Способ относится к измерительной технике и может быть использован в области проектирования приборов для измерения линейного ускорения.
Линейность масштабного коэффициента акселерометра линейных ускорений является важнейшей технической характеристикой, определяющей класс измерителя линейных ускорений. Для маятниковых акселерометров линейных ускорений компенсационного типа как кварцевых, так и кремниевых величина нелинейности масштабного коэффициента, вызванная датчиком компенсационного момента, обычно является наибольшей по отношению к значениям нели-нейностей, возникающих от других погрешностей. Поясним причину этого явления.
В маятниковых акселерометрах Q-flex и Si-flex для создания компенсационного момента обычно используются плунжерные датчики, в которых при протекании тока по катушке возникают две силы.
Первая сила Fмэ - магнитоэлектрическая, пропорциональна току, создает компенсационную силу Ампера:

где В - магнитная индукция в зазоре, I - ток, n, Lcp - число витков в катушке датчика и средняя длина витка, α - угол ориентации направления тока относительно направления вектора В.
Вторая сила - электромагнитная Fэм, возникает вследствие притяжения катушкой с током магнитопровода плунжерного датчика.
Электромагнитная сила:

пропорциональна квадрату тока и создает упомянутую выше нелинейность масштабного коэффициента.
Аналогом способа снижения нелинейности масштабного коэффициента, вызванной электромагнитным моментом, является способ, описанный в книге Коновалова С.Ф. [1, стр. 54]. Способ использует устройство, состоящее во введении в конструкцию дополнительной обмотки с числом витков ω1 [1, стр. 52, 54, рис. 2.4], по которой течет ток I1, пропорциональный основному току I.
Обмотка ω1 с протекающим по ней током I1 создает магнитный поток, который, взаимодействуя с током I, создает момент компенсации:

где (см. формулу (2.53) в [1, стр. 54]), RNS+Rв.з. - суммарное магнитное сопротивление постоянного магнита и воздушного зазора, ω, h - число витков основной катушки и плечо ее крепления.
Способ-аналог состоит в выборе параметров системы, при котором обеспечивается равенство коэффициента К1 коэффициенту К2, где К1 - коэффициент пропорциональности крутизны характеристики датчика момента акселерометра углу поворота подвижного узла α, КДМ=К1α, коэффициент К2 - коэффициент пропорциональности между компенсационным моментом, создаваемым введенной в конструкцию обмоткой с числом витков ω1, и квадратом тока I2, который создает электромагнитную силу, вызывающую нелинейность масштабного коэффициента.
Недостатком способа-аналога является невозможность полного устранения нелинейности масштабного коэффициента в виду невозможности точного обеспечения требования К1=К2.
В качестве способа-прототипа выбран способ исключения нелинейности масштабного коэффициента маятникового акселерометра, вызванной возникновением электромагнитной силы, асимметрией магнитной системы моментного датчика акселерометра, состоящий в «выполнении контура разгрузки акселерометра в виде импульсной следящей системы, обеспечивающей постоянство амплитуды тока, протекающего в обмотке датчика момента» [1, стр. 55, 160-164]. При такой импульсной системе исключение нелинейности масштабного коэффициента за счет минимизации электромагнитной силы обеспечивается «изменением времени протекания в обмотке датчика момента положительно и отрицательно направленных токов благодаря использованию широтно-импульсной модуляции».
Действительно, для маятникового акселерометра линейных ускорений, у которого системой обратной связи подаются в датчик момента импульсы тока постоянной амплитуды, основное уравнение записывается в виде:

где m⋅l - маятниковость, а - линейное ускорение вдоль оси чувствительности акселерометра, KДМ - крутизна характеристики датчика момента, Iср - среднее значение тока за определенный отрезок времени, определяемый типом модулятора. Поскольку при использовании, например, широтно-импульсной модуляции, среднее значение тока зависит от отношения длительности импульса постоянной амплитуды, формируемой модулятором, к периоду дискретизации, а импульсы могут иметь противоположный знак, то обеспечить обнуление электромагнитной силы, пропорциональной квадрату тока, можно, выбирая определенное соответствие длительностей интервалов положительных и отрицательных импульсов тока.
Способ-прототип, реализованный с помощью устройства, описанного в [1, стр. 162-163, рис. 6.7 а)], имеет недостатки:
1. Способ-прототип, исключая нелинейность масштабного коэффициента акселерометра, вызванную электромагнитной силой, создает нелинейность вследствие несоответствия между цифровым сигналом на выходе схемы и импульсами тока, поступающими в цепь обратной связи. В установившемся режиме в акселерометре, система обратной связи которого формирует импульсный ток Iср, поступающий в датчик момента, а выходной сигнал формируется в виде количества импульсов Nвых (цифрового сигнала), пропорционального среднему значению тока, выполняются соотношения (4) и (5).

где Fвых=1/Nвых, КМ - масштабный коэффициент акселерометра. Нарушение соответствия между Iср средним значением тока, поступающим в датчик момента, и средней за период Т0 частотой Fвых и соответствующим Nвых - количеством импульсов, т.е. цифровым сигналом на выходе схемы означает нелинейность масштабного коэффициента. [1, стр. 161, рис. 6.6)].
Действительно, поскольку устройство, реализующее способ-прототип [1, стр. 162-163, рис. 6.7 а)], содержащее широтно-импульсный модулятор в виде преобразователя «напряжение - временной интервал», выполнено на аналоговых компонентах, то для того, чтобы начало и конец импульса тока обратной связи совпадали с передним (или задним) фронтом заполняющих импульсов fзап.0, поступающих в ЦВМ и формирующих выходной цифровой сигнал, в способ-прототип приходится вводить специальные операции для обеспечения соответствия между количеством импульсов, заполняющих временной интервал, и импульсами тока, поступающими в цепь обратной связи.
Это достигается путем формирования в способе-прототипе вспомогательных импульсов, к которым предъявляются требования к их частоте и фазовой ориентации относительно заполняющих (счетных) импульсов.
Введение вспомогательных импульсов в способ-прототип исключает нелинейность масштабного коэффициента акселерометра от несоответствия между количеством импульсов, заполняющих временной интервал, и импульсами тока, поступающими в датчик момента цепи обратной связи, но это приводит к усложнению устройства, реализующего способ-прототип.
