(54) СТАНОК ДЛЯ НАВИВКИ ЛЕНТОЧНЫХ МАГНИТОПРОВОДОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для навивки ленточных магнитопроводов | 1981 |
|
SU987696A1 |
| Устройство для изготовления витыхлЕНТОчНыХ МАгНиТОпРОВОдОВ | 1979 |
|
SU847383A1 |
| Навивочная головка для изготовления гибких проволочных валов | 1973 |
|
SU441077A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИТЫХ ЛЕНТОЧНЫХ МАГНИТОПРОВОДОВ | 2007 |
|
RU2348999C1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВА СЕРДЕЧНИКОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2013 |
|
RU2627228C9 |
| Механизм зажима ленты | 1988 |
|
SU1647673A1 |
| Устройство для навивки ленточных магнитопроводов | 1971 |
|
SU505036A1 |
| Навивочное устройство автомата для изготовления спиральных пружин | 1977 |
|
SU657894A1 |
| Устройство для изготовления витых ленточных магнитопроводов | 1985 |
|
SU1317499A1 |
1
Изобретение относится к технологическому оборудованию для изготовления витых ленточных магнитопроводов преимущественно тороидального типа, используемых в радиоэлектронной промышленности.
Известно устройство для навивки ленточных магнитопроводов 1. Однако это устройство сложно и непригодно для намотки сердечников из ленты, толщина которой составляет единицы десятки микрон.
Известна установка -для навивки ленточных магнитопроводов 2, которая пригодна лищь для намотки сердечников диаметром 1-5мм и небольшого натяжения 5- 50 г. Кроме того, она имеет значительный вес.
Известна также установка для навивки ленточных магнитопроводов, содержащая привод с редуктором и двигателем, навивочную оправку, блок управления двигателем, устройство для натяжения ленты с узлом торможения и задатчиком натяжения 3J,
Ее недостатки заключаются в том, что она в процессе навивки может деформировать кромку ленты о щеку навивочной оправки при уходе ленты в направлении, перпендикулярном плоскости навивки, имеет небольщой диапазон регулированиями низкую стабильность заданных скоростей и натяжения ленты. Таким образом, недостатками известной установки 3 являются низкие качество сердечников и производительность установки.
Целью изобретения является повышение качества изготавливаемых сердечников и производительности.
Это достигается тем, что станок содержит систему регулирования с главной обратной связью по линейной скорости ленты,
10 систему регулирования с реверсионной электромагнитной муфтой и главной обратной связью по положению навиваемой ленты относительно навивочной оправки, навивочная оправка снабжена приводом ее возвратнопоступательного перемещения в направлении
15 перпендикулярном плоскости навивки ленты, а муфта связана с навивочной оправкой, и редуктором, устройство для натяжения ленты выполнено в виде двуплечего рычага, на одном плече которого установлен демпфер и направляющий ролик, а на дру30гом - задатчик натяжения, и системы регулирования с главной обратной связью по натяжению и с датчиком углового положения рычага, расположенного на оси вращения рычага.
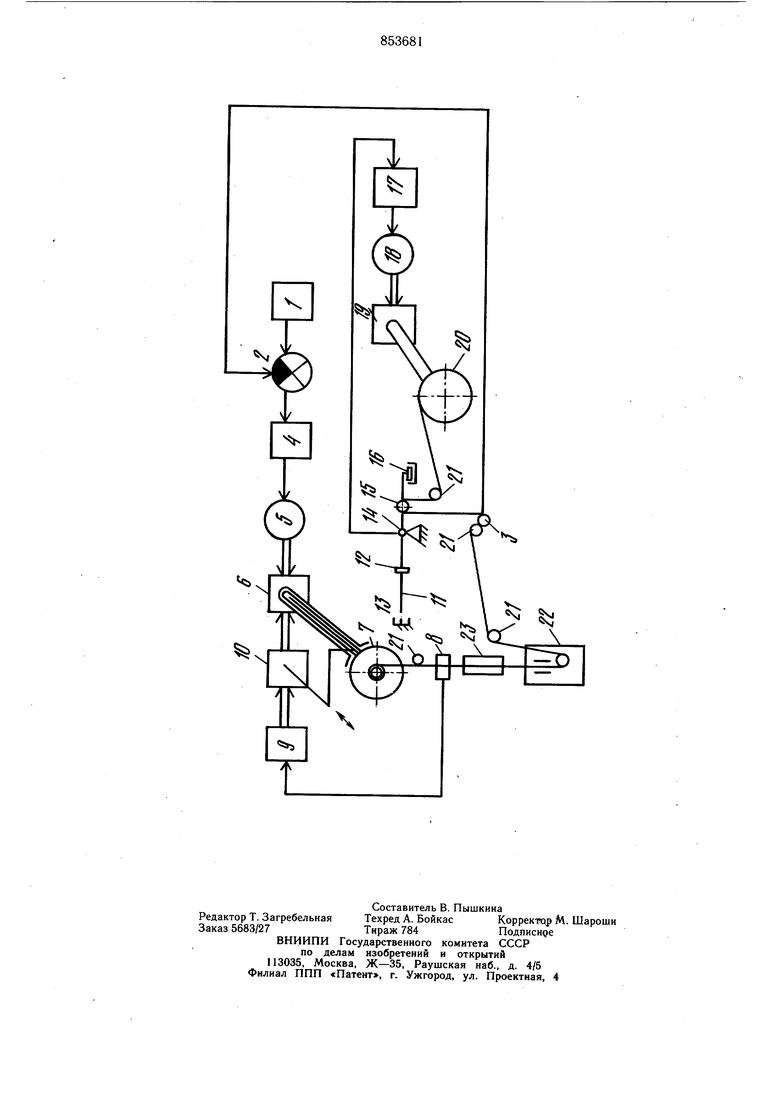
На чертеже приведена функциональная схема станка.
