2. Устройство по п. 1, отличающееся тем, что, с целью исключения погрешности от изменения радиуса намотки, оно снабжено подвижным столом, установленным с возможностью перемещения в горизонтальной плоскости, на котором размещен регулятор натяжения так, что удовлетворяется условиегл
В
где В - расстояние от оси приемной оправки до оси двуплечего рычага, мм; А -расстояние от оси приемной оправки до оси пассивного лентопроводника, мм; )-радиус пассивного лентопроводника, мм;
R -текущее значение радиуса намотки, мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения натяжения движущихся ленточных материалов | 1983 |
|
SU1144005A1 |
| Устройство для калибровки измерителя натяжения ленты | 1986 |
|
SU1435973A1 |
| Устройство для регулирования поло-жЕНия КРОМКи лЕНТОчНОгО МАТЕРиАлА пРипЕРЕМОТКЕ | 1979 |
|
SU817112A1 |
| Устройство для регулирования натяжения ленточного материала | 1983 |
|
SU1148829A1 |
| РАСКЛАДЧИК НАМОТКИ | 1991 |
|
RU2028268C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАМОТКИ МЕТАЛЛИЧЕСКИХ ЛЕНТ НА НАВИВОЧНУЮ ОПРАВКУ | 2007 |
|
RU2391169C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Устройство для регулировки процентного содержания связующего вещества в движущейся ленте из жгутов армирующих волокон | 2016 |
|
RU2646010C1 |
| Станок для навивки ленточныхМАгНиТОпРОВОдОВ | 1978 |
|
SU853681A1 |
| Устройство для намотки полосового материала | 1990 |
|
SU1710161A1 |
Г. УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ДВИЖУЩИХСЯ ЛЕНТОЧНЫХ МАТЕРИАЛОВ, содержащее невращающийся пассивный лентопровод27 ,- 20 Звых V SAd (Л ел о со CAD ник, приемную оправку, два невращающихся лентопроводника и регулятор натяжения, отличающееся тем, что, с целью расширения функциональных возможностей, в него введены три датчика крутящего момента, датчик угла поворота, датчик радиуса намотки и двуплечий рычаг с осью, на котором на равном расстоянии от оси размещены невращающиеся лентопроводники, первый и второй датчики крутящего момента соединены с первым и вторьш невращающимися лентопроводниками соответственно, третий датчик крутящего момента и датчик угла поворота соединены с осью рычага, а датчик радиуса намотки соединен с приемной оправкой.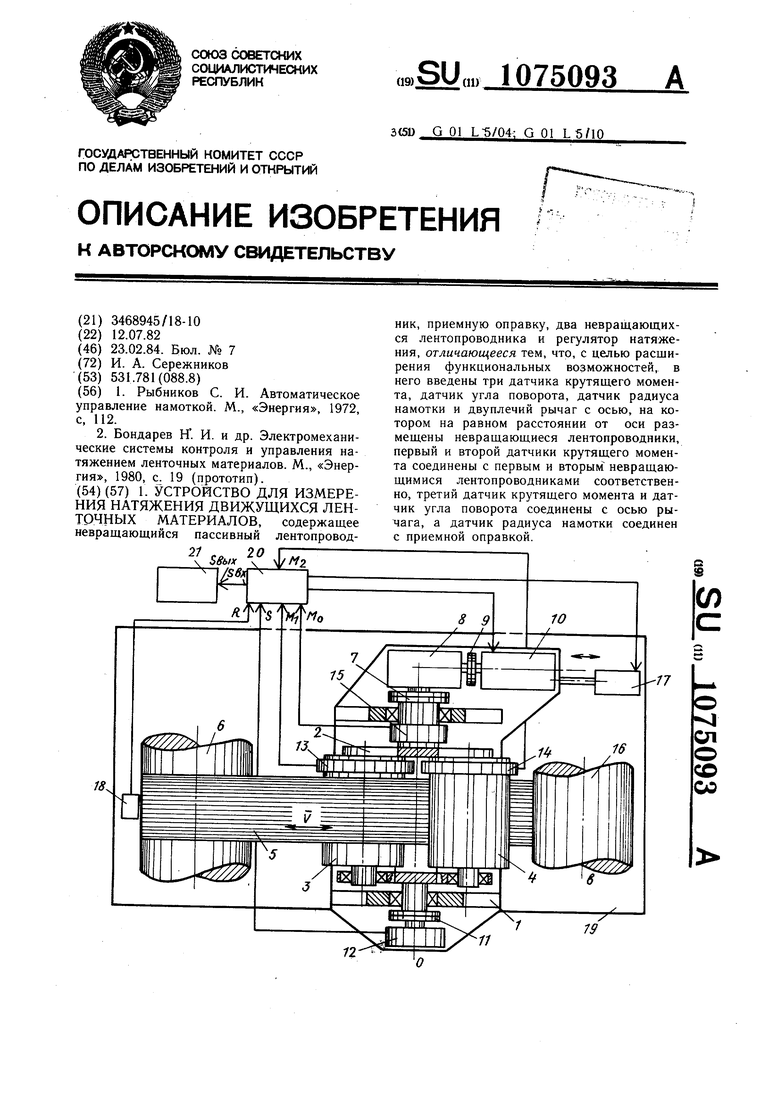
1
Изобретение относится к силоизмерительной технике, к методам измерения натяжения движущихся ленточных материалов.
Известно устройство для определения натяжения по моментам взаимодействия оправки с наматываемым материалом, встроенное в вал между оправкой и приводом и измеряющее момент взаимодействия оправки и привода 1.