2. Способ-прототип обладает еще одним недостатком, для устранения которого в способе-прототипе не предложено никаких операций.
Дело в том, что устройство, реализующее способ-прототип [1, стр. 162-163, рис. 6.7 а)], как и любая схема устройства, формирующего импульсы тока постоянной амплитуды для подачи в датчик момента, содержит стабилизатор тока и переключатель. При формировании импульсов тока в стабилизаторе имеет место переходный процесс, вследствие чего форма импульса тока отличается от прямоугольной. Любой переключатель тока создает задержку, что приводит к возрастанию амплитуды тока в переходном процессе. Оба этих фактора приводят к несоответствию среднего значения тока Iср, поступающего в датчик момента за период дискретизации, расчетному значению, а, следовательно, приводят к нелинейности масштабного коэффициента.
Задачей изобретения является обеспечение линейности масштабного коэффициента маятникового акселерометра компенсационного типа.
Технический результат достигается тем, что в способе обеспечения линейности масштабного коэффициента маятникового акселерометра компенсационного типа, заключающемся в том, что выполняют модуляцию тока датчика момента с периодом дискретизации Т0, обеспечивают постоянство амплитуды Iа и определенную длительность τраб рабочих импульсов тока, подаваемых в датчик момента и соответствующих измеряемому линейному ускорению, интервалы времени Т0 и τраб заполняют целым числом счетных импульсов, для чего формируют и подают в систему обратной связи акселерометра вспомогательные импульсы определенной частоты и фазового расположения по отношению к счетным импульсам, согласно изобретению на каждом такте дискретизации n⋅Т0 посредством микроконтроллера обратной связи акселерометра в соответствии с алгоритмом разностного уравнения, рассчитывают цифровой код IДМ(n⋅T0), который соответствует среднему за период Т0 значению тока датчика момента Iср; формируют последовательность рабочих импульсов, формируют два равных по величине вспомогательных импульса длительностью τвсп и две равные по величине паузы τпауз, при этом длительность рабочего импульса τраб(n⋅Т0) на «n»-м такте определяется выражением
где Iдм (n⋅Т0) - цифровой код уровня сигнала на входе широтно-импульсного модулятора на том же такте, IДМ max - цифровой код, определяемый соотношением:
 , длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы тпауз выбрана в соответствии с выражением
, длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы тпауз выбрана в соответствии с выражением  , где минимальная длительность паузы равна:
, где минимальная длительность паузы равна:  , обеспечивают формирование постоянной и высокостабильной величины амплитуды Iа рабочего и вспомогательных импульсов, размещают вспомогательные импульсы либо: в начале каждого «nТ0»-ого такта дискретизации размещают первый вспомогательный импульс тока; к первому вспомогательному импульсу присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса; либо: на «n⋅Т0»-м такте дискретизации размещают первый вспомогательный импульс тока; к этому вспомогательному импульсу тока присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения: , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса, а в начале следующего «(n+1)⋅T0»-го такта дискретизации размещают первый вспомогательный импульс, знак которого совпадает со знаком второго вспомогательного импульса «n⋅Т0»-ого такта дискретизации, через интервал времени, обеспечивающий выполнение соотношения , размещают второй вспомогательный импульс «(n+1)⋅T0»-го такта, знак которого соответствует знаку рабочего импульса, который формируют и присоединяют ко второму вспомогательному импульсу.
, обеспечивают формирование постоянной и высокостабильной величины амплитуды Iа рабочего и вспомогательных импульсов, размещают вспомогательные импульсы либо: в начале каждого «nТ0»-ого такта дискретизации размещают первый вспомогательный импульс тока; к первому вспомогательному импульсу присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса; либо: на «n⋅Т0»-м такте дискретизации размещают первый вспомогательный импульс тока; к этому вспомогательному импульсу тока присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения: , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса, а в начале следующего «(n+1)⋅T0»-го такта дискретизации размещают первый вспомогательный импульс, знак которого совпадает со знаком второго вспомогательного импульса «n⋅Т0»-ого такта дискретизации, через интервал времени, обеспечивающий выполнение соотношения , размещают второй вспомогательный импульс «(n+1)⋅T0»-го такта, знак которого соответствует знаку рабочего импульса, который формируют и присоединяют ко второму вспомогательному импульсу.
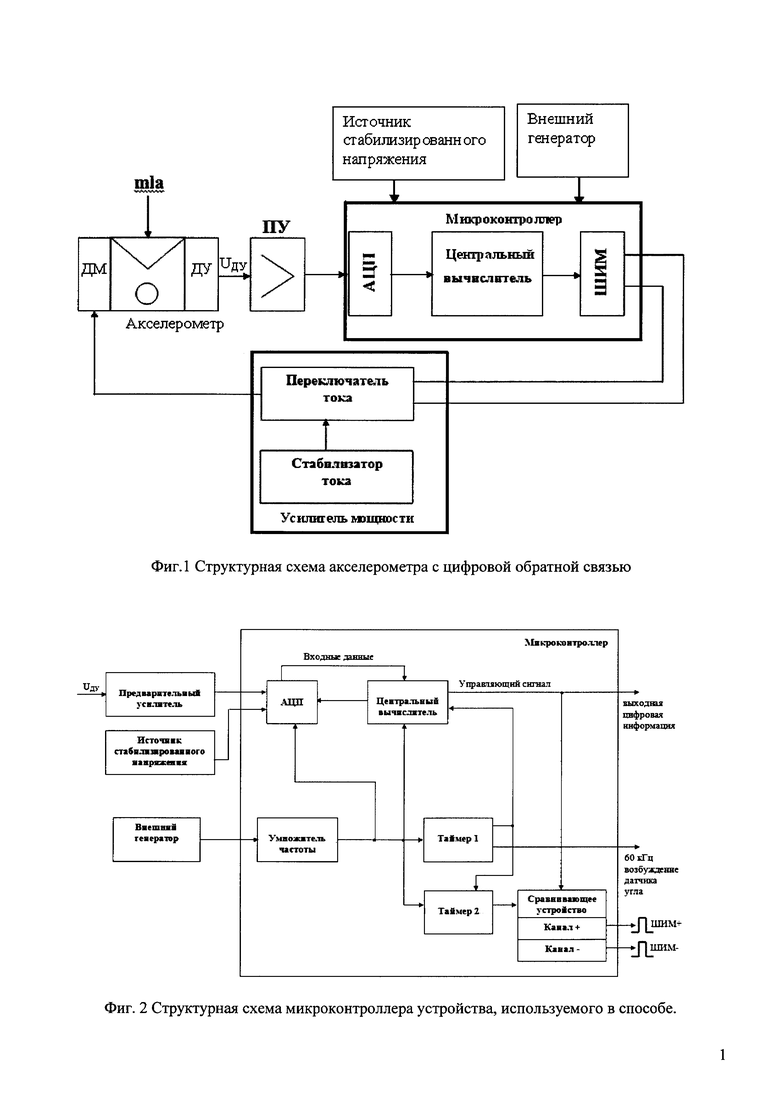
На фиг. 1 приведена структурная схема устройства - маятникового акселерометра с цифровой обратной связью. Цифровая обратная связь реализуется микроконтроллером и усилителем мощности, в состав которого входит стабилизатор тока и переключатель.
