1 12
Изобретение относится к приборо- строению, в частности к конструкции акселерометров - чувствительных элементов автоматических систем.
Целью изобретения является повы шение точности работы путем формирования дополнительного компенсирующего сигнала, получаемого в результате квантования по уровню выходного сигнала акселерометра.
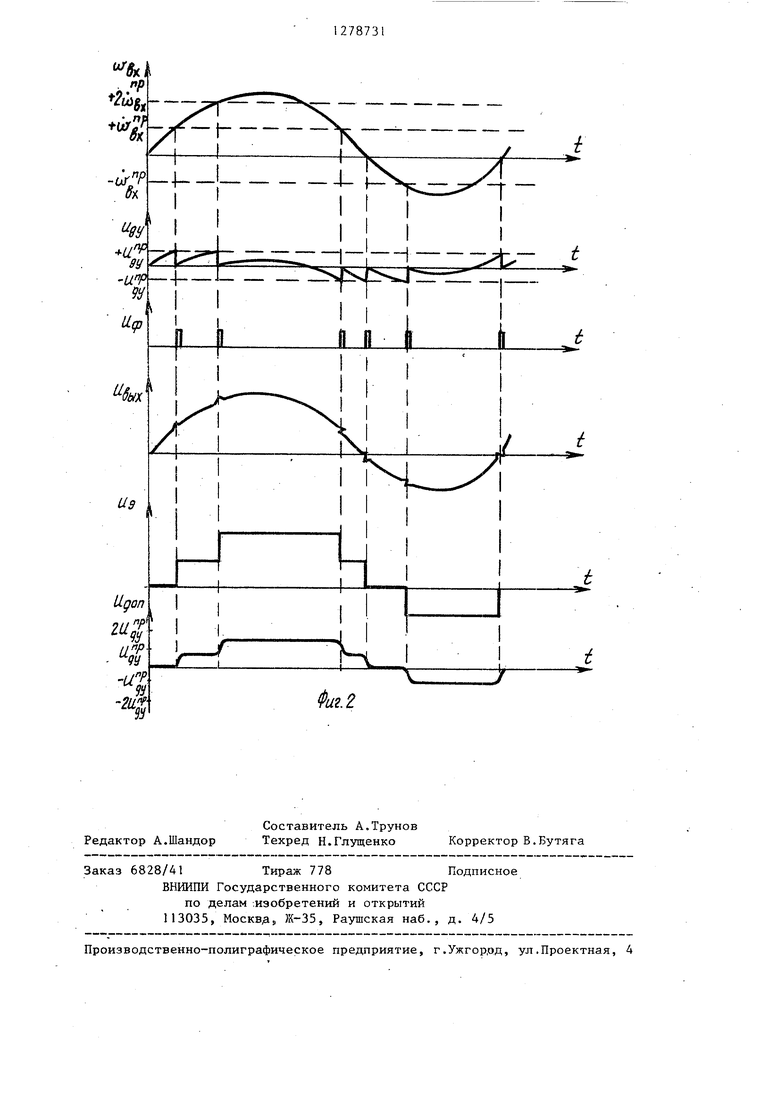
На фиг.1 приведена структурная схема маятникового компенсационного акселерометра;- на фиг,2 - временные диаграммы, поясняющие работу акселерометра.
Акселерометр содержит расположенный в опорах корпуса прибора маятниковый чувствительный элемент (ЧЭ) 1, датчик 2 угла, фиксатор 3, экстра- полятор 4,.формирователь 5, усили- тель 6 обратной связи и датчик 7 момента .
Фиксатор 3 предназначен для определения момента превышения выходного
сигнала датчика угла Ua,, над сигнапр3D
лом и„ц 5 соответствующему предельному значению измерительного преобразования.
Управляющий сигнал фиксатора 3 (Uqj,) вызнает срабатывание экстрапо- лятора 4, который запоминает мгновенное значение выходного сигнала
усилителя 6 обратной связи в момент пр
равенства Uqy и Uoy .
