L
(Л
со
о: 4;.
2, Устройство по п. 1, о т л ичающееся тем,что ручка управления снабжена конусом, а в обойме
установлен сопряженный с ним рычаг, кулачок которого связан с корпусом.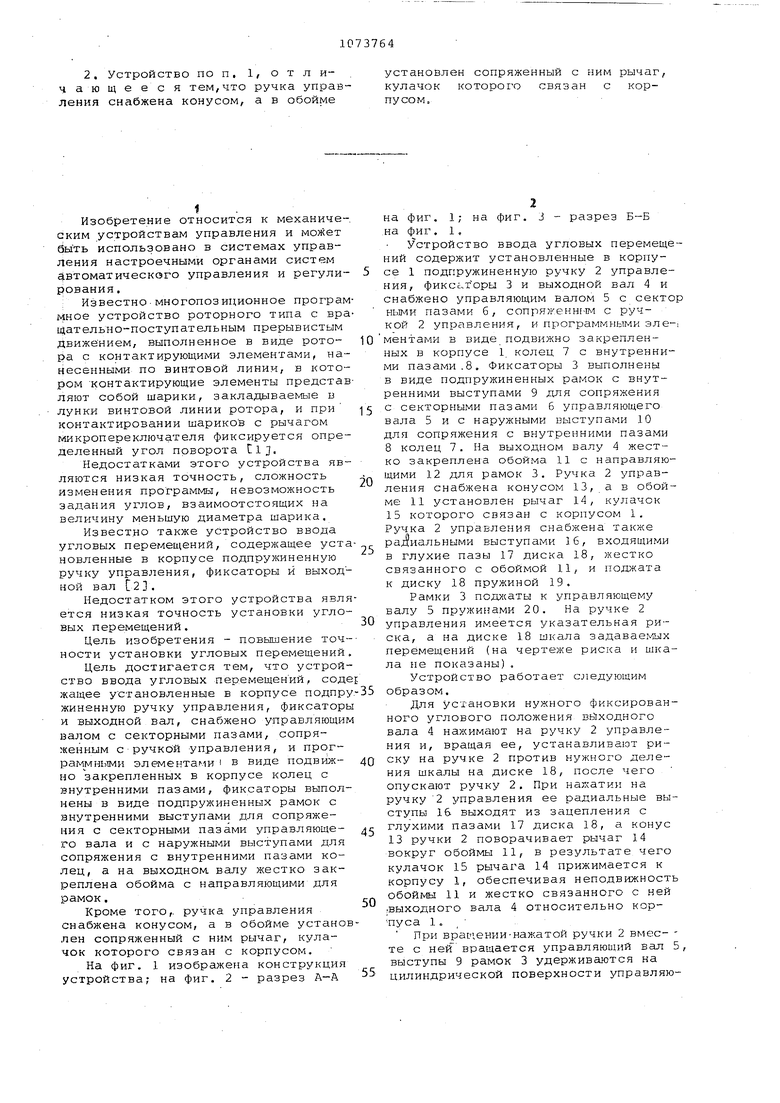
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода угловых перемещений | 1987 |
|
SU1418683A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2011 |
|
RU2488672C2 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Контактное устройство | 1989 |
|
SU1762427A1 |
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА ИНВАЛИДНОГО КРЕСЛА-КОЛЯСКИ | 1995 |
|
RU2116774C1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| ПНЕВМОТУРБОДВИГАТЕЛЬ ДЛЯ ПРИВОДА РУЧНОГО ИНСТРУМЕНТА | 1996 |
|
RU2080454C1 |
| ЗАПОРНО-ПРИЖИМНОЕ УСТРОЙСТВО ДЛЯ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2265112C2 |
1. УСТРОЙСТВО ВВОДА УГЛОВЫХ ПЕРЕМЕЩЕНИЙ, содержащее установленные в корпусе подпружиненную ручку управл-Ния, фиксаторы и выходной вал. отличающееся тем,что, с целью повышения точности установки угловых перемещений, онр снабжено управляющим валом с секторными пазами, сопряженным с ручкой управления, и программными элементами в виде подвижСССР но закрепленных в корпусе колец с внутренними пазами, фиксаторы вьтолнены в виде подпружиненных рамок с внутренними выступами для сопряжения с секторными пазами управляющего вала и с наруж- HfcMM выступами для сопряжения с внутренними пазами колеи, а на выходном валу жестко закреплена обойма с направляющими для рамок.