На фиг. 2 представлена структурная схема микроконтроллера. Микроконтроллер, помимо центрального вычислителя (процессора), имеет периферию, т.е. кристаллы, на которых выполнены следующие элементы: АЦП, центральный вычислитель, сложные программируемые логические микросхемы, на которых организованы широтно-импульсный модулятор (ШИМ), первый таймер и второй таймер, умножитель частоты; ШИМ образуют второй таймер и сравнивающее устройство.
Способ включает выполнение следующих операций:
1. Центральный вычислитель микроконтроллера на каждом такте дискретизации n⋅Т0, где Т0 - период дискретизации, в соответствии с алгоритмом разностного уравнения рассчитывает цифровой код IДМ(n⋅Т0), который соответствует среднему за период Т0 значению тока датчика момента, который, в свою очередь, пропорционален измеряемому линейному ускорению.
Использование алгоритмов, задаваемых разностным уравнением, которое записывается для систем регулирования цифровых систем, широко известно и приведено, например, в [3, стр. 451, выражение (15.96)].
2. Для расчета цифрового кода IДМ(n⋅Т0) центральный вычислитель микроконтроллера использует значения цифрового кода на предыдущих шагах IДМ[(n-1)⋅Т0], IДМ[(n-2)⋅Т0], а также значения цифровых кодов напряжения на выходе АЦП микроконтроллера UДУ(n⋅Т0), UДУ[(n-1)⋅Т0], UДУ[(n-2)⋅Т0] с коэффициентами, записанными в разностном уравнении.
Разностное уравнение имеет вид:
IДМ(nТ0)=К1⋅IДМ[(n-1)Т0]-К2⋅IДМ[(n-2)Т0]+R1⋅UДУ(n⋅Т0)-R2⋅UДУ[(n-1)Т0]+
+R3⋅UДУ[(n-2)Т0],
где К1,2 и R1,2,3 - численные значения коэффициентов, которые формируются при построении разностного уравнения для каждого конкретного значения параметров акселерометра и цифрового усилителя обратной связи.
3. ШИМ организованный внутри микроконтроллера, в соответствии с сигналом IДМ(n⋅Т0) формирует последовательность импульсов, амплитуда которых постоянна и определяется напряжением питания микроконтроллера, а длительность равна τраб(n⋅Т0). Рабочие импульсы длительности τраб(n⋅Т0) формируются по двум каналам - положительному и отрицательному в соответствии со знаком измеряемого линейного ускорения. Длительность интервала рабочего импульса τраб(n⋅Т0) на «n»-м такте определяется выражениями  , где Iдм (n-Т0) - цифровой код уровня сигнала на входе широтно-импульсного модулятора на том же такте, IДМ max - цифровой код, определяемый соотношением
, где Iдм (n-Т0) - цифровой код уровня сигнала на входе широтно-импульсного модулятора на том же такте, IДМ max - цифровой код, определяемый соотношением  .
.
4. Таймеры микроконтроллера формируют два равных по величине вспомогательных импульса длительностью τвсп и две равные по величине паузы длительностью τпауз. Длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы τпауз выбрана в соответствии с выражением , где минимальная длительность паузы равна .
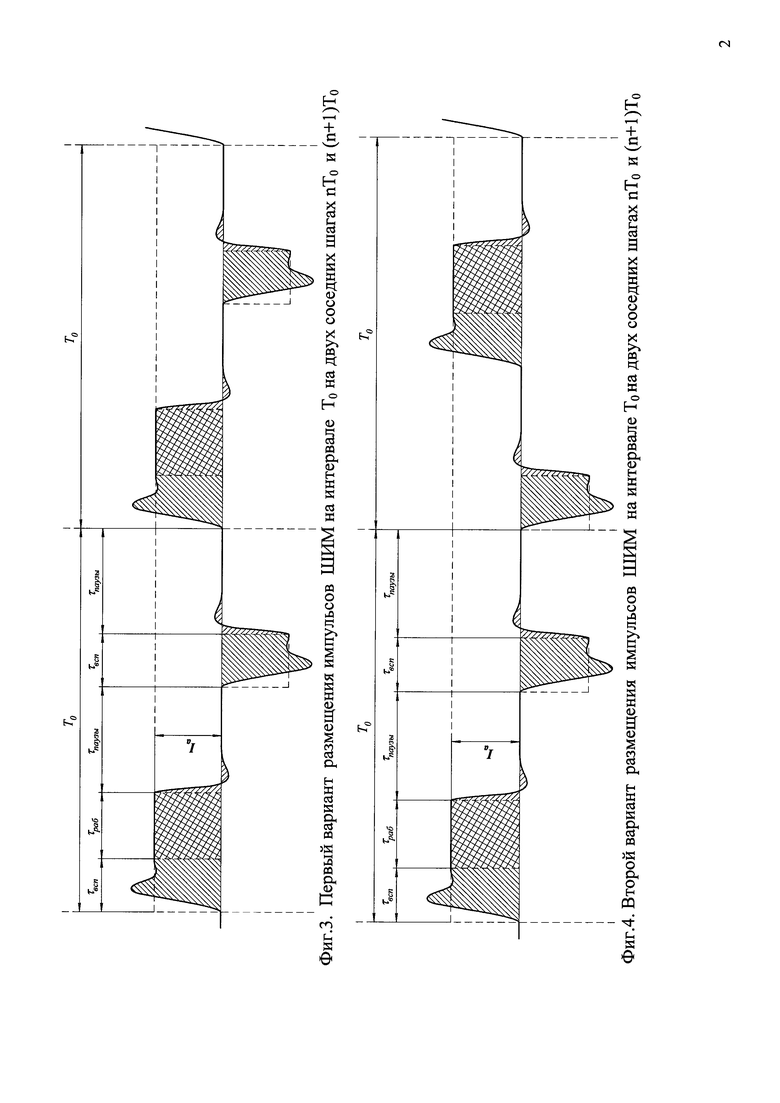
Длительность каждого вспомогательного импульса τвсп должна быть такой, чтобы она была равна времени переходного процесса по переднему фронту рабочего импульса либо несколько превышала ее (см. фиг. 3 и фиг. 4). Основная цель введения вспомогательных импульсов состоит в том, чтобы они выдавались на время переходного процесса, который возникает по переднему фронту рабочего импульса. Завершение переходного процесса должно совпадать с задним фронтом вспомогательного импульса, с которым совмещают передний фронт рабочего импульса.