Система регулирования скорости включает в себя задатчик 1 скорости навивки, сумматор 2, который алгебраически суммирует сигналы задатчика и датчика 3 линейной скорости, блок 4 управления, электродвигатель 5, редуктор 6, навивочную оправку 7, причем оправка 7 выполнена подвижной вдоль оси ее вращения, а редуктор 6 имеет еще один выход для подключения реверсионной муфты системы положения ленты. Система положения состоит из датчика 8 положения ленты, блока 9 управления, реверсионной муфты 10. Система регулирования натяжения состоит из устройства натяжения, выполненного в виде двуплечего рычага 11 с подвижным грузом 12 и индикатором 13 нулевого положения, на оси вращения которого установлен датчик 14 угла. С рычагом 11 соединены подвижный ролик 15 и демпфер 16, блок 17 управления, электродвигатель 18, редуктор 19 с подающей оправкой 20. Устройство содержит также направляющие ролики 21, ванну 22 электрофореза и сущильную печь 23.
Устройство работает следующим образом. Подвижным грузом 12 задается требуемая величина натяжения ленты. Лента с подающей оправки проходит через направляющие ролики 21, подвижный ролик 15, датчик 3 линейной скорости, ванну 22 электрофореза, сущильную печь 23 и закрепляется на навивочной оправке. Под действием груза 12 датчик 14 угла повернется и напряжение с датчика угла поступит на вход блока 17. Система натяжения обеспечит заданное натяжение ленты, при этом лента через подвижный ролик 15 установит датчик угла в положение, при котором на входе блока 17 управления будет минимальный сигнал обеспечивающий натяжение ленты. Затем включается система скорости. Величина линейной скорости ленты и закон ее изменения от нулевой скорости до требуемой осуществляется задатчиком 1 скорости. При движении ленты сигнал с датчика 3 линейной скорости поступает на сумматор 2.
Разница сигналов с задатчика скорости и. датчика линейной скорости поступает в блок 4 управления, а с его выхода - на электродвигатель 5, который приводит во вращение навивочную оправку 7 через редуктор 6. Если по даким-либо причинам лента «ущла с требуемого положения, датчик 8 положения выдает сигнал в блок 9 управления системы положения, который подключит реверсивную муфту 10 к редуктору 6. При этом навивочная оправка 7 получит поступательное движение вдоль своей оси вращения, восстанавливая требуемое положение ленты.
Стабилизация систем осуществляется демпфером 16 и местными обратными связями систем регулирования.
Предложенный станок позволяет поддерживать стабильную линейную скорость навивки, стабильное требуемое натяжение и устраняет деформацию кромки ленты о щеку навивочной оправки, что увеличивает производительность и повыщает качество сердечНИКОВ.
Формула изобретения
Станок для навивки ленточных магнитопроводов, содержащий привод с редуктором и двигателем, навивочную оправку, блок управления двигателем, устройство для натяжения ленты с узлом торможения и задатчиком натяжения, отличающийся тем, что, с целью повыщения качества изготавливаем мых сердечников и производительности, он содержит систему регулирования с главной обратной связью по линейной скорости ленты, систему регулирования с реверсионной электромагнитной муфтой и главной обратной связью по положению навиваемой ленты относительно навивочной оправки, навивочная оправка снабжена приводом ее розвратно-поступательного перемещения в направлении, перпендикулярном плоскости навивки ленты, а муфта связана с навивочной 5 оправкой и редуктором, устройство для натяжения ленты выполнено в виде двуплечего рычага, на одном плече которого установлен демпфер и направляющий ролик, а на другом - задатчик натяжения, и системы регулирования с главной обратной связью по 0 натяжению и с датчиком углового положения рычага, расположенного на оси вращения рычага.
Источники информации, принятые во внимание при экспертизе