. Зт jj
Формирователь 5 предназначен для корректировки формы и масштабировани выходного сигнала экстраполятора 4. Его динамические параметры выбираются с учетом инерционных свойств акселерометра и быстродействия экстраполятора, а масштабный коэффициент выбирается равным обратному значению коэффициента усиления усилителя 6 обратной связи.
Акселерометр работает следующим образом,
При измерении ускорений, величина которых не превышает предельного значения измерительного преобразования, ЧЭ акселерометра отклоняется на угол об - oinp . Сигнал с выхода датчика 2 угла через усилитель 6 обратной связи поступает в датчик 7 момента, который вырабатывает момент обратной связи, уравновешивающий мо мент инерционных сил, действующих на ЧЭ акселерометра. Сигнал rfa экстраполятора 4 в этом случае равен
fO
5 .
20
25
30
40
зс
я
45
50
55
нулю, так как напряжение Uqn не пре Ои
вышает напряжения срабатывания фиксатора 3
При измерении ускорений, величина которых превыщает предельное значение измерительного преобразования,
выходной сигнал датчика угла достипр
гает значения ILy , при котором срабатывает фиксатор 3. Управляющий сигнал Uno фиксатора 3 включает экстра- полятор 4, который запоминает мгновенное значение выходного сигнала усилителя обратной связи в момент -равенства и аи -и Unu при этом выходное
напряжение экстраполятора U изменяпр ос ется скачком на вешичину U J. Кн.
Сигнал на выходе формирователя 5 появляется с некоторым запаздыванием относительно момента изменения сигнала на его выходе. Эта задержка необходима для того, чтобы исключить образование замкнутого контура из усилителя обратной связи, экстраполятора и формирователя. Уровень сигнала АОП 3 выходе формирователя в Кц раз меньше его входного сигнала, а длительность фронта равна времени возврата ЧЭ акселерометра в положение нуля под действием дополнитель- гого момента обратной связи.
Таким образом, после срабатывания фиксатора на второй вход усилителя обратной связи поступает дополнительный сигнал, изменяющийся от нуля до - пр
. При этом на второй вход усилителя обратной связи поступает дополнительный сигнал, изменяющийся от нуля до UoL . При этом к ЧЭ акселерометра прикладывается дополнительный момент обратной связи, под действием которого ЧЭ возвращается к положению нуля. При уменьшении сигнала Uau до нуля момент обратной связи оказывается равным моменту инерционных сил, действующих на ЧЭ, а выходное напряжение акселерометра при этом определяется величиной сигнала , соответствующего значению UOM .