Паузы необходимы для того, чтобы фронты импульсов ШИМ не попадали на момент измерения сигнала, иначе наводки от фронтов мощных импульсов добавят большую ошибку в измерение сигнала.
Равенство 0,5⋅(Т0-2 τвсп-τраб)=τпауз должно быть обеспечено, чтобы длительность обеих пауз была одинакова и длительности интервала Т0 было достаточно для размещения рабочего импульса, двух одинаковых вспомогательных импульсов и двух одинаковых пауз. Неравенство  носит рекомендательный характер, как обеспечившее при экспериментальной проверке наилучший результат.
носит рекомендательный характер, как обеспечившее при экспериментальной проверке наилучший результат.
5. Интервалы времени Т0, τвсп, τпауз формируются целым числом счетных импульсов.
В способе-прототипе возникали проблемы при решении аналогичной задачи, которые приводили к несоответствию между количеством импульсов, заполняющих временной интервал, и импульсов тока, поступающих в цепь обратной связи. При наличии цифровой обратной связи в акселерометре эта задача решается программным способом, поскольку в микроконтроллере обеспечивается тактовая синхронизация ядра процессора, таймеров, реализующих временные интервалы Т0, τвсп, τпауз, внутреннего АЦП, преобразующего аналоговый сигнал с выхода предварительного усилителя, пропорциональный величине измеряемого ускорения, в цифровой код.
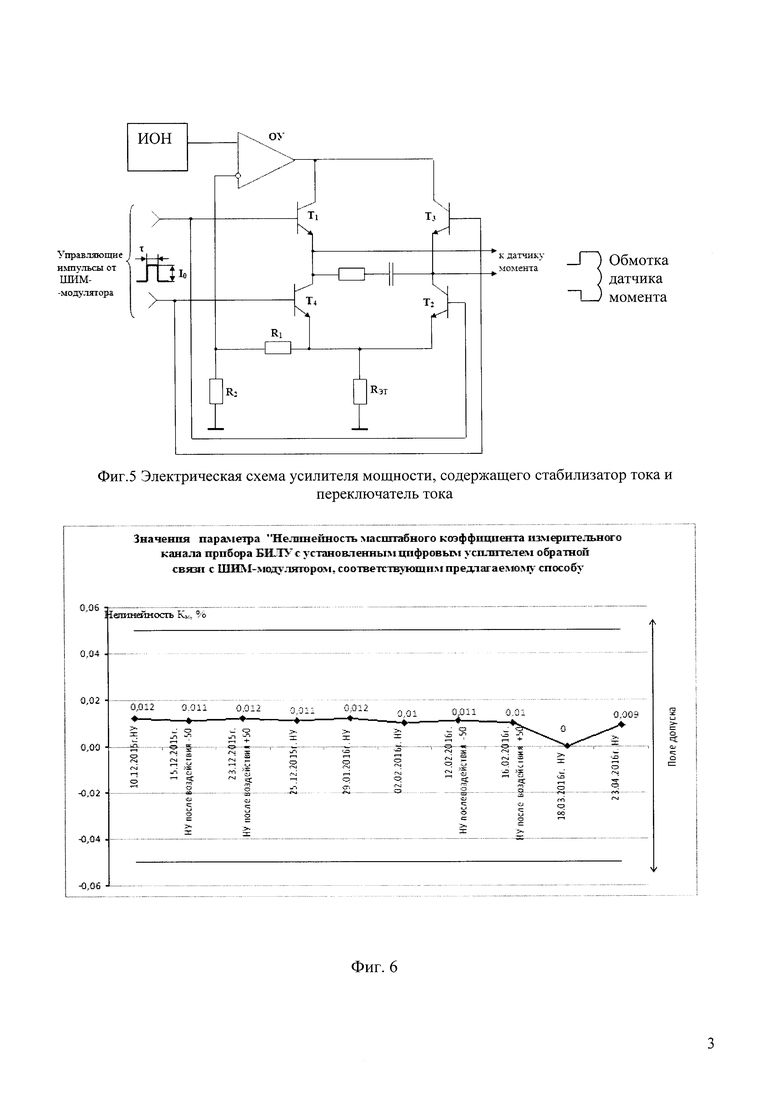
6. Обеспечивают с помощью стабилизатора тока устройства формирование постоянной и высокостабильной величины амплитуды Iа рабочего и вспомогательных импульсов. Стабилизатор тока (см. фиг. 1) входит в состав усилителя мощности, который формирует импульсы тока, подаваемого в обмотку датчика момента. Операционный усилитель и резисторы Rэт, R1, R2 (фиг. 5) образуют обратную связь и вместе с источником опорного напряжения (ИОН) образуют стабилизатор тока. Эти элементы выбирают с повышенными требованиями к стабильности их параметров, чем и обеспечивается высокая стабильность амплитуды Iа рабочего и вспомогательных импульсов.
