ti
ел
Us
о: сю Изобретение относится к измерительной техникеи автоматике. Известны маятниковые компенсацио ные акселерометры, которые содержат чуаствительный элемент, выполненный в Виде маятника, соединенного с вхо дом датчика угла, выход которого че рез усилитель обратной связи соединен с входом датчика момента ГЛ и 2. Однако эти датчики имеют ограниченный угол поворота подвижной систе мы, что оказывает существенное влия ние на диапазон измерительного преобразования. Увеличение же угла пово рота подви хной системы приводит к резкому возрастанию методических ошибок за счет отклонения оси чувствительности акселерометра от своего первоначального положения и влияния поперечного ускорения.. В связи с усложнением решаемых задач возникает необходимость расширения пределов измерительного преобразования. Целью изобретения является расширение диапазона измерения. Цель достигается тем, что в маятниковый компенсационный акселерометр содержащий чувствительный элемент, выполненный в виде маятника, соединенного с входом датчика угла, выход которого через усилитель обратной связи соединен с входом датчика момента, введены фиксатор, выполненный в В1-ще электромагнитного реле,, и генератор импульсов, при этом вход фиксатора соединен с выходом датчика угла, а выход - с генератором, подключенным к одному из входов усилителя обратной связи. На чертеже представлена структур;ная схема маятникового компенсационного акселерометра. Акселерометр содержит фиксатор 1, датчик 2 угла, генератор 3 импульсов, усилитель 4 обратной связи датчик 5 момента. Акселерометр работает следующим образом. Фиксатором 1; в качестве которого используется электромагнитное реле, напряжение срабатывания которого соответствует предельному значению измерительного преобразования, определяется момент превышения выходного сигнала датчика 2 угла над сигналом, соответствующим предельному значению измерительного преобразования Ид (,р. . Управляющий сигнал Dij фиксатора 1 включает в работу генератор 3, который на основе выходного сигнала датчика угла Ид формирует дополнительный линейно изменяющийся во времени сигнал 11 . Полярность сигналов Уд иидоп совпадает. На выходе усилителя 4 обратной связи суммированием на его входе дополнительного линейно изменяющегося во времени сигнала С1до(, и выходного сигнала датчика угла Уд формируется выходной сигнал акселерометра И который через датчик 5 момента создает уравновешивающий момент. Увеличение по абсолютной величине дополнительного сигнала и доп происходит до момента равенства выходного сигнала датчика угла Уд сигналу, соответствующему предельному значению преобразования и j,p . При этом уравновешивающий момент равен моменту, создаваемому входным воздействием у g, , В дальнейшем при любом изменении входного воздействия cjg Wg, р поддерживается равенство выходного сигнала датчика yr/fa Ид сигналу, соответствующему предельному значению преобразования изменением дополнительного линейно изменяющегося во времени сигнала Удоп . Если выходной сигнал датчика угла Uf 11 д.„р , то фиксатор 1 включает генератор 2. При этом выходной сигнал акселерометра определяется только сигналом с выхода датчика угла Ид. . Таким образом, предложенный маятниковый компенсационный акселерометр позволяет расширить диапазон измерений .
| название | год | авторы | номер документа |
|---|---|---|---|
| Маятниковый компенсационный акселерометр | 1985 |
|
SU1278731A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121693C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЛИНЕЙНОСТИ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА КОМПЕНСАЦИОННОГО ТИПА | 2016 |
|
RU2626071C1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1969 |
|
SU1839872A1 |
МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР, содержащий чувствительный элемент, выполненный в виде маятника, соединенного с входом датчика угла, выход которого через усилитель обратной связи соединен с входом датчика момента,.отличаювдийс я тем, что, с целью расширения диапазона измерений, в него введены фиксатор, выполненный в виде электромагнитного реле, и генератор импульсов, при этом вход фиксатора соединен с выходом датчика угла, а выход с генератором, подключенным к одному из входов усилителя обратной связи.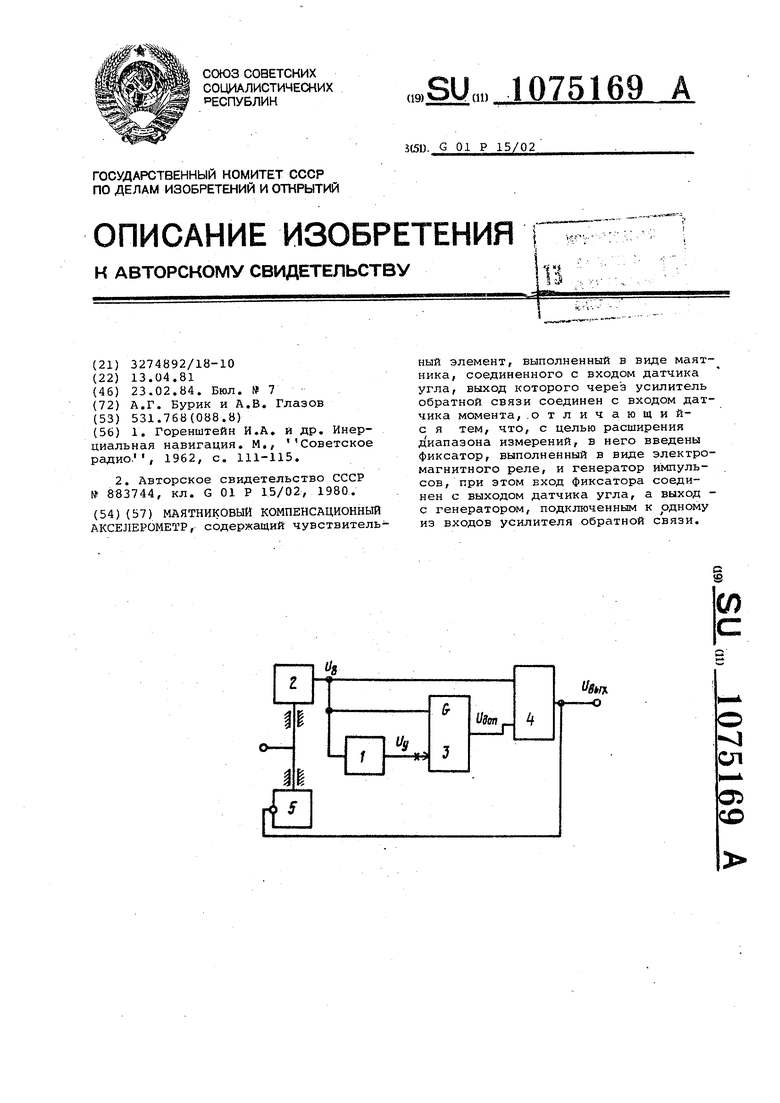
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Горенштейн И.А, и др | |||
| Инерциальная навигация | |||
| М,, Советское радио., 1962, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Интегрирующий акселерометр | 1980 |
|
SU883744A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