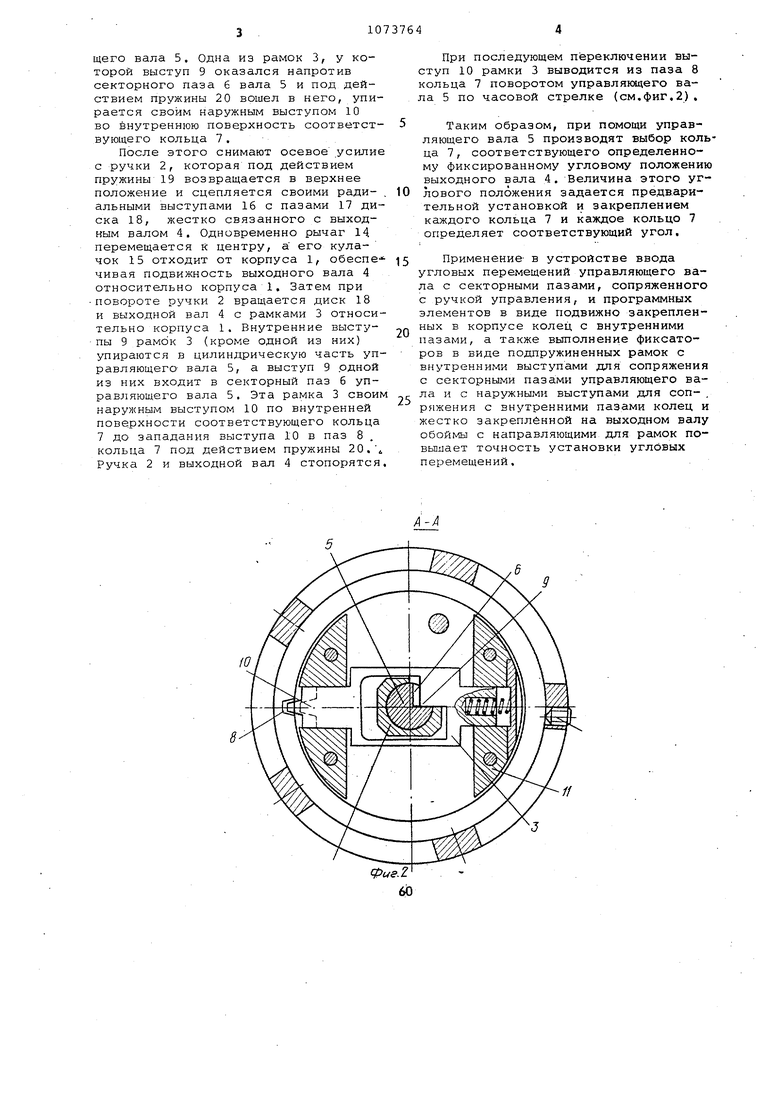
Изобретение относится к механиче ским устройствам управления и может быть использовано в системах управления настроечными органами систем автоматического управления и регули рования , : Известномногопозидионное програм мное устройство роторного типа с вр щательно-поступательным прерывистым движением, выполненное в виде ротора с контактирующими элементами, на несенными по винтовой линии, в кото ром контактирующие элементы предста ляют собой шарики, закладываемые в лунки винтовой линии ротора, и при контактировании шариков о рычагом микропереключателя Фиксируется опре деленный угол поворота tlj. Недостатками этого устройства яв ляются низкая точность, сложность изменения программы, невозможность задания углов, взаимоотстоящих на величину меньшую диаметра шарика. Известно также устройство ввода угловых перемещений, содержащее уст новленные в корпусе подпружиненную ручку управления, фиксаторы и выход ной вал С 2 3, Недостатком этого устройства явл ется низкая точность установки угло вых перемещений. Цель изобретения - повышение точ ности установки угловых перемещений Цель достигается тем, что устрой ство ввода угловых перемещений, соде жащее установленные в корпусе подпру жиненную ручку управления, фиксаторы и выходной вал, снабжено управляющим валом с секторными пазами, сопряженным с ручкой управления, и программными элементами i в виде подвижно закрепленных в корпусе колец с внутренними пазами, фиксаторы выполнены в виде подпружиненных рамок с внутренними выступами для сопряжения с секторными пазами управляющего вала и с наружными выступами для сопряжения с внутренними пазами колец, а на выходной валу жестко закреплена обойма с направляющими для рамок. Кроме того,, ручка управления снабжена конусом, а в обойме установ лен сопряженный с ним рычаг, кулачок которого связан с корпусом. На фиг. 1 изображена конструкция устройства; на фиг. 2 - разрез А-А на фиг, 1; на фиг. J - разрез Б-Б на фиг. 1, Устройство ввода угловых перемещений содержит установленные в корпусе 1 подпружиненную ручку 2 управления, фикс.торы 3 и выходной вал 4 и снабжено управляющим валом 5 с сектор ными пазами 6, сопряженнмм с ручкой 2 управления, и программными эле-; ментами в виде подвижно закрепленных в корпусе 1 колец 7 с внутренними пазами.8. Фиксаторы 3 выполнень в виде подпружиненных рамок с внутренними выступами 9 для сопряжения с секторными пазами 6 управляющего вала 5 и с наружными выступами 10 для сопряжения с внутренними пазами 8 колец 7. На выходном валу 4 жестко закреплена обойма 11 с направляющими 12 для рамок 3. Ручка 2 управления снабжена конусом 13, а в обойме 11 установлен рычаг 14, кулачок 15 которого связан с корпусом 1, Ручка 2 упратзления снабжена также радиальными выступами 16, входящими в глухие пазы 17 диска 18, жестко связанного с обоймой 11, и поджата к диску 18 пружиной 19. Рамки 3 поджаты к управляющему валу 5 пружинами 20. На ручке 2 управления имеется указательная риска, а на диске 18 шкала задаваег -ых перемещений (на чертеже риска и шкала не показаны). Устройство