Недостатком известного устройства являются погрешности измерения, возникающие вследствие изменения радиуса и угла намотки, обусловленные тем,, что не учитывается изменение радиуса намотки и не вводится компенсация на изменение угла намотки.
Наиболее близким по технической сущности к изобретению является измеритель натяжения движущихся ленточных материалов, содержащий два невращающихся направляющих лентопроводника и один измерительный невращающийся лентопроводник, которые взаимодействуют с движущейся лентой 2.
Недостатком этого измерителя является низкая точность, обусловленная погрешностями от изменения угла обхвата измерительного лентопроводника. от величины натяжения движущегося ленточного материала и от изменения коэффициента трения движущегося ленточного материала о лентопроводники.
Целью изобретения является расширение функциональных возможностей и повышение точности измерения натяжения.
Поставленная цель достигается тем, что в устройство для измерения натяжения движущихся ленточных материалов, содержащее невращающийся пассивный лентопроводник, приемную оправку, два невращающихся лентопроводника и регулятор натяжения, введены три датчика крутящего момента, датчик угла поворота, датчик радиуса намотки и двуплечий рычаг с осью, на
котором на равном расстоянии от оси размещены невращающиеся лентопроводники, первый и второй датчики крутящего момента соединены с первым и вторым невращаюшимися лентопроводниками соответственно, третий датчик крутящего момента и датчик угла поворота соединены с осью рычага, а датчик радиуса намотки соединен с приемной оправкой.
Кроме того, устройство снабжено подвижным столом, установленным с возможностью перемещения в горизонтальной плоскости, на котором размещен регулятор натяжения так, что удовлетворяется условие В AR
5я-Я
где В - расстояние от оси приемной оправки до оси двуплечего рычага, мм; А -расстояние от оси приемной оправки до оси пассивного лентопроводника, мм;
0 Р -радиус пассивного лентопроводника,
мм; R -текущее значение радиуса намотки,
мм.
На чертеже показано предлагаемое уст5 ройство.
Устройство содержит подвижный стол 1, в опорах качения которого установлен двуплечий рычаг-2 с закрепленными на одинаковом расстоянии от оси вращения рычага цилиндрическими невращающимися ленто проводниками 3 и 4, взаимодействующими с движущимся ленточным материалом 5. наматываемым на приемную оправку 6. Верхняя по рисунку полуось двуплечего рычага 2 через муфту 7 может получать угловое перемещение от тихоходного вала червячного редуктора 8, быстроходный вал которого через муфту 9 соединен с валом исполнительного электродвигателя 10 постоянного тока. Червячный редуктор 8 и исполнительный двигатель 10 установлены 0 на подвижном столе 1. Противоположная полуось двуплечего рычага 2 через муфту И соединена с датчиком 12 угла поворота.
На лентопроводнике 3 размещен датчик 13 крутящего момента, а на лентопроводнике 4 - датчик 14 крутящего момента. На полуоси двуплечего рычага 2, соединенной с муфтой 7, размещен датчик 15 крутящего момента. Движущийся ленточный материал 5 на вход устройства поступает с невращающегося пассивного лентопро водник а 16. Датчик 12 угла поворота установлен на подвижном столе 1, который получает линейное перемещение от привода корректирующего механизма 17. Опоры вращения оправки 6, пассивный лентопроводник 16, привод корректирующего механизма 17 и датчик 18 радиуса намотки установлены на основании 19, по направляющим которого может перемещаться подвижный стол 1.
Электрические сигналы о величинах моментов М, Mg, MO угла поворота Y и радиуса намотки R поступают с датчиков 13, 14, 15, 12 и 18 на микро-ЭВМ устройства 20, которая вычисляет величины входного и выходного натяжений движущегося ленточного материала, коэффициентов трения и выдает значения этих величин на цифровой индикатор 21, а также управляет исполнительным двигателем 10 и проводом корректирующего механизма 17. В память микро-ЭВМ 20 в начале намотки изделия оператором вводится значение заданного технологического уровня натяжения.
Устройство работает следующим образом.
Перед началом намотки корректирующий механизм 17 устанавливает подвижный стол 1 в положение, удовлетворяющее условию В, 4fU
где В - начальное расстояние от оси оправки 6 до оси вращения двуплечего рычага 2; Л -расстояние от оси оправки б до оси
пассивного лентопроводника; Ro-радиус оправки; Я -радиус пассивного лентопроводника. При намотке изделия лентопроводник 3 от сил натяжения получает вращающий момент MI, лентопроводник 4 от сил натяжения - в.ращающий момент М, осевой вал двуплечего рычага 2 - вращающий момент Мд. Вращающие моменты М, М, Мд угол Рмежду прямой, соединяющей ось оправки с осью пассивного лентопроводника, и прямой, проходящей через ось вращения двуплечего рычага 2 и оси лентопроводников 3 и 4, и радиус намотки R измеряются одновременно датчиками 13, 14, 15, 12 и 18 и поступают на микро-ЭВМ 20, которая вычисляет величины входного Sex и выходного SBHX натяжений и коэффициентов трения и управляет исполнительным двигателем 10, который через редуктор 8 устанавливает двуплечий рычаг 2 в необходимое положение.
Изобретение позволяет измерять основные механические параметры, описывающие движение ленточных материалов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рыбников С | |||
| И | |||
| Автоматическое управление намоткой | |||
| М., «Энергия, 1972, с, 112 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бондарев Н | |||
| И | |||
| и др | |||
| Электромеханические системы контроля и управления натяжением ленточных материалов | |||
| М., «Энергия, 1980, с 19 (прототип). | |||