7. Выполняют размещение рабочего и вспомогательных импульсов тока внутри каждого периода дискретизации Т0 по одному из двух вариантов:
Вариант 1 (фиг.3)
В начале каждого «nТ0»-го такта дискретизации размещают вспомогательный импульс амплитуды Iа, длительности τвсп, знак которого соответствует знаку рабочего импульса тока амплитуды Iа и длительности τраб(nТ0); к этому вспомогательному импульсу тока присоединяют рабочий импульс, амплитуда которого равна Iа и длительность τраб(nТ0). Присоединение выполняют таким образом, чтобы задний фронт вспомогательного импульса был совмещен с передним фронтом рабочего импульса. Через промежуток времени, при котором выполняется соотношение , размещают на периоде Т0 второй вспомогательный импульс амплитуды Iа, длительность которого равна τвсп, а знак противоположен знаку первого вспомогательного импульса;
Вариант 2 (фиг. 4)
На каждом «nТ0» такте дискретизации повторяют размещение импульсов Варианта 1.
В начале следующего «(n+1)Т0»-го такта дискретизации размещают вспомогательный импульс амплитуды Iа, знак и длительность которого совпадают со знаком и длительностью второго вспомогательного импульса «nТ0»-ого такта дискретизации, через интервал времени, при котором выполняется соотношение , на «n+1»-м такте дискретизации размещают второй вспомогательный импульс амплитудой Iа, длительности τвсп, знак которого соответствует знаку рабочего импульса; к этому вспомогательному импульсу тока присоединяют рабочий импульс, амплитуда которого равна Ia, длительность равна τраб(n⋅Т0).
8. Обеспечивают указанную последовательность размещения вспомогательных и рабочих импульсов по варианту 1 либо 2 на всех тактах дискретизации в течение всего времени измерения акселерометром линейного ускорения.
Рассмотрим, каким образом при использовании способа обеспечивается линейность масштабного коэффициента.
Задача импульсов, поступающих с выхода ШИМ на вход усилителя мощности, содержащего стабилизатор тока и переключатель, только одна: обеспечить открытие переключателя тока усилителя мощности на промежуток времени, равный указанным строго регламентированным значениям τ(n⋅T0)=τраб(n⋅Т0).
Импульсы, поступающие с выхода ШИМ на вход усилителя мощности, имеют строго прямоугольную форму (см. фиг. 3 и фиг. 4). В стабилизаторе тока применяют прецизионную электронную компонентную базу для обеспечения с высокой стабильностью постоянства амплитуды тока в импульсе Iа для обеспечения высокостабильного среднего за период дискретизации Т0 значения тока, пропорционального измеряемому линейному ускорению. Однако, индуктивность датчика момента, наличие переходных процессов в стабилизаторе тока приводят к отклонению реальной формы импульса тока от прямоугольной.
В переключателе тока имеет место временная задержка, что приводит к перерегулированию и дополнительному отклонению формы импульса от прямоугольной. Переходные процессы по переднему и заднему фронтам рабочего импульса τраб(n⋅Т0), если не принять дополнительных мер, приводят к отклонению площади реального импульса от площади идеального импульса, которая должна быть равна Iа⋅τраб(n⋅Т0), т.е. к отклонению фактической величины среднего значения тока за период дискретизации от расчетного значения и, как следствие, к нелинейности масштабного коэффициента акселерометра.
Действительно, в установившемся режиме измерения акселерометром линейного ускорения а выполняется равенство маятникового момента ml⋅a и компенсирующего момента, создаваемого датчиком момента при протекании среднего за интервал времени Т0 тока Iср.
Среднее значение тока Iср выражается через значения тока в импульсе Iа, длительность рабочего импульса τраб(n⋅Т0) и период работы ШИМ, равный периоду дискретизации Т0:
Iср=Iа⋅τраб(nТ0)/Т0
С другой стороны, измеряемое линейное ускорение пропорционально среднему за период Т0 значению частоты Fвых выходной информации и определено выражением (5), если выходная информация представляет собой унитарный код.
Нарушение соответствия между Iср средним значением тока, поступающим в датчик момента, и частотой Fвых и количеством импульсов выходной информации Nвых, т.е. цифровым сигналом на выходе схемы означает нелинейность масштабного коэффициента.
Произведение Ia⋅τраб(n⋅T0) - это площадь идеального импульса прямоугольной формы, которая искажается переходными процессами (см. фиг. 3 и 4).
Длительность рабочего импульса τраб(n⋅Т0) меняется в зависимости от измеряемого линейного ускорения, поэтому относительная величина искажения площади идеального импульса практически не изменяющейся площадью переходных процессов будет меняться, это и является физическим объяснением влияния переходных процессов на нелинейность масштабного коэффициента акселерометра.
Идея, которая реализуется в предлагаемом способе и обеспечивает линейность масштабного коэффициента, следующая.
Если в течение периода Т0 ШИМ подавать по одному положительному и отрицательному вспомогательному импульсу одинаковой длительности τвсп, приближенно равной длительности переходного процесса по переднему фронту импульса тока датчика момента, и одинаковой амплитуды Iа, то средняя величина тока за период Т0 будет равна нулю с точностью, определяемой неодинаковостью фронтов вспомогательных импульсов. Если же длительность одного из импульсов увеличить на некоторую величину, то очевидно, средний ток за период ШИМ будет пропорционален этой самой величине.
Следовательно, требуемая линейность преобразования может быть достигнута, если в течение периода ШИМ подавать два одинаковых вспомогательных импульса разной полярности, а к одному из них присоединять рабочий импульс длительности τраб(nТ0), то переходные процессы не будут искажать площадь рабочего импульса Iа⋅τраб(nТ0), т.к. переходные процессы на фронтах импульсов взаимно компенсируются с определенной точностью.
Если из-за неодинаковости переходных процессов площади вспомогательных импульсов отличаются, то это приведет к возникновению момента, действующего на маятник. Но этот момент постоянен на любом из тактов n⋅Т0, проявляется как смещение нуля, которое легко компенсируется с помощью контроллера.
Таким образом, в результате введения вспомогательных импульсов рабочий импульс приобретает форму прямоугольника с площадью Iа⋅τраб(nТ0), чему соответствует уменьшение на порядок нелинейности масштабного коэффициента акселерометра.