В дальнейшем при любом изменении входного воздействия ( ЧЭ акселе-, рометра будет отклоняться от нулевого положения в ту или другую сторону, а выходной сигнал акселерометра при этом будет соответственно изменяться за счет изменения Uau . Отклонение ЧЭ при изменении входного воздействия будет продолжаться ,
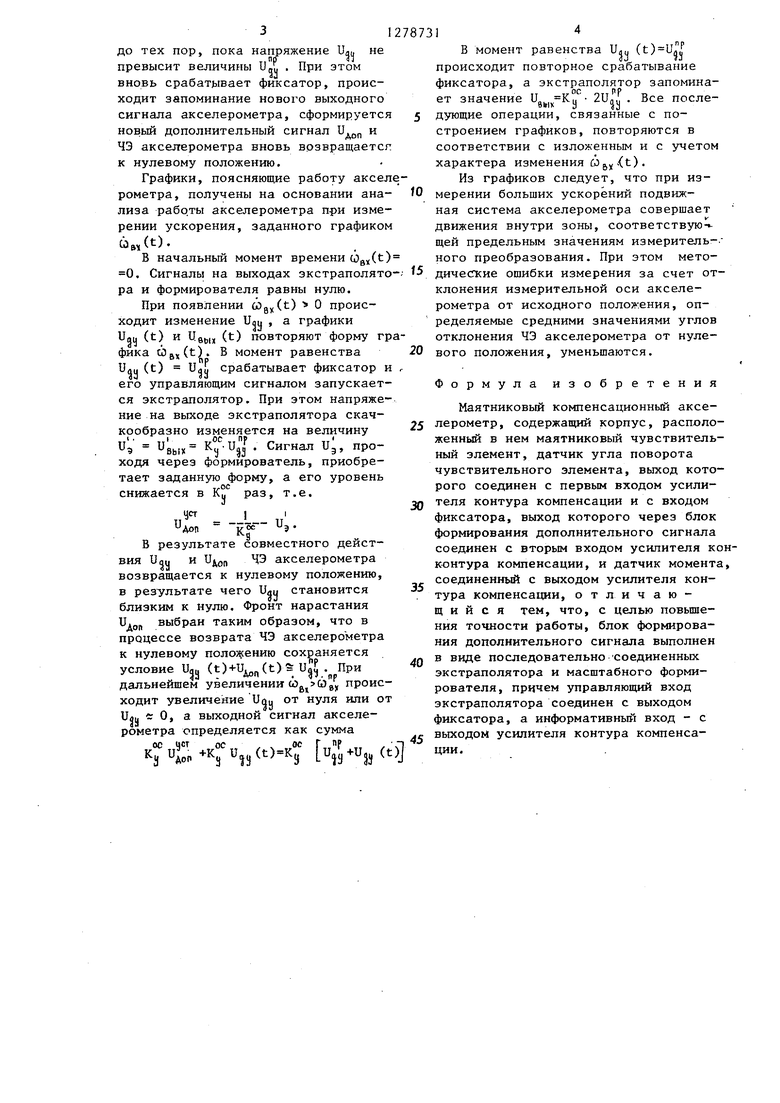
до тех пор, пока напряжение Паи не превысит величины При этом вновь срабатывает фиксатор, происходит запоминание нового выходного сигнала акселерометра, сформируется 5 новый дополнительный сигнал к ЧЭ акселерометра вновь возвращается к нулевому положению.
Графики, поясняющие работу акселерометра, получены на основании ана- fO лиза рабрты акселерометра при измерении ускорения, заданного графиком U6(t).
В начальный момент времени )
В момент равенства UOM (t)ur|| происходит повторное срабатывание фиксатора, а экстраполятор запоминает значение
2U
пр У
Все последующие операции, связанные с построением графиков, повторяются в соответствии с изложенным и с учетом характера изменения ы .{t) .
Из графиков следует, что при измерении больших ускорений подвижная система акселерометра совершает движения внутри зоны, соответствую щей предельным значениям измеритель. ного преобразования. При этом мето 0. Сигналы на вьпсодах экстраполято-; 5 дические ошибки измерения за счет от- ра и формирователя равны нулю. При появлении () О происходит изменение Uny , а графики
Unu (t) и Ивых (t) повторяют форму граУЯИ (t) Uql, срабатывает фиксатор и
фйка uaK(t). В момент равенства
9а н
его управляющим сигналом запускается экстраполятор. При этом напряжение на выходе экстраполятора скачкообразно изменяется на величину u g Кц-иЛ . Сигнал Ug, проходя через формирователь, приобретает заданную форму, а его уровень
,,ос снижается в Кц раз, т.е.
20
клонения измерительной оси акселерометра от исходного положения, определяемые средними значениями углов отклонения ЧЭ акселерометра от нулевого положения, уменьшаются.
Формула изобретения
а
30
Маятниковый компенсационный аксе- 25 лерометр, содержащий корпус, расположенный в нем маятниковый чувствительный элемент, датчик угла поворота чувствительного элемента, выход которого соединен с первым входом усилителя контура компенсации и с входом фиксатора, выход которого через блок формирования дополнительного сигнала соединен с вторым входом усилителя кон контура компенсации, и датчик момента, соединенный с выходом усилителя контура компенсации, отличающийся тем, что, с целью повышения точности работы, блок формирования дополнительного сигнала выполнен в виде последовательно Соединенных экстраполятора и масштабного формирователя, причем управляющий вход экстраполятора соединен с выходом фиксатора, а информативный вход - с выходом усилителя контура компенсации.