работает следующим образом. Для установки нужного фиксированного углового положения вь гходного вала 4 нажимают на ручку 2 управления и, вращая ее, устанавливают риску на ручке 2 против нужного деления шкалы на диске 18, после чего опускают ручку 2. При нажатии на ручку 2 управления ее радиальные выступы 16 выходят из зацепления с глухими пазами 17 диска 18, а. конус 13 ручки 2 поворачивает рычаг 14 вокруг обоймы 11, в результате чего кулачок 15 рычага 14 прижимается к корпусу 1, обеспечивая неподвижность обоймы 11 и жестко связанного с ней выходного вала 4 относительно корпуса 1. , При вращении-нажатой ручки 2 вмес- те с Heif вращается управляющий вал 5, выступы 9 рамок 3 удерживаются на цилиндрической поверхности управляющего вала 5. Одна из рамок 3, у которой выступ 9 оказался напротив секторного паза 6 вала 5 и под действием пружины 20 вошел в него, упирается своим наружным выступом 10 во внутреннюю поверхность соответствующего кольца 7,
После этого снимают осевое усилие с ручки 2, которая под действием пружины 19 возвращается в верхнее положение и сцепляется своими радиальными выступами 16 с пазами 17 диска 18, жестко связанного с выходным валом 4. Одновременно рычаг 14 перемещается к центру, а его кулачок 15 отходит от корпуса 1, обеспе чивая подвижность выходного вала 4 относительно корпуса 1. Затем при повороте ручки 2 вращается диск 18 и выходной вал 4 с рамками 3 относительно корпуса 1. Внутренние выступы 9 рамок 3 (кроме одной из них) упираются в цилиндрическую часть управляющего вала 5, а выступ 9 одной из них входит в секторный паз 6 управляющего вала 5. Эта рамка 3 своим наружным выступом 10 по внутренней поверхности соответствующего кольца 7 до западения выступа 10 в паз 8 . кольца 7 под действием пружины 20, Ручка 2 и выходной вал 4 стопорятся.
При последующем переключении выступ 10 рамки 3 выводится из паза 8 кольца 7 поворотом управлякхцего вала 5 по часовой стрелке (см,фиг,2),
Таким образом, при помощи управляющего вала 5 производят выбор кольца 7, соответствующего определенному фиксированному угловому положению выходного вала 4. Величина этого уг0 лового положения задается предварительной установкой и закреплением каждого кольца 7 и каждое кольцо 7 определяет соответствующий угол,
5 Применение- в устройстве ввода
угловых перемещений управляющего вала с секторными пазами, сопряженного с ручкой управления, и программных элементов в виде подвижно закрепленных в корпусе колец с внутренними
0 пазами, а также выполнение фиксаторов в виде подпружиненных рамок с внутренними выступами для сопряжения с секторными пазами управляющего вала и с наружными выступами для соп5ряжения с внутренними пазами колец и жестко закреплённой на выходном валу обоймы с направляющими для рамок повшиает точность установки угловых перемещений.
75
6-Б
15
1Ц
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МНОГОПОЗИЦИОННОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 0 |
|
SU174062A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 756394, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