На фиг. 3 представлено размещение вспомогательных импульсов и рабочего при организации размещения по варианту 1, а на фиг. 4 - при организации по варианту 2. Аналитическое доказательство эффективности способа громоздко и сложно математически. Экспериментальные проверки были проведены в большом объеме на макете с чувствительным элементом акселерометра и цифровой обратной связью и на измерительном канале модернизируемого прибора «безобогревной измеритель линейного ускорения» (БИЛУ).
Прибор БИЛУ представляет собой шестиканальный измеритель линейного ускорения, который эксплуатируется в составе системы управления спускаемого аппарата корабля «Союз - ТМА». Каждый измерительный канал содержит акселерометр с аналоговым усилителем обратной связи и преобразователем «напряжение-частота». Техническое решение измерительного канала прибора БИЛУ запатентовано [4]. Модернизация прибора состоит в замене аналогового усилителя обратной связи акселерометра и преобразователя «напряжение-частота» на цифровой усилитель обратной связи с ШИМ, что обеспечит не только термоинвариантность масштабного коэффициента и смещения нуля, которые в существующем приборе обеспечивались реализацией патента [4], но и существенным повышением линейности масштабного коэффициента за счет реализации предлагаемого способа. Термоинвариантность параметров прибора при наличии цифровой обратной связи обеспечивается внесением в выходной цифровой код, вычисляемый процессором, поправок по информации термодатчика акселерометра, подключенного к внутреннему АЦП микроконтроллера. Это техническое решение очевидно и поэтому в заявляемом способе не отражено.
Результаты экспериментальной проверки способа:
Чувствительный элемент акселерометра имеет характеристики:
Маятниковость m⋅l=0,15 Г⋅см при ускорении а=1 g. Крутизна характеристики датчика момента Кдм=150 Г⋅см/А=0,15 Г⋅см/мА. Это определяет характеристику чувствительного элемента 1 мА/g. Необходимо обеспечить диапазон измерения ±10g. Для реализации устройства применены: отечественный микроконтроллер 1986ВЕ9ЗУ (ЗАО ПКК «Миландр»), внешний генератор - кварцевый резонатор РК535-6АМ-8М-П10 (8 МГц), источник опорного напряжения 1369 ЕС01А4 («Интеграл» Белоруссия), операционный усилитель 544УД16УЗ («Восток» Новосибирск) для реализации стабилизатора тока, переключатель мостовой, выполненный на полевых транзисторах 2П524А9 («Интеграл», Белоруссия).
В микроконтроллере с помощью умножителя частоты частота 8 МГц внешнего генератора увеличена в 10 раз, тактовая частота синхронизации - частота следования счетных импульсов выбрана 80 МГц. В соответствии с требованиями теоремы Котельникова-Шеннона период дискретизации Т0 выбран Т0=2⋅10-4 с (частота дискретизации 5 кГц). Величина постоянной в импульсе амплитуды тока Iа выбрана Iа=16 мА. На периоде Т0 размещается 16000 счетных импульсов; длительность рабочего импульса при измерении 10g имеет максимальное значение, равное τраб(n⋅Т0)max, чему соответствует размещение на интервале траб(n-Т0)max 12000 счетных импульсов, τраб(nТ0)max⇔12000 сч. имп. При измерении линейных ускорений в диапазоне от 0 до +10g величина τраб(n⋅Т0) изменяется в диапазоне от 0 до 12000 счетных импульсов. При измерении линейных ускорений в диапазоне от 0 до - 10g величина τраб(n⋅Т0) изменяется в тех же пределах, но импульсы идут по отрицательному каналу. Длительность каждого из двух вспомогательных импульсов τвсп выбрана такой, что на интервале τвсп размещается 1500 счетных импульсов.
τвсп⇔1500 сч. имп.
Длительность минимальных пауз τпауз выбрана такой, что на каждой паузе размещается по 500 счетных импульсов. τпауз⇔500 сч. имп.
Условие (8) выполняется.
Испытания измерительного канала прибора БИЛУ с установленным в канал чувствительным элементом акселерометра и цифровым усилителем обратной связи с ШИМ - модулятором, в котором реализован заявляемый способ, испытывался следующим образом. Прибор устанавливался на оптическую делительную головку OPTIGON таким образом, чтобы при разворотах прибора последовательно на углы ±μр с помощью оптической делительной головки на ось чувствительности акселерометра измерительного канала проектировались составляющие вектора ускорения силы тяжести, равные ξкg: +1g, +0,942809678g, +0,57735041g, +0,333331531g, -0,333331531g, -0,57735041g, -0,942809678g, -1g.
Для каждого действующего по оси чувствительности значения ускорения силы тяжести в пределах ±1g измерялся масштабный коэффициент Км±ξкg=ξкg/fξкg - мм/с/имп, где ξкg - действующее по оси чувствительности линейное ускорение мм/с, fξкg - среднее за период Т0 значение частоты следования импульсов выходной информации имп./с. По значениям Км±ξкg вычислялось среднее значение масштабного коэффициента Км и нелинейность масштабного коэффициента как максимальное отклонение значений Км±ξкg от среднего Км.
Поскольку для измерителей линейных ускорений, эксплуатируемых в системах управления ракетно-космических объектов, любое техническое решение должно обладать временной стабильностью, а также стабильностью во всем рабочем диапазоне температур, в том числе и после воздействия дестабилизирующих факторов (например, после транспортирования при повышенных температурах), измерительный канал прибора БИЛУ с установленным в него акселерометром с цифровой обратной связью и ШИМ по заявляемому способу испытывался в течение длительного времени как в нормальных условиях (НУ), так и при крайних значениях температур рабочего диапазона прибора (+10°С…+40°С), так и после воздействия дестабилизирующих факторов в течение 12 часов - после воздействия температур минус 50°С и +50°С. Для акселерометра измерительного канала была при этом выполнена компенсация температурных погрешностей масштабного коэффициента и смещения нуля, которая при наличии цифровой обратной связи является тривиальной операцией.
Результаты приведены в Таблице 1 и на графике - фиг. 6.
При использовании первого варианта размещения вспомогательных импульсов (по Фиг. 3) в нормальных условиях нелинейность масштабного коэффициента не превышает 0,012%. (Измерения в течение декабря 2015-марта 2016 гг.). В марте 2016 г. программным способом было выполнено перепрограммирование канала с размещением вспомогательных импульсов по варианту 2. (Таблица 1, последние две сточки).