и
уст АОП
1
тгОС
и
э
в результате совместного действия Uqu и ЧЭ акселерометра возвращается к нулевому положению, в результате чего Uau становится близким к нулю. Фронт нарастания
и
АОП
выбран таким образом, что в
процессе возврата ЧЭ акселерометра к нулевому положению сохраняется
условие Uqu (t)+U...(t)S Ug . При 3 . ч ftp
дальнейшем увеличении происходит увеличение UQM от нуля или от Паи О, а выходной сигнал акселерометра определяется как сумма
ее
к uj::, .к; и (t)
(t
В момент равенства UOM (t)ur|| происходит повторное срабатывание фиксатора, а экстраполятор запоминает значение
2U
пр У
Все последующие операции, связанные с построением графиков, повторяются в соответствии с изложенным и с учетом характера изменения ы .{t) .
Из графиков следует, что при измерении больших ускорений подвижная система акселерометра совершает движения внутри зоны, соответствую щей предельным значениям измерительного преобразования. При этом методические ошибки измерения за счет от-
клонения измерительной оси акселерометра от исходного положения, определяемые средними значениями углов отклонения ЧЭ акселерометра от нулевого положения, уменьшаются.
Формула изобретения
30
t)
Маятниковый компенсационный аксе- 25 лерометр, содержащий корпус, расположенный в нем маятниковый чувствительный элемент, датчик угла поворота чувствительного элемента, выход которого соединен с первым входом усилителя контура компенсации и с входом фиксатора, выход которого через блок формирования дополнительного сигнала соединен с вторым входом усилителя кон- контура компенсации, и датчик момента, соединенный с выходом усилителя контура компенсации, отличающийся тем, что, с целью повышения точности работы, блок формирования дополнительного сигнала выполнен в виде последовательно Соединенных экстраполятора и масштабного формирователя, причем управляющий вход экстраполятора соединен с выходом фиксатора, а информативный вход - с выходом усилителя контура компенсации.
35
40
45
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Акселерометр | 1978 |
|
SU748300A1 |
| Компенсационный маятниковый акселерометр | 1985 |
|
SU1286902A1 |
| Маятниковый компенсационный акселерометр | 1981 |
|
SU1075169A1 |
| СПОСОБ КОМПЕНСАЦИИ ПЕРЕКРЕСТНЫХ СВЯЗЕЙ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2020 |
|
RU2735260C1 |
| Компенсационный маятниковый акселерометр | 1989 |
|
SU1638638A1 |
Изобретение относится к приборостроению и позволяет повысить точность работы акселерометра, который содержит маятниковый чувствитель- ньй элемент (ЧЭ) I, датчик 2 угла, фиксатор 3, экстраполятор 4, форми-- рователь 5, усилитель 6 обратной связи и датчик 7 момента. Введение новых элементов и образование новых связей между элементами устройства позволяет формировать дополнительный компенсирующий сигнал, полученный в результате квантования по уровню выходного сигнала акселерометра. При измерении больших ускорений устройство совершает движения внутри зоны, соответствующей предельным значениям измерительного преобразования. Методические ошибки измерения за счет отклонения измерительной оси акселерометра от исходного положения, определяемые средними значениями угла отклонения ЧЭ 1 акселерометра от нулевого положения, уменьшаются. 2 ил. & (Л 1C ас 4j 00
Редактор А.Шандор
Составитель А.Трунов Техред Н.Глущенко
Заказ 6828/41 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам .изобретений и открытий 113035, Москвд, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгордд, ул.Проектная, 4
Корректор В.Бутяга
| Маятниковый компенсационный акселерометр | 1981 |
|
SU1075169A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
