмаку., обеспечивается его 5 направленное перемещение по Н 7. 4 ил. k СЛ /2 // /2 4 ts9
1
J
3 г «1
| Механизм перемещения горного комбайна (его варианты) | 1980 |
|
SU929836A1 |
| Е | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Механизм подачи горной машины по направляющей | 1981 |
|
SU1073454A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