Нелинейность масштабного коэффициента в нормальных условиях имеет величину 0,009%. Без введения вспомогательных импульсов по одному из вариантов для того же измерительного канала нелинейность масштабного коэффициента достигала 0,05%-0,07%.
Таким образом, заявлен способ обеспечения линейности масштабного коэффициента маятникового акселерометра компенсационного типа, заключающийся в том, что выполняют модуляцию тока датчика момента с периодом дискретизации Т0, обеспечивают с помощью стабилизатора тока и переключателя тока усилителя мощности обратной связи акселерометра постоянство амплитуды Iа и определенную длительность τраб рабочих импульсов тока, подаваемых в датчик момента и соответствующих измеряемому линейному ускорению, интервалы времени Т0 и τраб заполняют целым числом счетных импульсов, для чего формируют и подают в систему обратной связи вспомогательные импульсы определенной частоты и фазового расположения по отношению к счетным импульсам.
Отличительная особенность заключается в том, что на каждом такте дискретизации n⋅Т0 посредством микроконтроллера обратной связи акселерометра в соответствии с алгоритмом разностного уравнения вида IДМ(nТ0)=К1⋅IДМ[(n-1)Т0]-К2⋅IДМ[(n-2)Т0]+R1⋅UДУ(nТ0)-R2⋅UДУ[(n-1)Т0]+R3⋅UДУ[(n-2)Т0],, где IДМ(nT0) - цифровой код тока датчика момента на такте n⋅Т0, UДУ(nТ0) - цифровой код напряжения на выходе АЦП микроконтроллера на том же такте, IДМ[(n-1)Т0], IДМ[(n-2)Т0] - цифровые коды тока датчика момента и UДУ[(n-1)Т0], UДУ[(n-2)Т0] - цифровые коды напряжения на выходе АЦП микроконтроллера на предыдущих тактах, К1,2 и R1,2,3 - численные значения коэффициентов для каждого конкретного значения параметров акселерометра и цифрового усилителя обратной связи, рассчитывают цифровой код IДМ(n⋅Т0), который соответствует среднему за период Т0 значению тока датчика момента Iср, который пропорционален измеряемому линейному ускорению; посредством широтно-импульсного модулятора микроконтроллера формируют последовательность рабочих импульсов, посредством таймера микроконтроллера формируют два равных по величине вспомогательных импульса длительностью τвсп и две равные по величине паузы τпауз, при этом длительность рабочего импульса τраб(n⋅Т0) на «n»-м такте определяется выражением
где Iдм (n-Т0) - цифровой код уровня сигнала на входе широтно-импульсного модулятора на том же такте, IДМ max - цифровой код, определяемый соотношением
 , длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы τпауз выбрана в соответствии с выражением , где минимальная длительность паузы равна , обеспечивают с помощью стабилизатора тока устройства формирование постоянной и высокостабильной величины амплитуды Iа рабочего и вспомогательных импульсов, размещают вспомогательные импульсы либо: в начале каждого «nТ0»-го такта дискретизации размещают первый вспомогательный импульс тока; к первому вспомогательному импульсу присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса; либо: на «n⋅Т0»-м такте дискретизации размещают первый вспомогательный импульс тока; к этому вспомогательному импульсу тока присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса, а в начале следующего «(n+1)⋅T0»-го такта дискретизации размещают первый вспомогательный импульс, знак которого совпадает со знаком второго вспомогательного импульса «n⋅Тo»-го такта дискретизации, через интервал времени, обеспечивающий выполнение соотношения , размещают второй вспомогательный импульс «(n+1)⋅To»-го такта, знак которого соответствует знаку рабочего импульса, который формируют и присоединяют ко второму вспомогательному импульсу.
, длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы τпауз выбрана в соответствии с выражением , где минимальная длительность паузы равна , обеспечивают с помощью стабилизатора тока устройства формирование постоянной и высокостабильной величины амплитуды Iа рабочего и вспомогательных импульсов, размещают вспомогательные импульсы либо: в начале каждого «nТ0»-го такта дискретизации размещают первый вспомогательный импульс тока; к первому вспомогательному импульсу присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса; либо: на «n⋅Т0»-м такте дискретизации размещают первый вспомогательный импульс тока; к этому вспомогательному импульсу тока присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса, а в начале следующего «(n+1)⋅T0»-го такта дискретизации размещают первый вспомогательный импульс, знак которого совпадает со знаком второго вспомогательного импульса «n⋅Тo»-го такта дискретизации, через интервал времени, обеспечивающий выполнение соотношения , размещают второй вспомогательный импульс «(n+1)⋅To»-го такта, знак которого соответствует знаку рабочего импульса, который формируют и присоединяют ко второму вспомогательному импульсу.
Литература:
1. Коновалов С.Ф. Теория виброустойчивости акселерометров. М.: Машиностроение. 1991 г.
2. Федоров С.М., Литвинов А.П. Автоматические системы с цифровыми управляющими машинами. Москва, Ленинград. «Энергия», 1965.
3. Бессекерский В.А, Попов Е.П. Теория систем автоматического регулирования, Москва, Наука, 1975.
4. Патент №2528119 от 10.09. 2014. Заявка №2012156732 от 26.12.2012. Термоинвариантный измеритель линейного ускорения. / Калихман Л.Я., Калихман Д.М., Нахов С.Ф., Поздняков В.М., Чурилин Ю.С., Рыжков B.C., Самитов P.M. // Б.И. №25 2014.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа | 2016 |
|
RU2627970C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
Способ обеспечения линейности масштабного коэффициента маятникового акселерометра компенсационного типа относится к измерительной технике. Способ основан на использовании цифровой обратной связи, реализуемой микроконтроллером, в котором программным способом реализован ШИМ; ШИМ формирует последовательность рабочих импульсов, длительность которых равна τраб(n⋅T0), а таймер микроконтроллера формирует два равных по величине вспомогательных импульса длительностью τвсп и две равные по величине паузы длительностью τпауз. В способе задается правило выбора длительности интервала рабочего импульса τраб(n⋅T0), длительности вспомогательных импульсов и пауз на «n»-м такте дискретизации, а также правило взаимного размещения на каждом «n»-м такте дискретизации рабочего, вспомогательных импульсов и пауз. В начале каждого «nТ0»-го такта дискретизации размещают первый вспомогательный импульс тока; к этому вспомогательному импульсу тока присоединяют рабочий импульс; через определенный промежуток времени на интервале Т0 размещают второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса. Среднее значение тока Iср, поступающего в обмотку датчика момента, выражается через постоянную по величине амплитуду тока в импульсе Iа, длительность рабочего импульса τраб(nТ0) и период Т0 работы ШИМ, т.е. Iср=Iа⋅τраб(nТ0)/Т0. Произведение Iа⋅τраб(n⋅Т0) - это площадь идеального импульса прямоугольной формы, которая искажается переходными процессами на передних фронтах тока в обмотку датчика момента. Требуемая линейность преобразования может быть достигнута, если в течение периода ШИМ подавать два одинаковых вспомогательных импульса разной полярности, а к одному из них присоединять рабочий импульс длительности τраб(nT0), то переходные процессы не будут искажать площадь рабочего импульса Iа⋅τраб(nТ0), т.к. переходные процессы на передних фронтах импульсов взаимно компенсируются с определенной точностью, а величина среднего за период Т0 тока, поступающего в обмотку датчика момента, будет пропорциональна только длительности рабочего импульса, т.е. измеряемому линейному ускорению. Техническим результатом изобретения является обеспечение линейности масштабного коэффициента маятникового акселерометра компенсационного типа. 1 табл., 6 ил.
Способ обеспечения линейности масштабного коэффициента маятникового акселерометра компенсационного типа, заключающийся в том, что выполняют модуляцию тока датчика момента с периодом дискретизации Т0, обеспечивают с помощью стабилизатора тока и переключателя тока усилителя мощности обратной связи акселерометра постоянство амплитуды Ia и определенную длительность τраб рабочих импульсов тока, подаваемых в датчик момента и соответствующих измеряемому линейному ускорению, интервалы времени Т0 и τраб заполняют целым числом счетных импульсов, для чего формируют и подают в систему обратной связи вспомогательные импульсы определенной частоты и фазового расположения по отношению к счетным импульсам, отличающийся тем, что на каждом такте дискретизации n⋅Т0 посредством микроконтроллера обратной связи акселерометра в соответствии с алгоритмом разностного уравнения вида IДМ(nT0)=К1⋅IДМ[(n-1)Т0]-К2⋅IДМ[(n-2)Т0]+R1⋅UДУ(nT0)-R2⋅UДУ[(n-1)Т0]+R3⋅UДУ[(n-2)Т0], где IДМ(nT0) - цифровой код тока датчика момента на такте n⋅T0, UДУ(nT0) - цифровой код напряжения на выходе АЦП микроконтроллера на том же такте, IДМ[(n-1)T0], IДМ[(n-2)T0] - цифровые коды тока датчика момента и UДУ[(n-1)Т0], UДУ[(n-2)T0] - цифровые коды напряжения на выходе АЦП микроконтроллера на предыдущих тактах, К1,2 и R1,2,3 - численные значения коэффициентов для каждого конкретного значения параметров акселерометра и цифрового усилителя обратной связи, рассчитывают цифровой код IДМ(n⋅T0), который соответствует среднему за период Т0 значению тока датчика момента Icp, который пропорционален измеряемому линейному ускорению; посредством широтно-импульсного модулятора микроконтроллера формируют последовательность рабочих импульсов, посредством таймера микроконтроллера формируют два равных по величине вспомогательных импульса длительностью τвсп и две равные по величине паузы τпауз, при этом длительность рабочего импульса τраб(n⋅T0) на «n»-м такте определяется выражением
где IДМ max - цифровой код, определяемый соотношением  , длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы τпауз выбрана в соответствии с выражением
, длительность каждого вспомогательного импульса τвсп равна либо превышает время переходного процесса по переднему фронту рабочего импульса, а длительность каждой паузы τпауз выбрана в соответствии с выражением  , где минимальная длительность паузы равна
, где минимальная длительность паузы равна  , обеспечивают с помощью стабилизатора тока формирование постоянной и высокостабильной величины амплитуды Ia рабочего и вспомогательных импульсов, размещают вспомогательные импульсы либо: в начале каждого «nT0»-го такта дискретизации размещают первый вспомогательный импульс тока; к первому вспомогательному импульсу присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения
, обеспечивают с помощью стабилизатора тока формирование постоянной и высокостабильной величины амплитуды Ia рабочего и вспомогательных импульсов, размещают вспомогательные импульсы либо: в начале каждого «nT0»-го такта дискретизации размещают первый вспомогательный импульс тока; к первому вспомогательному импульсу присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения  , размещают на интервале T0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса;
, размещают на интервале T0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса;
либо: на «n⋅T0»-м такте дискретизации размещают первый вспомогательный импульс тока; к этому вспомогательному импульсу тока присоединяют рабочий импульс; через промежуток времени, обеспечивающий выполнение соотношения  , размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса, а в начале следующего «(n+1)⋅T0»-го такта дискретизации размещают первый вспомогательный импульс, знак которого совпадает со знаком второго вспомогательного импульса «n⋅T0»-го такта дискретизации, через интервал времени, обеспечивающий выполнение соотношения
, размещают на интервале Т0 второй вспомогательный импульс, при этом знак первого вспомогательного импульса совпадает со знаком рабочего импульса, а знак второго вспомогательного импульса противоположен знаку рабочего импульса, а в начале следующего «(n+1)⋅T0»-го такта дискретизации размещают первый вспомогательный импульс, знак которого совпадает со знаком второго вспомогательного импульса «n⋅T0»-го такта дискретизации, через интервал времени, обеспечивающий выполнение соотношения  , размещают второй вспомогательный импульс «(n+1)⋅T0»-го такта, знак которого соответствует знаку рабочего импульса, который формируют и присоединяют ко второму вспомогательному импульсу.
, размещают второй вспомогательный импульс «(n+1)⋅T0»-го такта, знак которого соответствует знаку рабочего импульса, который формируют и присоединяют ко второму вспомогательному импульсу.
| RU 97102471 A, 10.03.1999 | |||
| Способ повышения виброустойчивости акселерометра | 1967 |
|
SU1839937A1 |
| WO 1996010185 A1, 04.04.1996 | |||
| US 4932261 A, 12.06.1990. | |||

